基于粒子群優化的RSSI等弧三邊定位算法*
2018-08-03 05:24:04劉旭明郭志慧
傳感器與微系統 2018年8期
劉旭明, 王 偉, 景 強, 郭志慧
(中北大學 信息與通信工程學院,山西 太原 030051)
0 引 言
室內定位對精度有更嚴格的要求,相比于室外定位,室內定位的可靠性、連續性和穩定性較差[1,2],室外定位系統在室內定位中存在精度不夠、信號不穩定等問題,不能實現從室內到室外定位的無縫對接[3]。室內定位技術基于無線傳感器網絡(wireless sensor networks,WSNs)的節點定位方法按測距與非測距主要有2類:基于測距的定位算法和基于非測距的定位算法。前者通過接收信號強度指示(received signal strength indication,RSSI)、到達時間(time of arrival,TOA)、到達時間差(time difference of arrival,TDOA)或到達角(angle of arrival,AOA)[4]等測度方式獲得節點間的相對位置關系(如距離、角度),然后根據三邊測量[5]、三角測量[6]、最大似然估計法或粒子群算法[7]等定位算法計算盲節點位置。
本文首先基于對數損耗模型的距離與RSSI關系進行分析,得出不同距離范圍與RSSI的相對應關系,提出等弧三邊形的定位算法。在相同的實驗環境下,分別采用方形布局[8]、等邊三角形布局[9]、改進的三角形布局[10]與本文定位效果進行對比,驗證提出算法的優越性。
1 RSSI與距離的關系
在實際中,由于多徑效應等因素的影響通常采用對數損耗傳播模型評估距離和RSSI的關系
(1)
式中d0為近地參考距離;Pr(d0)為近地參考距離的路徑損耗值;d為實際距離;Pr(d)為實際距離d的精確路徑損耗;n為路徑損耗因子,隨環境的改變而變化;X為隨機噪聲,忽略不計。通常d0為1 m,Pr(d0)通過測量可得,記為A;i為不同位置的標記值。則不同位置處距離di與RSSIi的關系為
RSSIi=A-10nlgdi,i=1,2,3,…
(2)

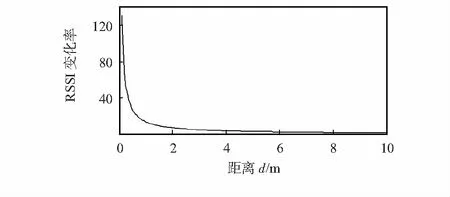
圖2 RSSI變化率與距離的關系
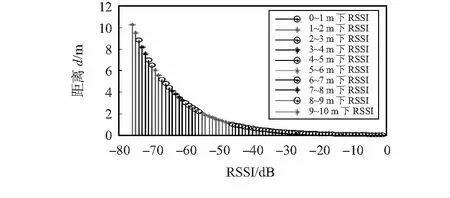
圖3 RSSI與距離關系

2 等弧三邊形定位算法
2.1 等弧三邊模型

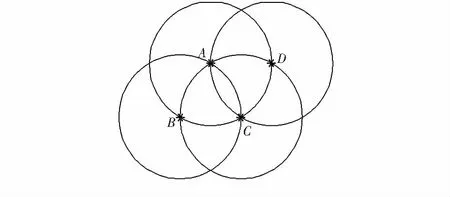
圖4 等弧三邊形節點布署示意
圖4中在等弧三邊形ABC所圍成的區域中,有部分區域也在等弧三邊形ACD所圍成的區域中。位于重疊區域的待測點,能在2種組合中選擇最優的一組進行定位,防止由于干擾等原因出現異常,從而這種選擇性對定位精度的提升起到輔助作用。
2.2 等弧三邊形布局控制RSSI異常值
與傳統三角形定位布局不同,本文以所選取的通信距離r為界,通過對數衰減模型對基站選出的3個最優RSSI值進行計算。如果得到的距離大于通信距離r,判定當前值為異常值,基站重新選出3個最優RSSI值進行計算,最大采集次數為3次。如果采集3次后仍有超越距離r的值,則定位系統將當前異常值重新賦值為r,本文r為4 m。
2.3 等弧三邊形定位算法
結合標準粒子群算法和等弧三邊形布局,本文定位算法步驟如下:
1)初始化信標節點網絡模型。
2)未知節點周期性發送自身信息。
3)各信標節點在收到信息后,記錄同一個未知節點的RSSI測量值,并將其值記錄到對應的RSSI數組中。
4)各信標節點運用卡爾曼濾波處理RSSI值。
5)各節點將步驟(4)中得到的RSSI值傳送到基站,由基站將各節點的RSSI值進行排序,取其最大的3個值,并轉換為距離,分別為d1,d2,d3。
6)判斷d1,d2,d3是否大于r:是,重新取值,累計3次仍大于r,則按r(r=4 m)計;否則,按原值計算。(方形布局模型沒有此步驟)
7)利用標準粒子群優化定位算法,迭代10輪,每輪搜索100次,計算待測點位置(x,y)。
3 實驗分析
3.1 實驗布局
在實驗室一個8 m×8 m的區域內,分別按照方形布局、傳統三角形布局、改進三角形布局和等弧三邊形布局部署信標節點,如圖5中所示。倒三角代表信標節點,“×”代表待測節點。10個待測節點坐標分別為(1,1),(2,2),(3,3),(4,4),(5,5),(4,7),(1,4),(7,4),(2,7),(6,7)。選取最佳通信距離為4 m。
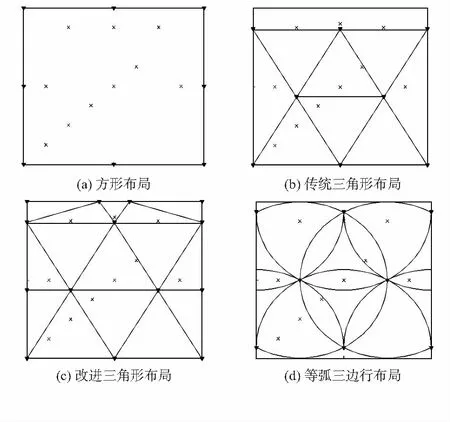
圖5 4種布局的節點分布
3.2 結果分析
通過對比4種布局類型,易知圖5(a)中方形布局未涉及任何細化的區域模型;圖5(b)中傳統三角形布局面積覆蓋率為65 %,即42 m2;圖5(c)中改進三角形布局雖然能夠全覆蓋,但增加了6個節點;圖5(d)中等弧三邊形布局面積覆蓋率為88 %,即56 m2,相比圖5(b)和圖5(c)中布局模型,等弧三邊形布局的單位節點面積覆蓋率更高。
對4種定位布局的數據處理后,得到4種定位布局的誤差對比,如表1所示,可知,等弧三邊形布局較方形布局、傳統三角形布局和改進三角形布局的平均定位精度,分別提高了81 %,54 %和48 %。
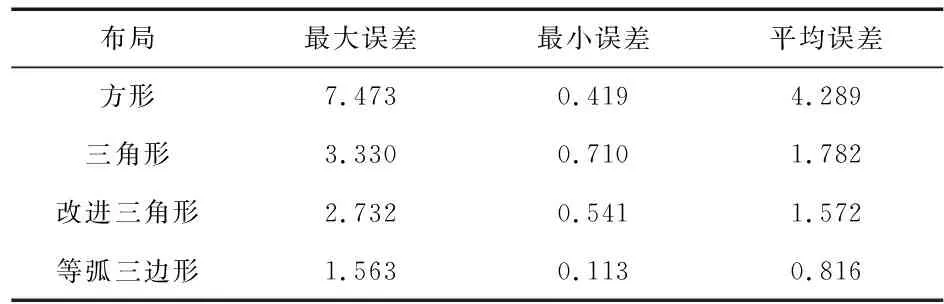
表1 4種布局最大、最小和平均誤差對比 m
得出如下結論:
1)4種定位布局中,等弧三邊形具有最好的定位精度,傳統三角形和改進三角形布局次之,方形布局最差。
2)改進三角形布局和傳統三角形布局在前5個點的測試中,定位精度差別不大;在后5個點中,改進三角形布局較傳統三角形布局有所提高,其主要原因是多增加了幾個節點。比較2種布局的10個待測點,改進三角形布局較傳統三角形布局,平均定位精度提高了12 %。
4 結束語
通過對RSSI與距離的關系分析,得到距離越遠RSSI越不穩定,基于對數衰落模型的距離容錯率越來越低,測距誤差越來越大。為了利用測距精度較高的信號,提出了等弧三邊形定位算法。該算法相對傳統方形布局、傳統三角形布局和改進三角形布局有更優的定位效果。本文算法不僅能有效提高定位精度,而且能合理控制節點成本,適合大范圍推廣。
