基于LoRa的變電站接地網腐蝕監測系統設計*
2018-08-03 03:14:20茆天宇何怡剛羅旗舞史露強
傳感器與微系統 2018年8期
關鍵詞:測量
茆天宇, 何怡剛, 羅旗舞, 史露強, 高 鏡
(合肥工業大學 電氣與自動化工程學院,安徽 合肥 230009)
0 引 言
變電站接地網是維護電力系統安全可靠運行、保障運行人員和電氣設備安全的重要措施[1]。當前,出于環境保護和成本考慮,我國普遍采用低碳鋼而不是銅網作為接地網材料,接地體在土壤中因腐蝕會導致截面積變小、接地電阻值增加,造成接地網壽命減短,嚴重時甚至危及電網的穩定運行[2~4]。因此,對于接地網的腐蝕情況進行在線監測勢在必行。當前大多數對于接地網腐蝕的直接測量均依靠有線的方式進行供電和通信,嚴重限制了腐蝕監測節點的部署。同時,在復雜的電磁環境下,需要一種抗干擾性能優異的通信技術來實現數據的完整準確傳輸。
本文設計了一種無線腐蝕傳感終端,實現對接地網腐蝕狀況的無線遠程監測。
1 監測系統總體設計
接地網腐蝕監測系統由無線腐蝕傳感器、中繼節點、后臺服務器和客戶終端組成,系統架構如圖1所示。系統布設在變電站接地網的各個測試點上,各個無線腐蝕傳感器采集到的電壓數據通過LoRa模塊,將數據發送給中繼節點,再由中繼節點通過互聯網,將數據最終傳遞給后臺服務器。后臺服務器將數據進行存儲和處理,再將處理后得到的腐蝕狀況數據傳送給各個客戶終端,實現對腐蝕數據的云端化處理。
2 LoRa通信技術
LoRa技術采用線性跳頻脈沖系統(Chirp),利用線性跳頻脈沖調制信號,擴展通信信號頻譜帶寬,以實現擴頻通信,并獲得較好的抗干擾性能[5,6]。

圖1 腐蝕監測系統架構
3 接地網腐蝕監測
3.1 測定腐蝕速率的方法
1)開路電位:工作電極(working electrode,WE)和參比電極(reference electrode,RE)之間的電勢差,給出了對于腐蝕可能性的一種估計,但并不提供關于實際腐蝕速率的信息。
2)線性極化:用于測量WE的瞬時腐蝕電流Icorr以及陽極與陰極反應的電化學方法。描述陽極和陰極反應的模型采用Butler-Volmer方程[7]
IT=Icorrexp[2.3(ET-EOC)/βa]-
Icorrexp[2.3(EOC-ET)/βc]
(1)
式中IT為在對電極(counter electrode,CE)和WE之間流動的極化電流;ET為WE和RE之間的極化電位;EOC為開路電位;βa和βc分別為陽極和陰極反應的Tafel常數。在線性極化測量中,極化電位ET在開路電位EOC附近變化。在ET=EOC時,兩個反應均處于平衡狀態,此時極化電流IT= 0。通過計算斜率得到極化電阻值Rp與腐蝕速率。預測的腐蝕電流如圖2所示。
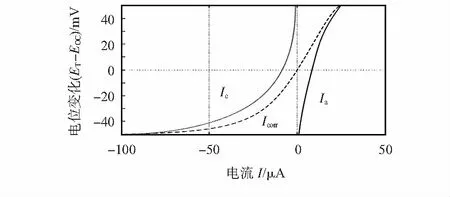
圖2 依據Butler-volmer方程預測的腐蝕電流
從圖2可以看出,在開路電位附近,(ET-EOC)對IT曲線是接近線性的。ET=EOC時的曲線斜率定義為極化電阻值。由式(1),ET=EOC處的曲線的斜率為
(2)
可以解出腐蝕電流
(3)
式中B為關于βa和βc的函數,可通過測量計算獲得[8,9]。最終計算獲得腐蝕電流Icorr。依據法拉第方程可以確定厚度減少的速率
(4)
3.2 腐蝕監測電路設計
如圖3,腐蝕測量電路使用三電極結構,分別為CE, RE和WE[10]。具體測量方法如圖4所示。
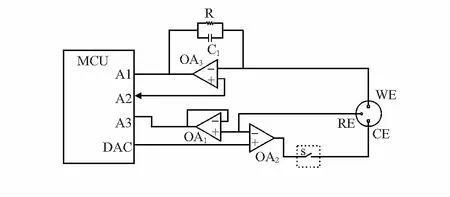
圖3 腐蝕測量示意

圖4 腐蝕測量電路工作流程
4 無線腐蝕傳感監測終端設計
腐蝕監測終端設計如圖5所示。系統中,供電模塊采用取能天線與太陽能供電結合的方式,通過取能天線接收電網中的電磁波,對單片機(micro controller unit,MCU)模塊及腐蝕測量模塊供電。LoRa模塊通過電池組供電。MCU選用TI公司的MSP430F169低功耗芯片,實現對整個傳感電路工作的控制。LoRa芯片采用Semtech公司的SX1278,靈敏度可達148 dB,理論工作時間長達10年。
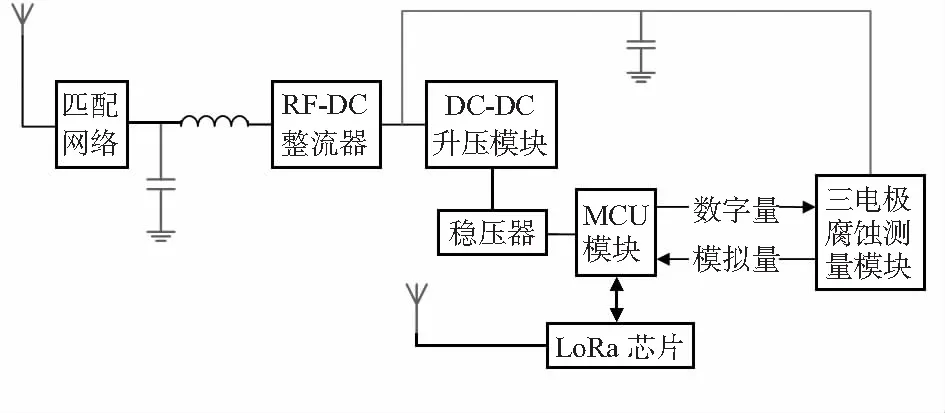
圖5 無線腐蝕傳感終端模塊示意
5 無線終端測試
5.1 通信測試
將無線腐蝕傳感終端分別置于距離中繼節點不同距離的測試點,接收信號的強度指示(received signal strength indication,RSSI)如表1所示。
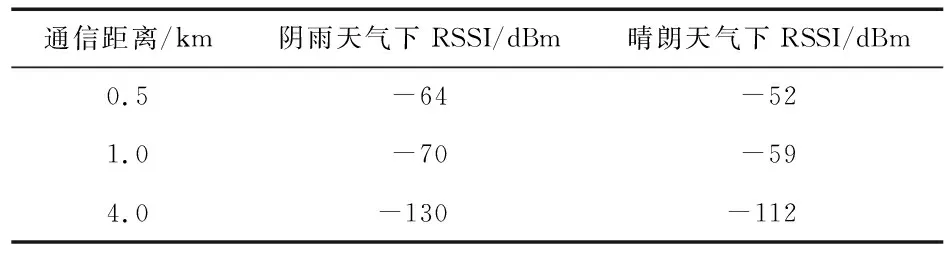
表1 無線腐蝕傳感終端距離測試
5.2 腐蝕測試
WE由被測金屬制成,測試中使用A3鋼作為腐蝕樣本, RE采用飽和甘汞電極, CE采用鉑電極,測試樣本置于3.5 %的氯化鈉溶液中。使用HM—PS—100型電化學工作站在相同環境下進行測量作為對比實驗。測試結果如表2所示。可以看出,腐蝕傳感終端可以對腐蝕趨勢進行較為準確描述,對于準確腐蝕評判具有指導作用。
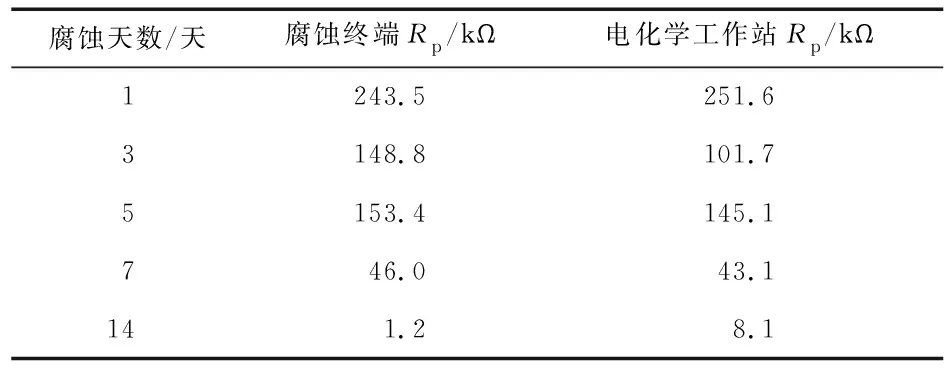
表2 無線腐蝕傳感終端腐蝕測試
6 結 論
本文將腐蝕監測技術與LoRa技術相結合,并將其應用于接地網腐蝕監測中,可以作為接地網腐蝕監測的一個重要參考,能對接地網進行大范圍、長時間觀察。同時憑借LoRa技術,實現在變電站復雜電磁環境下的遠距離抗干擾傳輸。監測人員通過各種終端即可實時了解到接地網當前腐蝕程度,對于判斷實際檢修位置具有重要的參考意義。
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00
