基于光量子態避錯及容錯傳輸的量子通信?
2018-08-02 05:46:38鄧富國李熙涵李濤3
物理學報 2018年13期
鄧富國 李熙涵 李濤3)
1)(北京師范大學物理學系,北京 100875)
2)(重慶大學物理系 重慶 400044)
3)(南京理工大學理學院,南京 210094)
量子通信以量子態為信息載體在遠距離的通信各方之間傳遞信息,因此量子態的傳輸和遠距離共享是量子通信的首要步驟.信道噪聲不僅會影響通信效率還可能被竊聽者利用從而威脅通信安全,對抗信道噪聲是實現安全高效量子通信亟需解決的問題.本文介紹基于光量子態的兩類對抗信道噪聲的實用方法——量子態的避錯傳輸和容錯的量子通信,包括對抗噪聲的基本原理和兩種方法的代表性方案,并從資源消耗和可操作性的角度分析了方案的實用價值.
1 引言
量子通信 (quantum communication)利用量子態加載信息,借助量子力學的基本原理保障通信安全,是近30年發展起來的一門新型交叉學科,是量子信息處理的兩個主要研究方向之一.自第一個量子密鑰分配方案于1984年提出以來[1],量子通信在理論和實驗上都取得了重要發展.理論上,量子通信根據不同通信情境的需要衍生出不同的分支,如量子密鑰分配(quantum key distribution,QKD)[1?7],量子機密共享(quantum secret sharing,QSS)[8?10]、量子安全直接通信(quantum secure direct communication,QSDC)[11?17],量子隱形傳態(quantum teleportation)[18?20],量子密集編碼(Quantum Dense Coding)等[21,22].經過30年的發展歷程,每一個分支都涌現出一批優秀的理論方案.實驗上,量子態制備和量子通信的距離不斷刷新紀錄,部分產品已經開始商用[23].相較于量子信息處理另一個重要的研究方向——量子計算[24?51],量子通信將更早地全面進入人類生活,提供絕對安全的機密通信方式.
一般而言,量子通信方案包含四個主要的部分,即量子態的制備、傳輸、操控和測量,通信中用于攜帶信息的物理實體也從以上四個方面被考量.經過30年的實驗探索,光子由于其傳輸快速、容易操控和測量、與環境耦合較弱等優點被認為是理想的信息載體,已有的大量量子通信實驗采用光子的極化(偏振)或相位自由度加載信息.實際上,光子有眾多自由度可用于加載量子信息[44?64],但目前光子的極化自由度相較于其他自由度(相位、路徑、時間、頻率、軌道角動量)在操控和測量方面的技術更成熟,是最常用的量子信息載體.
早期的理論研究側重于物理模型的構建,主要基于理想狀態下的物理原理設計通信模型.隨著實驗技術的不斷提高,實驗中存在的問題逐漸浮現——量子態的制備和探測效率低、操作和傳輸過程中存在損耗等.其中,光子的偏振自由度在傳輸過程中會受到熱漲落、介質的不均勻性以及光纖雙折射現象的影響.這些影響不僅會降低量子態的保真度從而影響通信效率,而且可能被竊聽者利用從而威脅量子通信的安全.因此量子態的保真傳輸和共享是實現安全量子通信的先決條件,是量子通信實用化進程中亟需解決的關鍵問題之一.
通常,我們將可能對量子系統造成擾動的外界因素統稱為噪聲.噪聲造成量子態出錯(error).為減少或消除錯誤,人們提出了一些有效的對抗噪聲的方法.處理噪聲影響的一般思路是:首先需要確定出錯位置,發現錯誤;隨后采取相應的操作,即對于不能糾正或不易糾正的錯誤采用避免錯誤的方式拋棄出錯樣本,對于可以糾正的錯誤進行糾正修復.此外還有一類方法可以通過設計使錯誤自動抵消,實現容錯的通信過程.
我們可以根據在傳輸過程中采取措施階段的不同將現有的抗噪方法加以分類.第一類方法稱為反饋控制 (feedback-control),即實時監控噪聲的影響然后進行主動補償.這種方法是在“傳輸中”采取措施,但是它需要中斷傳輸,而且對隨時間變化太快的噪聲并不適用.第二類方法是在“傳輸后”采取措施,如糾纏濃縮 (entanglement concentration)[65?89]和漸進式的糾纏純化 (entanglement purification)[90?110].對于傳輸后已被噪聲污染的量子態樣本,糾纏濃縮方法可概率地得到期望的量子態;漸進式的糾纏純化可通過犧牲一部分樣本的方法提高剩余樣本的保真度(純度),并利用不斷迭代的方式得到安全量子通信要求的量子態.這兩種方法均需要光子之間的相互作用,成功率和效率都會受到噪聲強度的影響,對資源的消耗也較大.雖然它們給出了對抗噪聲的有效理論思路,但在實驗上特別是現有的實驗條件下還存在困難.
第三類方法是在“傳輸前”采取措施,如確定的糾纏純化(deterministic entanglement purification)[111?115],量子糾錯碼 (quantum error correction,QEC)[24],量子態的避錯傳輸(quantum error rejection,QER)[116?119]和容錯的量子通信 (fault tolerant quantum communication)等[6,7].它們首先對環境噪聲建立模型,然后根據噪聲的具體形式設計出合適的方案來削弱或消除噪聲的影響.量子糾錯碼借用經典糾錯碼中冗余編碼的思想,用多個物理比特編碼一個邏輯比特,傳輸完成后通過對穩定元的測量發現錯誤并糾正.由于量子糾錯碼基于“少數服從多數”的指錯原則,因此主要適用于多個物理比特同時出錯概率極小的情況.當多個物理比特同時出錯時,錯誤便不能被消除.且該方法對量子操作的要求較高,一般不適用于量子通信.確定的糾纏純化利用光子較穩定的自由度作為輔助在傳輸過程中攜帶信息,避免噪聲的影響.這類方案理論上可以得到保真度為1的量子態,非常適用于糾纏態的遠距離共享(特別是構建量子中繼器),但對基于單光子態的量子通信不適用.容錯的量子通信利用由多粒子系統構建的退相干無關子空間(decoherence free subspace,DFS)在特定的噪聲條件下不受噪聲影響的特點,排除了噪聲的影響.其本質是各個粒子之間已有的糾纏關系將噪聲作用抵消從而表現出不受影響的特性.這類方法雖然需要多個粒子編碼一個邏輯比特,但是完全容錯的特性使其在量子通信中具有很好的實用價值.量子態的避錯傳輸一方面遵循發現錯誤避免錯誤的基本思路,另一方面借用退相干無關子空間中抵消錯誤的思想.這類方法通常針對任意單光子量子態設計,同樣適用于糾纏態.它們對實驗技術條件的要求較低,最終可以概率地得到保真度為1的量子態,在量子通信中有非常好的應用前景.
上述在傳輸前采取措施的抗噪方法均需要對實際信道噪聲建立數學模型.為了方便討論,信道噪聲被簡化成為一個隨時間變化的幺正算符U(t)[6].由于環境條件的變化,噪聲算符隨時間變化.雖然不同的物理實體在不同環境條件下噪聲的具體形式不同,但通常情況下噪聲在一定時間尺度上是緩變的——同時或時間間隔很短的幾個光子或波包在同一噪聲信道中傳輸時受到的影響相同.這一假設稱為聯合噪聲(collective noise)假設[120].這時噪聲對n個光子構成的量子系統的作用可描述為

這里U(t)?是U(t)的厄米共軛算符.一些對抗噪聲的實驗已經驗證聯合噪聲假設可以描述噪聲的一般作用規律,現有的大部分抗噪方案也都是基于聯合噪聲假設展開的.
總體而言,要對抗信道噪聲的影響必然需要借助額外的量子資源.本文主要從資源消耗和可操作性兩個方面考量抗噪方案的實用價值,介紹基于光量子態的避錯和容錯的典型方案,讓讀者對該領域的基本原理和主要成果有一定的了解.在以下的兩個部分中,我們先介紹兩個方向中最具代表性的方案,隨后對該方向的發展歷程和現狀進行綜述,對比不同方案的優缺點并展望該方向的發展前景.
2 量子態避錯傳輸
2.1 光量子態自避錯傳輸方案
量子態的避錯傳輸一般針對單光子任意量子態設計,考慮聯合幺正噪聲的影響,將光子態拆分后傳入噪聲信道,傳輸完成后合并抵消部分噪聲作用,從而有一定概率得到保真度為1的量子態.目前為止,最具實用價值的方案是2007年Li等[116]和Deng等[117]提出的僅需被動式線性光學元件的光量子態自避錯傳輸方案及其改進方案.自避錯傳輸方案的基本原理如圖1所示.
假設待傳輸的單光子任意量子態可表示為

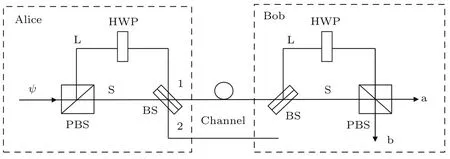
圖1 單光子自避錯傳輸方案原理圖Fig.1.Schematic demonstration of single-photon error rejection scheme.
在編碼裝置的作用下,量子態的演化過程描述為

(3)式中的虛數“i”來自BS反射時的相位突變.由于兩個噪聲信道上的情況類似,以下僅以信道1為例加以說明.下標L和S代表兩個不同的時間態.前后兩個時間上波包的極化狀態均為,將受到完全相同的噪聲影響.任意噪聲的作用表示為
δ和η為噪聲系數,取決于信道.在噪聲的作用下,信道1中的量子態變為

接收者Bob的解碼裝置與Alice的裝置的元件一樣但順序相反,UI長短臂的長度差設定為相同值,其作用如下:

下標a,b代表Bob處PBS的兩個出口.由(6)式可以看出,下劃線的部分“SL”或“LS”代表經歷長臂和短臂各一次,同時到達,且這兩部分可以在幺正操作的幫助下恢復為原態.而“SS(LL)”代表兩次經歷短(長)臂,過早(晚)到達,可以用時間挑選的辦法將這兩部分排除.因此保留下來的量子態恢復為原態的成功率為1/4.考慮到信道2的情況,整個方案的成功率為50%.
這個單光子避錯傳輸方案非常簡單,利用時間上不同的兩個部分經歷相同的噪聲后相互抵消部分噪聲,通過時間挑選獲得期望的量子態.方案僅使用線性光學元件,不需糾纏,不需要輔助粒子,不需主動控制,是一個在現有技術條件下非常實用的避錯傳輸方案,適用于所有的單向量子通信.它不僅可以用于傳輸單光子任意純態,還可以用于傳輸與其他粒子處于糾纏的混合態,有非常好的應用前景.特別值得一提的是,方案的成功率與噪聲信道無關.無論噪聲強弱均可達到相同的成功概率.
2.2 高效的光量子態自避錯傳輸方案
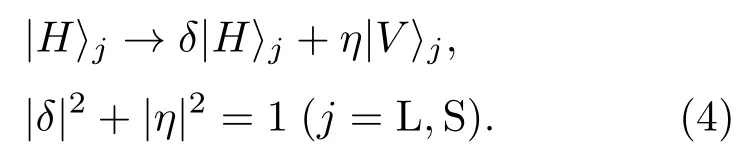
光量子態自避錯傳輸方案的不足之處在于使用了兩個信道傳輸且為獲得100%保真度的量子態而犧牲了一半的成功率.這是由于利用時間自由度進行挑選,而時間自由度并不像極化自由度那樣容易操控.為了彌補這一不足,Deng等[117]隨后提出了一個改進方案將極限情況下的成功率提高到(2N+1?1)/2N+1,且只需一個信道傳輸,N代表Bob解碼裝置中增加的不等臂干涉儀的數目.為了簡單說明改進方案的原理,下面以N=1為例加以說明,其原理如圖2所示.
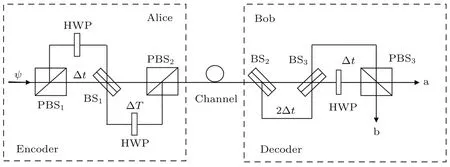
圖2 高效的單光子自避錯傳輸方案原理圖(N=1)Fig.2.Schematic demonstration of the efficient single-photon error rejection protocol(N=1).
這里Alice引入另一個不等臂干涉儀將本來應由信道2傳輸的量子態導回噪聲信道1,且這兩個波包與信道1原來傳輸的波包的時間間隔(即第二個不等臂干涉儀的長短臂差)取為?T=?t/2.這時進入噪聲信道的量子態表示為
四個波包兩兩一組,根據其極化狀態可分別稱為H組和V組.組內波包時間間隔為?t,組間時間間隔為?T.兩組波包的解碼過程類似,以下僅以H組為例加以說明.信道噪聲對不同偏振態的作用不同,表示如下:噪聲作用后的H組波包變為



下標?t代表被延遲的時間.Bob的解碼裝置中新增了一個長短臂差為2?t的UI,它將H組的兩個波包分為四個,相鄰波包的時間間隔均為?t. 波包劈裂沒有調節光子的極化狀態,因此系數為δ1的部分一定會由解碼裝置的b口出射,而系數為η1的部分一定會由解碼裝置的a口出射,兩部分的量子態只相差一個操作. 經過UI和解碼裝置的作用,量子態演化為

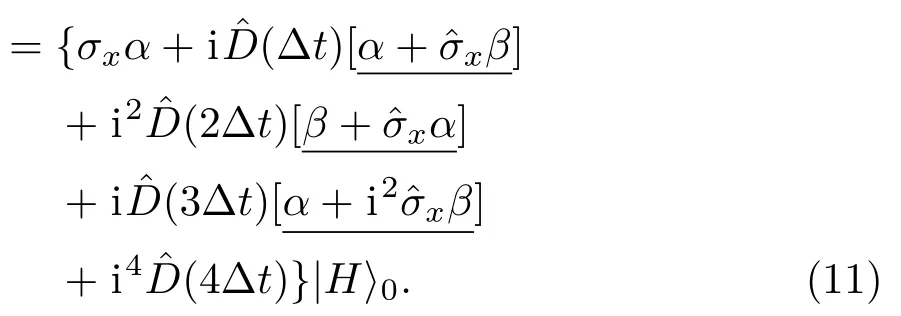
由(11)式可以看出,下劃線部分的量子態與原態只相差一個幺正操作,它們將分別于?t,2?t,3?t三個時刻到達.因此可以根據量子態到達的時刻選擇相應的幺正操作恢復原未知態.V組的情況與H組類似,整個方案的成功率為3/4,同樣與噪聲系數完全無關.在這個方案中由于將波包數目翻倍,增加了有效事件發生的概率,大大提高了方案的成功率.通過類似的方法引入更多的不等臂干涉儀把波包劈裂更多份,可進一步提高恢復原態的成功率,圖3所示為推廣的接收者的解碼裝置.
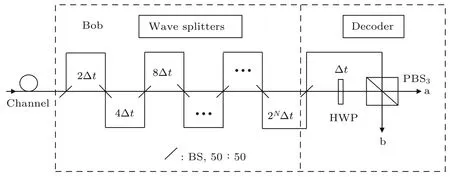
圖3 改進的接收者解碼裝置Fig.3.Schematic demonstration of the improved decoder.
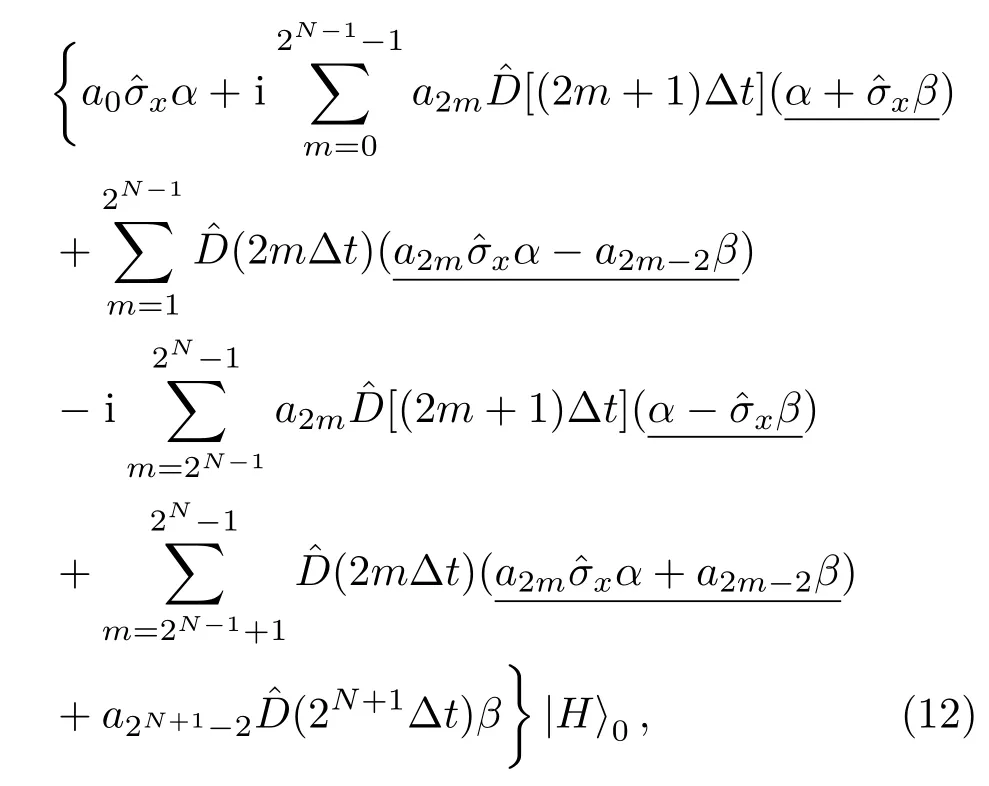
該裝置引入N個不等臂干涉儀用于波包劈裂,第N個干涉儀的長短臂差為2N?t.這樣態的兩個波包將被分為2N+1個,相鄰波包的時間間隔為?t.長短臂差為?t的解碼裝置使波包數目翻倍,原量子態將塌縮到2N+1+1個響應時刻.其中有用的響應事件有2N+1?1個,因此方案的成功率為(2N+1?1)/2N+1.最后得到的量子態可寫為
2.3 主動調制的光量子態避錯傳輸方案
除了使用被動式線性元件的方案外,2005年,Kalamidas[118]曾基于主動調節元件普克爾盒(Pockels cells,PC)提出過兩個噪聲條件下的量子態傳輸方案.第一個方案的原理如圖4所示,Alice的編碼裝置由不等臂干涉儀和普克爾盒PCA構成.PC是一種高電壓控制的偏振態調節裝置,它能調節特定時刻通過的光子的偏振狀態.Alice調節PCA使其只對后一個時刻到達的波包進行偏振態翻轉操作,即
在編碼裝置的作用下,單光子任意未知態變為

噪聲對量子態的作用可以用一個普適的幺正操作算符U來描述
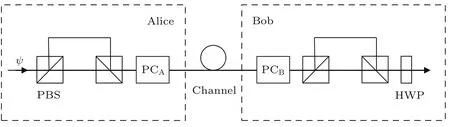
圖4 主動調節的單光子避錯傳輸示意圖Fig.4.Schematic demonstration of single-photon error rejection based on the active modulator.
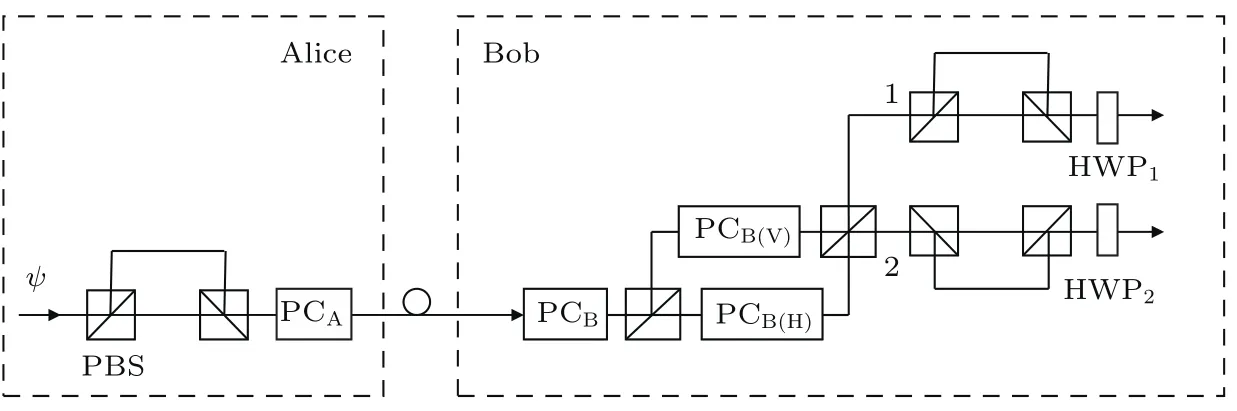
圖5 改進的主動調節的單光子避錯傳輸示意圖Fig.5.Schematic demonstration of improved single-photon error rejection based on the active modulator.
前后兩個波包的時間間隔一般調節為納秒量級,滿足聯合噪聲假設.這樣經過噪聲作用后進入Bob解碼裝置的量子態為

Bob的解碼裝置由PCB、不等臂干涉儀和半波片構成.這里PCB的作用是對前一個時刻到達的波包進行偏振態翻轉操作,即Bob的不等臂干涉儀與Alice的完全一致,即雙方在傳輸之前事先校準了兩干涉儀的長短臂差,使兩長臂對波包造成的延遲完全相同.半波片的作用為對偏振態進行比特翻轉操作.在解碼裝置中一系列光學器件的作用下,的演化過程為

可以看到最后一行的第一項與原未知態形式完全一致,且兩部分同時到達,方案的成功率為cos2θ,取決于噪聲系數的大小.當θ足夠小時,方案的成功率趨近于1,通過對噪聲參數θ取隨機平均可以得到平均成功率為1/2.
第二個方案的原理如圖5所示,作者通過對Bob解碼裝置的改進將方案升級為具有糾錯功能的量子態傳輸方案.接收者引入兩個新的PC,PCB(H)只對前一時刻(S)經過的態進行翻轉,PCB(V)只對后一時刻(L)經過的態進行翻轉,具體演化形式與結果如下
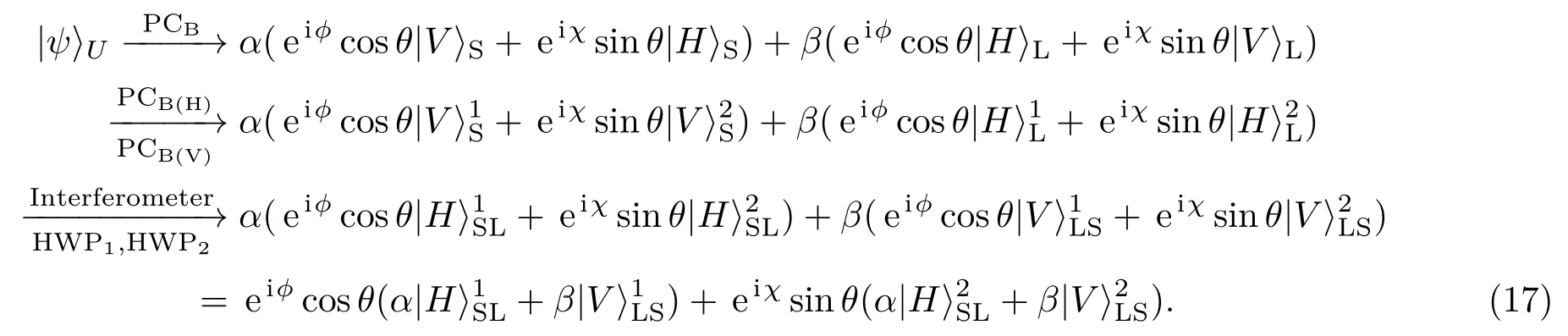
上標1和2表示Bob的兩個接收端.由(17)式可見Bob總是能在確定的時刻得到未受到噪聲影響的量子態.兩個出口1,2得到原態的概率分別為cos2θ和sin2θ,方案的總成功率為100%.可以將出口1看作避錯模式,出口2看作糾錯模式.這個方案是一個自糾錯的傳輸方案,作者通過巧妙的設計使得最后得到的量子態自行抵消了噪聲引起的錯誤.不過這個方案中PC不僅要對選定的時間進行操作,還要區分不同的偏振狀態進行操作,增加了實驗的復雜度.
上述的兩個方案都是單光子自避錯傳輸方案,僅需線性光學元件,在噪聲信道中實現了任意單光子量子態的保真傳輸.方案不僅適用于單光子純態,同樣適用于混合態[122],具有廣泛的應用前景.第一個主動式方案的不足在于成功率受噪聲系數的影響,兩個方案中用到的普克爾盒PC需要高電壓控制,對時間操作的精確度要求很高,在目前的實驗條件下實現存在一定困難,這將大大限制它們在實際量子通信中的應用.
2.4 其他避錯傳輸方案及其應用
除了劈分光子實現自避錯的方法外,研究者們還提出過很多在噪聲條件下實現單光子任意態保真傳輸的方案.2005年,Yamamoto等[119]提出了借助處于的輔助光子的單光子避錯傳輸方案.方案中輔助光子與任意單光子態先后經相同的裝置導入噪聲信道,經歷相同的噪聲作用,隨后通過對兩個光子進行宇稱檢測排除出錯的事件,從而可得到保真度為1的量子態.該方案的優點在于不需利用糾纏,只需線性光學元件,但方案的成功率較低且與噪聲參數有關,在光子數探測器和兩比特門的輔助下成功率僅為1/8,與前面提到的單光子自避錯方案[116,117]相比在可操作性和成功率上完全沒有優勢.該課題組隨后對方案進行了實驗驗證[123]并將方案推廣用于傳輸處于糾纏態的一個粒子以實現遠距離保真的糾纏分發[124].此后他們用弱相干脈沖(weak coherent light pulse,WCP)替代輔助單光子,并將輔助相干光與信號粒子同時且反向傳輸,將基于兩粒子方案的成功率由原來的O(T2)提高到了O(T)(T為單光子在噪聲信道中的傳輸率)[125,126].2009年,Li等[127]同樣借助處于固定狀態的輔助粒子并利用頻率自由度提出了量子態的避錯傳輸方案,理論成功率可達1/2.此外也有利用糾纏輔助的任意量子態傳輸方案[128,129]以及利用兩粒子編碼實現的避錯量子密鑰分配方案[130].從實用性的角度比較,基于被動式線性光學元件的單光子自避錯的量子態傳輸方案[116,117]無論從資源消耗還是可操作性角度都具有較顯著的優勢.
量子態的避錯傳輸方案不僅適用于單粒子純態,還可以用于傳輸處于糾纏的單粒子混合態.前面介紹的方案均可以直接用于在遠距離通信方之間建立糾纏,即糾纏分發 (entanglement distribution).此外還有一些特別為分發糾纏態設計的方案,它們大多引入輔助的自由度協助完成光子極化自由度的遠距離分發,使通信各方以100%的成功率共享高保真的糾纏態[131?136].
3 容錯量子通信方案
3.1 高效容錯量子通信方案
前面已經提到,要對抗信道噪聲,必然需要消耗額外的資源.而糾纏就是一種實用的資源.雖然糾纏態相較于單光子態更難獲得,但隨著實驗技術的不斷發展,目前制備兩粒子糾纏態的技術已經比較成熟,兩粒子最大糾纏態也被廣泛應用于量子通信的各個分支領域,它們同樣可以用于對抗環境噪聲,構建容錯的DFS.由于篇幅有限,本文只介紹完全容錯的量子通信方案.
2008年,Li等[7]基于兩粒子貝爾(Bell)態提出了兩個分別對抗不同類型聯合噪聲的高效量子密鑰分配方案.為方便后續討論,本文中將這兩個方案稱為FTQKD2008方案.
第一個方案為對抗聯合退相位噪聲(collective dephasing noise)的QKD方案.聯合退相位噪聲的作用形式為

其中φ為信道噪聲的參數,隨時間緩慢變化.在此種形式的噪聲下可選取兩個反平行的貝爾態作為邏輯比特構建退相干無關的子空間.這樣構成量子態的兩項在噪聲信道下均會引入eiφ的相位,從而變成全局相位對系統沒有影響.
這兩個貝爾態相互正交,由于一般量子密鑰分配方案總是需要兩組不正交的基矢編碼信息才能保證通信的安全性,作者將糾纏粒子對兩兩編為一組并引入空間自由度來構建兩組不正交的基矢,如圖6所示.
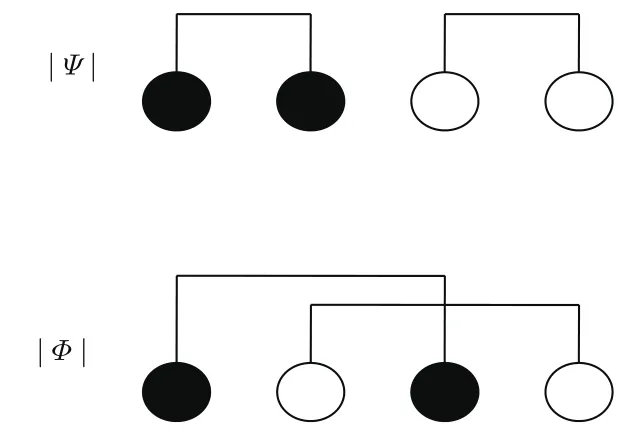
圖6 空間自由度示意圖Fig.6.Schematics of the two spatial bases.
這里空間自由度指的是四個粒子的相對位置,兩種不同的排列順序分別構成相鄰基和交叉基量子態的具體形式如下:
式中下標數字表示四個粒子在信道中的傳輸順序,它們之間的時間間隔為?t.為滿足聯合噪聲假設,要求3?t小于噪聲的漲落時間從而保證四個粒子在傳輸過程中受到噪聲的影響一致.上述四組態在單光子X方向基矢下展開為如下形式:
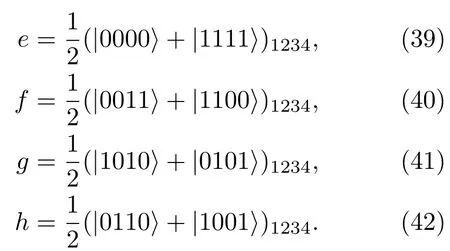
其中
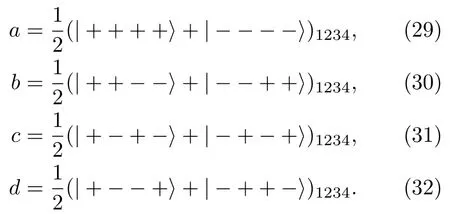
不難驗證兩組基矢內部正交,相互平分.而a,b,c,d四態相互正交,接收者Bob可通過X方向的單粒子測量來區分一組基矢內的兩個量子態.
在密鑰分配過程中,發送者Alice隨機選擇兩組空間基矢制備n+2δ個代表0,1密鑰的四粒子量子態,隨后經噪聲信道發送給Bob.由于選擇了DFS編碼信息,量子態在噪聲作用下保持不變.Bob對接收到的量子態做單粒子直積測量.其中隨機抽取2δ的樣本作為安全性檢測樣本,對一半樣本做方向的直積測量,對另一半做X方向的直積測量.剩下的n個樣本用于產生密鑰,都做X方向的單粒子直積測量并記錄下所有的測量結果,如a,b,c,d.雙方先用檢測樣本比對出錯率.如果出錯率在某一可接受的范圍內,雙方繼續下一步;否則,雙方中斷通信,從第一步重新開始.當通信雙方確認了信道安全后,Alice通過經典信道將空間基矢告知Bob.Bob可根據基矢以及單粒子測量的結果推算出密鑰,將這一部分密鑰作為裸碼.經過糾錯和機密放大等操作后,雙方可建立起一組用于加密信息的安全密鑰.
第二個容錯方案是對抗聯合幺正旋轉噪聲(collective unitary rotation noise)的量子密鑰分配方案,這種噪聲的作用形式為:
其中θ是噪聲參數,它隨時間緩慢變化.對于這種形式的噪聲,可選擇貝爾態作為基本單元來構造DFS.其中. 這兩個態在聯合旋轉噪聲的作用下都保持不變.類似于對抗聯合退相位噪聲的情況,這里也將糾纏粒子對兩兩編為一組
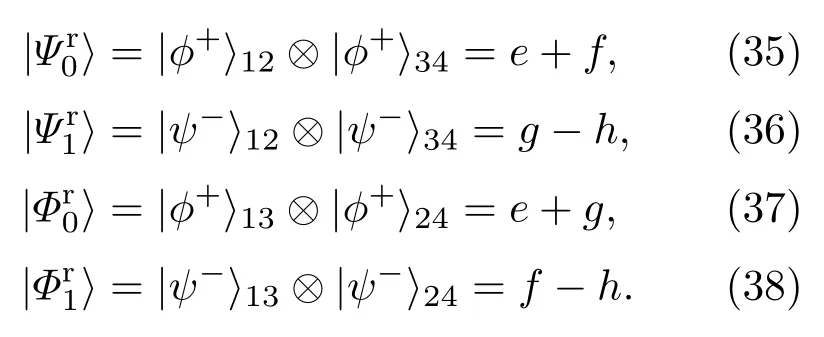
其中
在這兩個量子密鑰分配方案的通信過程中,除了用于安全性檢測的樣本外,其余樣本全部用于產生密鑰,不存在由于選錯基矢造成樣本的損失,很大程度上提高了通信效率.并且Bob除了在安全性檢測中需做少量的Z(X)方向測量外,其余大量測量都是X(Z)方向的.也就是說,接收者測量時不需隨機變換基矢.此外雖然傳輸信息用的是多粒子糾纏態,但接收者不需做聯合貝爾基測量,只需做單粒子測量,大大降低了接收者的操作難度.作為一個量子密鑰分配方案,竊聽者采取不同攻擊手段的最低出錯率為12.5%,可保證通信安全.特別值得一提的是,常見的QKD模型中,兩組不正交基矢的使用會導致一半的樣本由于雙方選擇了不同的基矢而被拋棄,或者需要引入量子存儲技術才能避免傳輸的樣本浪費.而上述方案不需存儲就能避免由于選錯基矢造成的損失.因此雖然方案需要四個粒子編碼一個邏輯比特,但它們作為對抗噪聲的量子通信方案效率并不低.
3.2 同時對抗聯合旋轉噪聲與聯合相位噪聲的量子通信方案
在高效容錯量子通信方案[7]提出之前,Boileau等[6]于2004年也曾提出了兩個利用兩粒子最大糾纏態對抗聯合旋轉噪聲的量子密鑰分配模型.第一個方案用四粒子態編碼1個量子比特,第二個用三粒子態編碼為1個量子比特.方案中用到的基本單元為自旋單態作者利用空間自由度將兩對糾纏粒子對進行了如下三種組合:
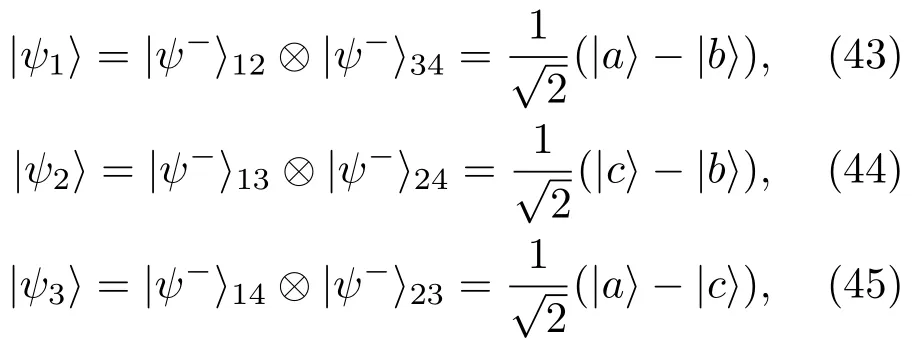
這里
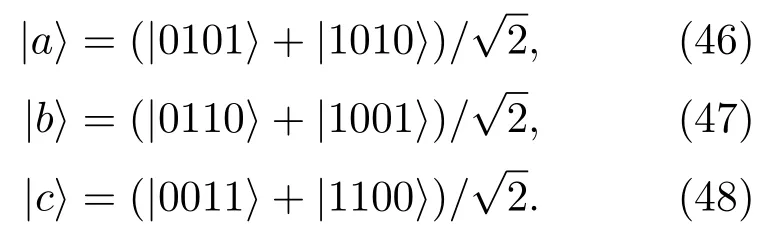
自旋單態在任意旋轉噪聲下保持不變,因此(46)—(48)式中的0和1可以看作單粒子空間的任意一組正交基矢.三個編碼態相互平分因此接收者并不能通過單粒子直積測量直接區分以上三個量子態,測量結果只能提供部分信息.而兩兩之間相互正交,可以通過單粒子直積測量準確地區分它們.如果Alice每次從兩個態中選一個發送,Bob就有一半的機會推測出原態.例如,Alice發送當Bob測量得到中的項時,就可以區分這兩個態,即表示原態是表示原態為但如果測量結果是中的項時,Bob 就不能區分原態.因此在通訊過程中Alice需事先隨機選取一串(4+δ)n比特的密鑰序列X和一串長度為(4+δ)n位的三能級基矢序列B.B序列的值決定用于編碼的量子態:當B=j(j=0,1,2)時,Alice根據X比特的值{0,1}制備態隨后Alice將這(4+δ)n組量子態發送給Bob;Bob收到量子態后隨機選擇X方向或者Z方向做單粒子直積測量,并記錄測量結果;Alice公布基矢序列B,Bob根據這一信息可以判斷自己的測量結果能否推斷初態信息獲得密鑰,雙方拋棄所有測量結果無效的樣本,剩下的樣本用于產生密鑰.
此方案可以同時對抗兩種聯合噪聲,具有更廣泛的適用范圍.接收者也只需做單粒子測量,實驗上容易實現.只是量子比特的利用率不高,一半的測量結果不能用于生成密鑰.隨后,Zhang[137]利用同樣的三個量子態提出了一個噪聲信道下的多方機密共享方案,除了信息的發送方和最后一個測量者外,其余的參與者都采用對調粒子順序的操作加載自己的控制信息.
考慮到多粒子方案對于信道損耗的敏感性,作者還提出了一個三粒子方案,只需對上述方案做少許改進.Alice隨機拋棄其中一個粒子,將剩下的三個粒子發送給Bob.被拋棄粒子的位置信息將同基矢信息一同公布.這樣原來的三個四粒子純態變為三個三粒子混合態.這三個混合態在任意旋轉噪聲下同樣保持不變.
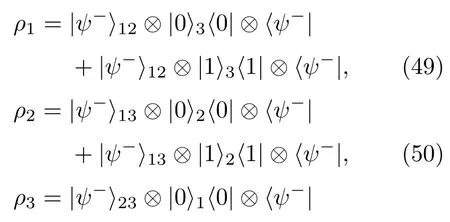

接收者Bob同樣做任意方向的單粒子直積測量.由于只用到三個粒子編碼,方案對信道丟失的敏感度降低,制備初態時也只需制備一對糾纏粒子對,節省了資源.
3.3 容錯量子通信方案應用
我們看到,利用DFS編碼信息是一種非常有效的對抗噪聲的方法,它自動容錯的特點備受青睞.近年來研究者們以文獻[7]中提出的容錯基矢為基本單元針對特定的聯合噪聲將容錯通信在量子通信的不同領域進行推廣,如容錯的量子密鑰分配[138?142],容錯的確定密鑰分配[143?150],容錯的量子機密共享[151,152]、容錯量子直接通信[153?157]和容錯量子對話等[158,159].
2009年,Dong等[145]提出了一個對抗聯合退相位噪聲的確定安全量子通信方案.該方案借用文獻[6]中將四粒子方案簡化為三粒子方案的思想改進了Li等的第二個對抗聯合退相位噪聲的容錯方案. 他們利用在聯合退相位噪聲下保持不變的和單光子態構成編碼的基本單元,引入空間位置構建了兩組不正交的基矢這里下標1,2,3代表三個粒子在噪聲信道中傳輸的順序,即空間排列的位置.在此方案中,接收者只需做三個X方向的單粒子測量,借助發送者的基矢信息就能讀取由量子態編碼的信息,量子態利用率為100%.同年,該課題組進一步推廣了基于空間基矢的量子密鑰分配方案[7],基于三個Einstein-Podolsky-Rosen(EPR)對提出了兩個分別對抗前述兩種聯合噪聲的量子密鑰分配方案[140].方案針對不同的噪聲選擇相應的EPR對作為構建容錯基矢的單元,引入兩種空間排列模式{[12][34][56]}和{[61][23][45]},數字代表不同位置的粒子,方括號代表這兩個粒子處于糾纏)構建兩組不正交的基矢以保障通信安全,通過傳輸三個EPR對可交換兩比特的經典信息.2014年,Lin等[141]將這類容錯方法進一步推廣,同樣引入兩種不同的空間排列{[12][34]…[2n?1,2n]}和{[2n,1][23]…[2n?2,2n?1]}構建了兩組不正交的基矢,提出了傳遞2n個貝爾態可交換n?1比特信息的容錯量子密鑰分配方案.這些方案均延續了FTQKD2008方案的特點,接收者只需進行單光子測量而不需聯合測量,且除安全性檢測外只需進行一個方向的測量,不會由于選錯測量基矢造成樣本浪費,具有非常好的實用價值.
除了容錯的量子密鑰分配方案外,2009年,Gu等[151]提出了分別對抗聯合退相位噪聲和聯合旋轉噪聲的容錯量子機密共享方案.方案利用邏輯比特的糾纏態對抗噪聲,每一個邏輯比特由兩個物理比特編碼,相當于使用四個物理比特糾纏態作為糾纏信道.不過測量時只需做兩個物理比特的貝爾基測量而不需要四粒子聯合測量.整個方案完全容錯,可共享2比特的密鑰.由于使用雙向通信,此方案的效率與FTQKD2008相當.2011年,Li和Li[152]也基于相同的邏輯比特單元提出了兩個容錯的QSS方案,不同之處在于她們選擇邏輯比特的單比特態作為信息載體,測量時只需進行物理比特的單粒子測量,降低了實驗難度.此外,2011年,Gu等[153]基于量子一次一密的原理提出了兩個容錯的量子直接通信方案.同年,Yang等[154]基于兩步量子直接通信方案[12]的原理也提出了兩個容錯的QSDC方案.這兩個方案可算是經典的容錯量子直接通信方案.一般來說,容錯方案的設計思路為根據噪聲形式選擇合適的退相干無關量子態構建容錯基矢作為邏輯比特,將已有的理想條件下的量子通信方案中物理比特用容錯的邏輯比特代替,然后需要重新考慮方案安全性檢測、量子態調控以及測量讀取信息等細節問題.
在一些容錯方案中,研究選擇以對相應噪聲保持不變的物理比特的貝爾態作為邏輯比特,并利用邏輯比特糾纏態作為量子信道,這相當于用物理比特的三粒子或四粒子Greenbergen-Home-Zeilinger糾纏態作為量子信道.這類方案[138,142,147,148,150,151,154,156,157,159]一般都需要接收者做物理比特的聯合貝爾基測量才能讀取信息,在現有的實驗條件下還存在困難.而采用兩個物理比特編碼的邏輯比特作為信息載體的方案一般都只需單粒子測量,這類方案[139,143,146,149,152,153,155]看上去相較于使用四個物理比特的FTQKD2008方案更具優勢.然而實際上,由于安全的量子通信需要兩組不正交的基矢,不同于FTQKD2008中引入空間模式的方法,這些方案選擇采用邏輯比特的疊加基矢作為第二組基矢. 因此會出現類似于經典的BB84方案的情況——由于缺乏基矢信息,接收者隨機選擇測量基將造成一半的測量結果被拋棄,從而降低信息傳遞效率[146].而要解決這一問題,要么需大概率地選擇某一個基矢作為主要的信息攜帶基矢[152],要么需要只選擇一個基矢加載信息但是重排粒子順序[149],這些都需要在通信過程中引入量子態的存儲或延遲來實現.更多的方案選擇采取雙向傳輸的辦法避免隨機測量造成的浪費[139,143,153,155],即由量子態的制備者做測量,發送者的信息用幺正操作編碼.而這相當于兩個物理比特在信道中傳輸兩次實現1比特信息的交換,這與四個物理比特傳輸一次交換1比特信息是基本等價的.由此可見,FTQKD2008方案的設計是非常合理的,它的基本思想可以根據特定的信息傳輸需要加以改進從而應用于其他的量子通信分支中.
前面介紹的容錯方案中都是利用多粒子態構建退相干無關的子空間,利用它們已有的糾纏關系以及經歷相同噪聲的假設抵消噪聲的影響.研究發現,光子的橫模空間自由度在聯合旋轉噪聲下表現出與極化自由度相同的變化規律,因此研究者們提出了利用同一個光子的兩個不同自由度構建DFS從而對抗噪聲的方案[160,161].這類方案是為了解決通信雙方沒有共享坐標系提出的,但它們同樣可用于對抗聯合旋轉噪聲.橫模自由度的一組正交基矢由厄米-高斯模式的兩個一階模式HG01和HG10構成,可分別用h和v表示.由橫模自由度和極化自由度構建的邏輯比特表示為:
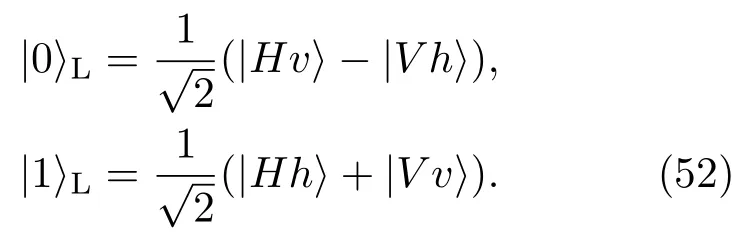
這兩個態相互正交,且在聯合旋轉噪聲下保持不變,可用于容錯的量子通信.具體過程與前面的方案類似.2008年,利用橫模自由度的QKD方案還進行了實驗[161].借助橫模自由度的方案不需多光子糾纏,對光子丟失的敏感度也降低了,不過對于橫模自由度的特性和操控還需要在實驗中進行進一步的研究.
4 小 結
雖然近二十年來研究者們提出了很多對抗噪聲的理論方法,但在現有的實驗條件下光量子態的自避錯傳輸和容錯的量子通信這兩類方法更具實用性.本文介紹了這兩種方法的基本原理和代表性方案.我們看到,在有噪聲的情況下實現安全高效的量子通信勢必要消耗比理想條件下更多的量子資源.噪聲的形式越復雜,所需的資源也越多,這些資源包括輔助的粒子、自由度、糾纏以及更復雜的操作和測量.一般來說,糾正錯誤包括發現錯誤、避免錯誤和糾正錯誤三個層次,避錯比糾錯更容易實現.要發現錯誤,一般需要比對經歷相同噪聲的兩個部分、兩個粒子或兩個自由度;要避免錯誤,需要挑選沒有受到影響的子空間,用額外的自由度、粒子或后選擇來作為指針,判斷是否避錯成功.因此一般來說避錯方案都是概率實現的,要達到100%的成功率需要更復雜的實驗技術或裝置.但是避錯方案一般僅需利用線性光學元件,不需要利用糾纏,實驗上容易實現,易推廣,有非常好的實用價值,可以直接應用于已有的理想量子通信模型.而容錯的方案雖然選擇糾纏態構成的退相干無關的子空間編碼信息,但可以完全包容錯誤,而且很多方案中僅需單粒子測量就可讀取信息,大大降低了實驗難度,也是一種非常高效實用的抗噪手段,在噪聲條件下的量子通信中有非常好的應用前景.
到目前,單自由度光量子態的避錯傳輸方案,借助輔助光子已經在實驗上做了原理性驗證[162];基于DFS的光子對糾纏分發方案借助輔助光子完成了初步的實驗演示[163].自避錯的光量子態方案實驗實現也正在進行各種條件下的探索.
隨著多自由度光量子態在量子信息中的應用,如超并行光量子計算[45?51],高容量的量子中繼器[52],基于多自由度光量子態的量子通信[53?55],超糾纏態產生與區分[57?64],人們開始研究超糾纏純化[95?99],超糾纏濃縮[69,75?80,83],多自由度下的避錯與容錯光量子態傳輸等[164?166]壓制噪聲影響的方法.將這些抵抗噪聲的方法用于各種任務的高容量量子通信分支也是一件很有意義的事情,可能是今后量子信息研究的一個重要方向,譬如應用于量子信號放大[167?172],量子糾纏探測[173?177],邏輯比特糾纏分析[178?181],分布式量子機器學習等[182?184].