集裝箱起重機工作模型優化和多目標路徑的實現
2018-08-09 02:49:20謝京強
中國設備工程 2018年14期
關鍵詞:優化
謝京強
(上海振華重工(集團)股份有限公司,上海 200125)
集裝箱的裝載運輸量的不斷加大,給碼頭的工作帶來了很大的壓力,因此,為了實現高效率工作,碼頭在集裝箱裝卸工作中增加了大量的工作人員,還增加了一定的裝卸設備,但是這樣的方式也大大的增加了碼頭的運營成本。為了能夠更好的保證集裝箱裝卸運輸事業的效益,解放勞動力,自動化生產的實現變得十分迫切。實現自動化,不僅能夠有效的解放勞動力,降低運營成本,還可以有效的保證人員的生產安全,提升港口碼頭的綜合競爭力。
1 集裝箱起重機裝卸工作模型
在當前的集裝箱起重機裝卸工作中,人是其中最主要也是最直接的勞動力,現場的裝卸環境十分惡劣,給操作人員的人身安全帶來了很大的威脅。除此之外,起重機在集裝箱裝卸工作單調而重復,因此,長時間的操作會使人的疲勞感增加,工作效率下降,甚至有可能會發生危險。因此,希望可以實現集裝箱起重機的自動化操作,這樣既可以有效的解放人力,提高工作效率,還能夠有效的保證工作的安全性。機械路徑問題的優化,是實現起重機自動控制的重要環節,也是整個優化工作中最具挑戰的環節。
在集裝箱的裝卸操作中應用最優路徑規劃,在目前的相關研究中是很少提到的,相關工作的開展大多是以經驗為基礎而展開的,對于相關行業的理論知識和專業技術的關注度和重視程度不夠,實際工作中,港口的環境十分復雜,并且不同的港口之間環境也有一定的差異,對于不同的港口單位來說,起重機不同,各起重機的性能也有較大的差異,此外,對于不同的工作場所而言,集裝箱的位置、機械來回操作路徑之間都有著一定的差異。這些因素都是可能導致危險發生的隱患。因此,實現集裝箱起重機自動化工作,對現有的傳統方式進行優化,解決當前問題是直接有效的方式。現有的集裝箱裝卸操作方式包括“門框式”裝卸操作、經驗操作和日本安川橋吊集裝箱裝卸操作三種。
2 系統模型優化與改進
在當前世界各地集裝箱運輸事業的發展給碼頭工作帶來了極大的壓力的環境下,為了更好的保證集裝箱裝載和運輸的效率,推動自動化碼頭的普及和廣泛應用,使世界各地的集裝箱裝卸和運輸事業能夠均衡發展,滿足碼頭運輸的需求,自動化碼頭的普及和升級工作正在積極進行,這樣就可以有效的減少操作人員數量,降低運營成本,同時還可以有效的提高工作效率,提升港口碼頭的綜合競爭力和工作能力。
對現有集裝箱起重機裝卸系統的優化有以下兩個發展方向。
2.1 集裝箱自動化碼頭
集裝箱自動化碼頭,指的是在集裝箱裝卸工作中實現自動化,應用自動化設備和相應的管控系統,實現集裝箱裝卸的自動化,以自動化設備逐漸代替人工的搬運和裝卸工作,從而有效的實現解放生產勞動力、降低人員成本和運營成本、提高工作效率的目的。在世界上,集裝箱自動化碼頭已經在多個國家投入使用。
2.2 高效智能型立體裝卸集裝箱碼頭
目前,高效智能型立體裝卸集裝箱碼頭的研發和使用是為了徹底的擺脫傳統集裝箱起重機裝卸的方式,實現碼頭集裝箱裝卸自動化的同時,努力提高系統運行的高效化和智能化,推動集裝箱裝卸事業的發展。高效智能型立體裝卸集裝箱碼頭改變了傳統裝卸方式中采用內燃機提供驅動力的運輸方式,實現了集裝箱自動化軌道電驅動,這大大的解放了人力。下圖1所示為高效智能型立體裝卸集裝箱碼頭平面圖。
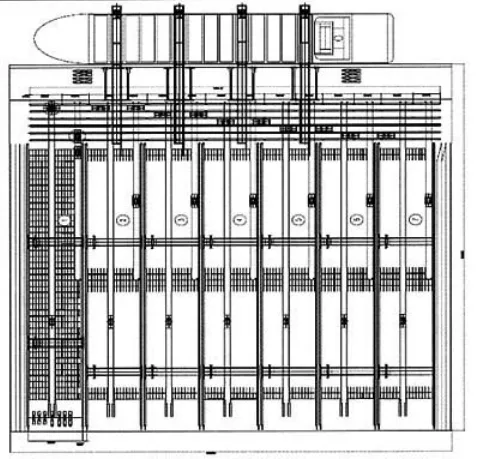
圖1 高效智能型立體裝卸集裝箱碼頭平面圖
3 裝卸操作路徑規劃多目標問題研究
在集裝箱的裝卸工作中,安全距離一直都是一個不容忽視的問題,為了提高工作的安全性,避免事故的發生,“門框式”的集裝箱裝卸方式在實際工作中被認可。因此,本文在對多目標問題進行研究和分析時,為了人員操作安全的考慮和實際操作的便利性,也會對安全距離問題予以充分的關注。
最優化的設計,指的就是在切實可行的前提下,在設計空間中查找目標函數最優解的問題。在集裝箱裝卸運輸工作中,存在著多個需要考慮的因素,因此將裝卸操作路徑的優化問題作為多問題解決考慮。
自上世紀60年代開始,集裝箱裝卸工作中的多目標優化問題受到了廣泛的關注,和單目標優化不同的是,多目標的優化大多是找到一個折中解,也就是說,在需要考慮的所有目標函數中,搜索對于所有函數而言最優的一個解,這個解可以解決所有目標函數問題,并且不存在優于這個解的其他解。
傳統的多目標優化的方法,是建立在權重的基礎上的,在開始嘗試進行多目標優化時,以權重為基礎建立起來的多目標優化方法得到了廣泛的應用,這一方法的主要優點在于可以將多目標優化問題轉化成單目標優化問題,也就是將復雜的問題簡單化,這樣更方便我們的求解。
進化算法是一種模擬自然進化過程的隨機優化方法。自上世紀50年代開始,這一算法開始被研究,在80年代形成成熟的算法。進化算法在后來的發展中形成了三個主要的分支:遺傳算法、進化策略和進化規程。這些分支在算法上存在著一定的細微差別,但其發展的根源則都是來源于生物演化過程的思想和原理。進化算法在多目標問題優化中有著十分明顯的優勢。
VEGA算法也可以說是目標分解算法,它是對我們現有的目標進行分解,從而得到各個小的分目標,再對這些小的分目標分別賦予一個函數,這些新的目標函數在其對應的群體中求得最優解,從而組成一個新的多目標群體,然后再對這一多目標群體進行最優解的探究,最后經過多輪的分解和綜合求解的過程,算出這個問題的非支配解。這一方法對目標函數的要求不是十分的嚴格,可以處理如不連續、多維的、高度非線性的多目標問題,這一算法的提出,也引起了廣泛的研究和應用。
多目標優化問題的難點在于,眾多目標之間可能存在一定的沖突,因此,想要尋求多目標的最優解也就有了一定的難度,在多目標問題的研究中,對于某一問題的最優解,在其他問題上卻不一定是最優的,甚至還可能會是最差的解。可以說,在對多目標進行研究分析時,最優解的尋找并不能通過對各個單目標的解進行簡單的對比分析而得到。在多目標問題中,一個解的得出或者說存在,并不能保證所有的問題都處于最優狀態,想要尋求多目標的最優解,只能說是找到一個折中解,在所有的多目標問題共同作用時取到最大的好處和優勢。
4 結語
本文在對現有的集裝箱起重機裝卸工作介紹的基礎上,對自動化集裝箱碼頭和高效智能型立體裝卸集裝箱碼頭進行了介紹,這兩種自動化碼頭建設是對傳統方式的優化。通過本文中的分析我們可以發現,優化后的集裝箱裝卸方式有利于生產和運輸事業。
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
能源工程(2022年1期)2022-03-29 01:06:28
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
今日農業(2020年16期)2020-12-14 15:04:59
消費導刊(2018年8期)2018-05-25 13:20:08
家庭影院技術(2018年4期)2018-05-09 07:07:41
電子制作(2017年20期)2017-04-26 06:57:45
