基于正弦脈寬調制的諧振加熱頻率跟蹤研究*
2018-08-07 09:03:28巫付專彭圣王耕
電測與儀表 2018年8期
關鍵詞:系統
巫付專,彭圣,王耕
(中原工學院電子信息學院,鄭州451191)
0 引言
感應加熱和其他加熱形式相比具有加熱效率高、速度快、可控性好及易于實現等優點,因此被廣泛應用于冶金、機械、電子等工業領域。為提高電源的利用率通常使感應加熱系統工作在諧振狀態,但在加熱過程中,由于溫度的變化被加熱材料的性能參數也會發生變化,從而引起系統固有諧振頻率發生變化。如果不能及時地調整加熱系統的輸出頻率,將使系統工作在非諧振狀態。為了保證感應加熱系統始終工作在諧振狀態必須采用頻率跟蹤技術。
文獻[1]通過檢測諧振回路的電流,經相位補償和過零比較,產生和諧振回路電流頻率相同的方波信號,控制PWM電路的驅動信號,使逆變器的工作頻率等于或略高于其諧振頻率,通過在逆變器前加入直流斬波來調節逆變器母線電壓,以實現通過調電壓而調功率的目的,增加了電路的復雜性,文獻[2-7]重點分析了數字鎖相環技術,但數字鎖相算法較為復雜、頻率的調節速度較慢。
傳統感應加熱電源側諧波含量高、功率調整范圍小。采用AC/DC/DC/AC拓撲結構,其中AC/DC采用單相不可控整流加Boost的結構,利用平均電流法使輸入側到達單位功率因數,實現功率因數校正(APFC)功能;DC/AC逆變部分根據諧振原理,利用DSP捕獲電流過零點測得電流與電壓的相位差,根據相位差的大小進行變步長控制,加快調節速度,使感應加熱系統工作在諧振狀態;通過調節SPWM的調制度,可在不增加硬件的情況下達到寬范圍地調節溫度的目的。
1 串聯諧振加熱系統結構與原理
1.1 串聯諧振加熱系統結構
串聯諧振加熱系統采用AC/DC/DC/AC拓撲結構,主要由單相不可控整流、Boost升壓斬波、單相逆變和RLC諧振電路組成,其中諧振電路由串聯電容C和等效阻感負載RL構成。具體如圖1所示。
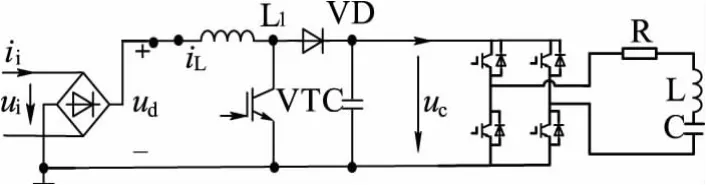
圖1 串聯諧振加熱系統結構圖Fig.1 Structure diagram of series resonant heating system
圖1 中單相不可控整流如不加控制將使網側諧波很大,可另外配套有源濾波設備抑制諧波[8-9],但增加了系統成本。本系統采用在不可控整流后加Boost的結構實現功率因數校正功能,提高效率同時減少對電網的諧波污染而無需另外配套其他設備;DC/AC逆變部分將直流逆變為交流,將該交流加與RLC諧振電路。
1.2 逆變和RLC諧振的結構及原理
1.2.1 單相全橋逆變電路
通常逆變電路為了降低諧波常采用SPWM調制。采用SPWM調制可以降低諧波,使DC/AC逆變部分輸出正弦波,使電路能準確的工作在諧振狀態。但與輸出方波控制相比采用SPWM開關管頻率變高會使系統損壞增大。對單相逆變電路采用單極性調制可以適度降低開關管頻率[10]。單極性SPWM的特點是:開關次數少、損耗小和效率高。
1.2.2 RLC 諧振原理
由電工原理可知RLC串聯諧振電路振蕩頻率f0為:
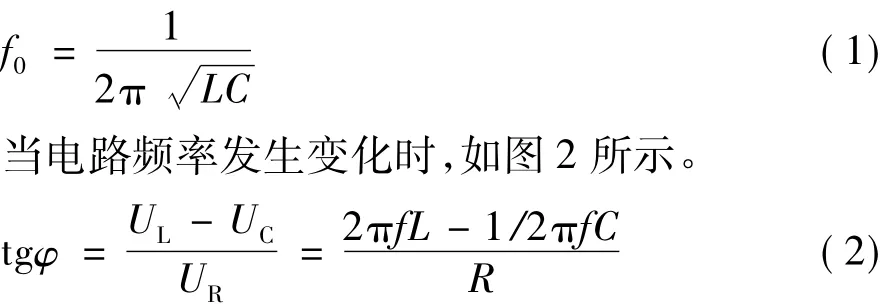
由式(2)可知頻率不同時相位差也不同,由圖2(c)可知相位差越大,其頻率離諧振頻率點越遠。
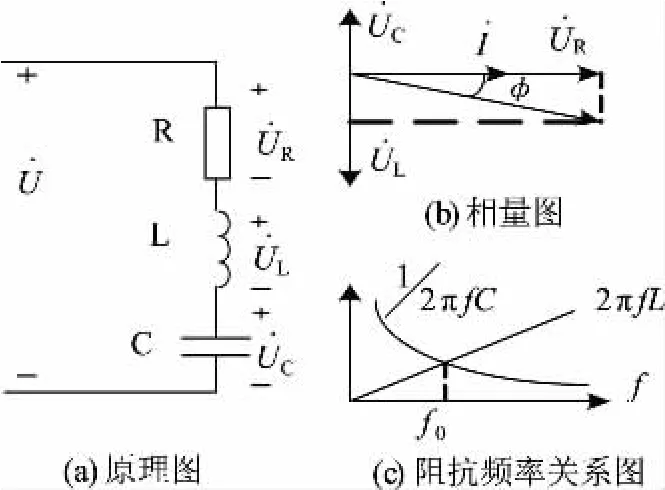
圖2 串聯諧振原理分析圖Fig.2 Analysis diagram of series resonance principle
當電路發生諧振時,電路為阻性,即電流與電壓同相;電路中電流最大,輸出的功率也最大;電容和電感上的電壓相等且有可能大于電源電壓等。根據諧振電路的特性,判斷電路是否處于諧振方法有:通過檢測電流電壓相位是否相同進行判斷;檢測電容和電感上的電壓是否相等;輸出功率是否最大等進行判斷。這幾種判斷方式硬件電路都比較復雜。
加熱電路由于負載溫度的升高,其感值也發生變化,從而導致振蕩頻率也隨負載溫度的變化而變化。若要使加熱電路始終處于諧振狀態,逆變器輸出的頻率也要隨之變化。本系統的DC/AC逆變部分采用頻率跟蹤技術,使感應加熱系統工作在諧振狀態。
1.3 頻率跟蹤及控制策略
1.3.1 頻率跟蹤
當加熱工件溫度發生變化時,其等效電感也將隨之變化,導致電路處于非諧振狀態,頻率跟蹤技術用于解決該問題。頻率跟蹤需要檢測電壓與電流兩者之間的相位差然后進行控制,使電路始終處于諧振狀態。與其他并網逆變不同如文獻[11]所述,由于逆變器輸出電壓是由逆變器本身主動控制產生,即輸出電壓過零處是已知的,可采用電壓過零處判斷電流信號是否為零進行頻率跟蹤;也可采用硬件的過零比較電路測得電流的過零點。第一種方法為保證采集的電流精度,需增加濾波電路,這樣將導致較大相位滯后。所以本文采用第二種方法測得電流過零點,即將電流信號通過硬件過零比較電路,然后利用基于DSP28335的捕獲功能測得電流過零的時刻,與SPWM起始的時刻作差得到電流和電壓的相位差,依此調整SPWM的頻率對加熱系統進行頻率跟蹤。調整SPWM頻率時,根據相位差的大小進行變步長控制,加快調節速度,減小震蕩,使感應加熱系統工作在諧振狀態。
當加熱系統參數隨溫度變化不是太大時可采用同步調制,當加熱系統參數變化較大時可采用分段調制。對于同步調制即載波fc和調制波fr之比N保持不變。在同步調制方式中fc變化時N不變,在調制波一周期內輸出脈沖數固定。
利用不對稱規則采樣法生成SPWM波,即在三角波的頂點和底點各個進行一次采樣,由此在一個載波周期Tc內采樣兩次使得輸出的脈寬波變化更接近于正弦波的變化規律,且諧波畸變率也大大降低[10]。其脈寬如式(3)所示:

ton=ton1+ton2(3)
式中M為調制度;N為調制比;i為SPWM指針,每一次中斷產生一個PWM波,對于不對稱規則采樣法每次中斷i值加2。
基于DSP28335控制而言,當采用同步調制時,可通過調節EPWM模塊中斷周期寄存器的值TPR對頻率進行調節。利用捕獲單元對電流過零點進行捕獲判斷,在產生每個PWM波的中斷周期內,監測捕獲中斷標值為是否為1,當檢測到中斷標志時,可計算電壓與電流之間的相位差,根據相位差的大小,變步長調節載波的周期寄存器TPR的值,提高了頻率跟蹤速度,減小頻率跟蹤時的震蕩。
假設第i=t次捕獲到電流過零標志,而SPWM過零時i=0,則電壓與電流之間的相位差為:

式(4)中N為調制比。需要調節的步長為:

式(5)中k為變步長系數,針對諧振加熱系統,不同溫度時電感與等效電阻都在變化,因此k不是常數,可采用仿真加實驗方法建立一個對應的數據庫,在編程時進行調用。具體控制如圖3所示。
1.3.2 系統控制策略
本系統的溫度控制方法為:采用給定溫度與檢測溫度作差進行PI調節,其輸出控制SPWM的調制度,形成閉環調節被加熱物體的溫度,可達到寬范圍地調節溫度的目的。
同時在加熱系統中為提高電源的利用率,通過頻率跟蹤使其一直處于諧振狀態。其原理如圖4所示。

圖3 頻率跟蹤算法圖Fig.3 Frequency tracking algorithm
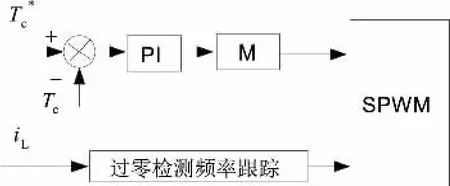
圖4 采用SPWM控制框圖Fig.4 SPWM control block diagram
2 系統軟硬件實現
2.1 系統組成
系統組成如圖5所示,前級功率因數校正部分,可采用專用控制芯片UC3854或其他控制器完成其控制功能。選擇不同的控制參數可使功率因數達到0.99以上,輸入電流波形畸變率小于5%,滿足國家標準對諧波的要求。同時當輸入電壓變化時,該電路仍可使輸出電壓保持穩定[10]。
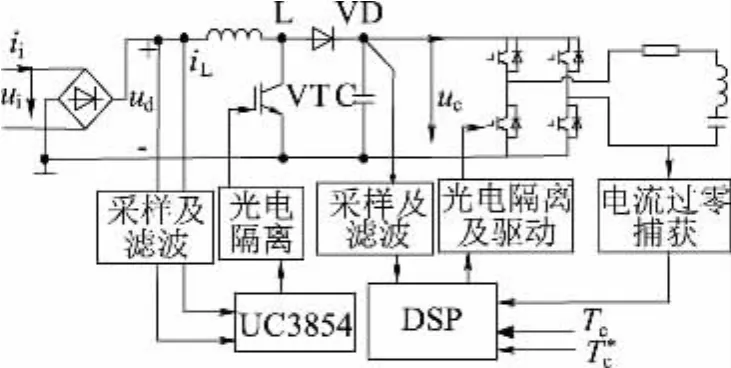
圖5 系統組成框圖Fig.5 System composition block diagram
后級為逆變輸出部分,其頻率跟蹤采用TMS320F28335型號的DSP控制芯片產生PWM波控制電路中的開關管。利用DSP捕獲電流過零點測得電流與電壓的相位差,根據相位差的大小進行變步長控制,快調節速度,減小震蕩,使感應加熱系統工作在諧振狀態。檢測溫度與給定溫度做差經PI調節,改變SPWM的調制度使逆變器輸出電壓的大小改變,從而控制相應功率的輸出,達到調節溫度的目的。
2.2 電流過零捕獲電路的設計
霍爾傳感器較互感器有精度高、線性度好、動態性能好、工作頻帶寬、測量范圍大和過載能力強等優點,為提高電流過零捕獲的精度選用電流霍爾傳感器對電流進行采集[12]。圖6為電流過零比較電路,由霍爾檢測的電流信號由XCAP1端輸入,經過零電路比較后輸出相應的同步方波信號,為進一步防信號干擾,輸出的方波再經過光隔電路后由COM1端輸出給DSP捕獲端CAP。

圖6 電流過零比較電路Fig.6 Current zero-crossing comparison circuit
圖6 中過零比較電路是以LM339N芯片為核心構成的遲滯型過零比較器,通過R9引入正反饋,其中電壓閾值Uth為:

若選取R22=12 kΩ,R9=1 MΩ,比較器輸出電壓Uo為±15 V,則由式(5)計算閾值電壓Uth約為±0.2 V。
按以上參數對遲滯型過零比較器在TINA軟件中進行仿真,其中輸入信號峰值為4 V、50 Hz的正弦波,其上疊加幅度為0.19 V的干擾信號,其輸出波形為方波。圖7(a)為遲滯型過零比較的波形圖,輸出信號過零處無抖動;圖7(b)為去掉R9后得到的波形圖,輸出信號過零處有抖動。所以遲滯型過零比較器使輸出信號避免過零處的抖動,提高了電路的抗干擾能力。
遲滯型過零比較器提高了抗干擾能力,但也會引起相位的滯后。
利用Uth可求得遲滯型過零比較器引起的相位延時。但實際電流隨不同加熱工況的不同其大小也在變化,所以只需增加AD采集實時計算輸入電流的大小即可得到遲滯型過零比較器引起的相位變化。將求得相位延遲加入式(5)即可補償過零比較器引起的相位延時。
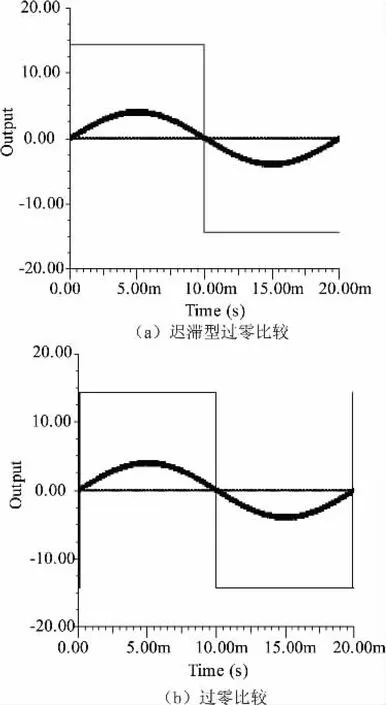
圖7 過零比較波形圖Fig.7 Zero-crossing comparison waveform diagram
2.3 系統軟件流程

圖8 系統軟件流程圖Fig.8 Flow chart of system software
基于DSP28335實現的流程如圖8所示。主要有四部分組成,包括主程序、兩中斷服務程序和AD子程序。其中主程序主要完成系統初始化;中斷服務程序1主要完成SPWM波的產生和變步長頻率跟蹤功能;中斷服務程序2主要檢測電流是否過零,然后決定標志為是否置位(由于較為簡單流程圖沒有給出);溫度調節子程序主要完成AD采集及溫度調節功能。
3 實驗結果分析
根據上述分析搭建了樣機實驗電路,控制器為TMS320F28335;檢測電路采用電流霍爾,開關器件選用集成了驅動電路的FSAM30SH60A,控制器與開關器件之間加入6N137光隔電路。主電路電路參數為:R=6 Ω 電感分別為 L=7.8 mH 和 L=8.7 mH;C=10 μF。實驗結果如圖9所示。

圖9 頻率跟蹤波形圖Fig.9 Frequency tracking waveform diagram
圖9 (a)、圖9(b)分別為 L=7.8 mH 和 L=8.7 mH時頻率跟蹤的效果波形圖,其中電壓為50 V/每格,電流為5 A/每格。理論諧振頻率L=7.8 mH時為570 Hz,實測頻率570.5 Hz,電流為 4.26 A;理論諧振頻率 L=8.7 mH 時為539.8 Hz,實測頻率 578.1 Hz,電流為 4.27 A。從跟蹤效果看在電感發生變化時頻率跟蹤準確,電流基本保持不變,即電路處于諧振狀態。
4 結束語
采用AC/DC/DC/AC拓撲結構,前級采用單相不可控整流加Boost的結構實現APFC功能,提高效率同時減少對電網的諧波污染;DC/AC逆變部分利用DSP捕獲電流過零點測得電流與電壓的相位差,根據相位差的大小進行變步長控制,加快調節速度,減小震蕩,使感應加熱系統工作在諧振狀態;通過調節調制度調節輸出的功率,達到調節溫度的目的;基于TMS320F28335等搭建了樣機電路對所采用的方法進行了驗證。實驗結果表明,隨著電感變化時逆變器輸出頻率能及時跟蹤,使電路始終處于諧振狀態,跟蹤頻率與理論頻率的誤差小于1 Hz。從而驗證了所采用的控制算法可行性,為實際感應加熱系統的設計提供了一種可行的方法。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32