水電機組振動監測與故障診斷系統的設計與實現
2018-08-09 02:49:22王富超
中國設備工程 2018年14期
王富超
(云南華電金沙江中游水電開發有限公司,云南 麗江 650228)
水電機組中單機容量的不斷提升以及“無人值班”的推廣實施,在很大程度上對發電機組的檢修方面提出了更高的要求,以往傳統的維修體制已經難以滿足現代化的維護需求,需要于現代化設備和技術相結合,依靠信息技術從根本上解決設備維修中存在的不足問題,使設備的運行效率得到顯著提升。
1 水電機組振動監測與故障診斷系統構成
1.1 實時監測
在系統的實施監測模塊中,主要是對測點的分布情況、數據采集、實時顯示等方面進行監測。在測點的布置方面,需要選擇一些較為典型的測點,不但要考慮到監測機組中的最大振動、擺動部位等,還需要體現出機組的工作量、工作情況等環境參數,為后續的故障推測提供極大的便利。在水電機組的運行中,可能會受到現場較強的電磁波影響,使測量出的擺度、振動等結果受到干擾信號的影響,使其準確性產生不利影響,對此,需要對信號濾波中的干擾信號進行過濾。
1.2 信號分析
對振動信號進行分析主要包括頻域、時域、時差域、空間幾個方面。在頻域方面,對整個周期的數據進行采集,使FFT進行變換,通過頻譜分析的下限要求,能夠得出低頻的水力因素;通過頻譜分析的上限要求,能夠得出高頻電氣因素。在時域信號方面,通過對實時數據變化圖進行顯示,能夠對部分數據進行分析和統計。在時差域方面,通過對變量之間的變化情況進行描述,能夠對自變量產生的影響進行分析,因此在一定程度上能夠反映出故障產生的原因。在相位分析方面,主要包括不同測點之間信號產生的相位差以及單個測點信號在不同的時間變化下產生的相位差。
1.3 故障診斷
在人工智能領域當中,專家系統屬于其中活躍度較強的部分。在監測系統當中,規則庫與推理機二者處于相互分離的狀態,也就是一旦某個專業的數據庫或者推理機制被建成以后,該系統便能夠對該領域中的不同情況進行處理,只需要對相應的知識元進行修改即可,其他推理機制可以不隨之發生改變,由此展示出系統具有強大的靈活性與適應性。主要的推理步驟為:首先,專家系統通過數據庫查找到故障征兆,將數據轉變成便于推理機理解的參數,主要包括均值、偏度、方差、峭度、頻率分量值等,然后利用正反雙向混合的方式進行推理,按照前提條件進行推理,如若推測出的結論不具備確定性,考慮到運行中的歷史特征,也就是對歷史數據進行調用。例如振動振幅能夠隨著轉速的改變而發生相應的改變,然后在逐步向下推理,如若得出的結論不正確,需要將一些用戶信息補充其中。例如將軸心軌跡圖的形狀補充其中,以此來完善推理過程,直至最終得出故障產生的原因。
2 振動監測與故障診斷系統設計
2.1 系統總體設計
在本文所研究的系統當中,主要由上位機和下位機構成,總體框架如圖1所示。
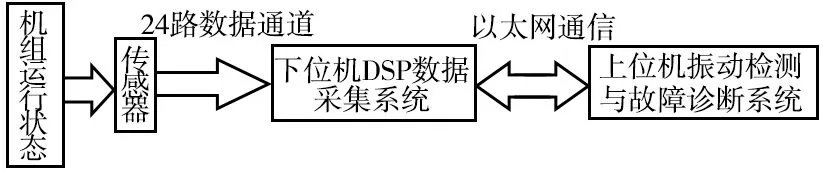
圖1 系統總體框架
根據所測量信號的不同,可以將傳感器組劃分為速度傳感器、位移傳感器、加速度傳感器等,按照實際需求,將其安裝在水電機組的各個部位。傳感器組能夠對水電機組的相關數據信息進行采集,包括壓力脈動、振動、擺度、有功功率等,并且將上述物理信號轉變為電壓、脈沖信號、電流等多種形式,然后將其傳輸給下位機。
上位機軟件系統主要包括振動監測與故障診斷兩個模塊,在振動監測模塊當中,主要對機組當前的振動狀態進行實時監測,包括軸心軌跡、波形顯示、棒圖等;故障診斷模塊中能夠通過對機組振動特征的監測,確定出故障的產生類型,進而對故障問題進行分析。在下位機系統中,主要以TMS320F2812為主控芯片,對24路模擬信號與8路開關量進行采集,所采集到的信號首先經過調理電路濾波進行擴大,然后經過A/D裝換成數字信號,最終傳輸給上位機。
2.2 系統的硬件設計
將數據采集系統與水電機組部件相互關聯,對機組在運行過程中的擺度、振動、壓力、油壓、轉速等信號進行收集,系統主要包括A/D模塊、DSP模塊、D/A模塊、CPLD模塊等,結構框架如圖2所示。
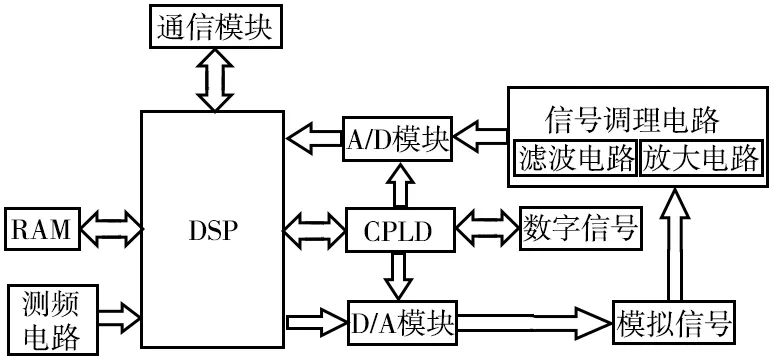
圖2 數據采集系統硬件結構框架圖
(1)A/D模塊。在A/D模塊中能夠完成模式轉換,轉換的過程包括量化編碼與采樣,在本文所研究的系統當中,A/D轉換芯片為MAX1168芯片,該芯片具有8通道模擬輸入,分辨率為16位、性能較高、功耗較低,能夠充分滿足系統在采樣與轉換速率方面的要求。
(2)通信模塊。該模塊主要功能是實現數據間的通信,該系統采用以太網通信方式,通過TCP協議實現數據傳輸,主要芯片為W1500網口芯片,具有較強的穩定性能、成本較低。支持10/100Mbps數據傳輸,在內部集成了IP協議,使用戶的開發流程得到有效的精簡,同時也降低了DSP的負擔。
(3)DSP模塊。屬于該數據采集系統的核心內容,主要功能是對系統進行有效的控制、數據處理等,主要由DSP芯片以及外圍電路構成。該系統采用TMS320F2812作為主芯片,具備三個獨立的32位的CPU定時器,56個獨立編程的GPIO引腳,工作主頻可達150MHz。在外圍支持電路中,包括復位電路、時鐘電路、電源電路等功能,能夠有效的輔助DSP,向其中提供電源、復位信號、時鐘信號等等。
2.3 系統的軟件設計
本系統采用模塊化編輯,主要開發平臺是C++,具有多種圖形顯示功能能,夠對機組振動狀態進行實時監測,并且對簡單的故障問題進行判斷,系統的軟件結構見圖3。
2.3.1 數據通信模塊
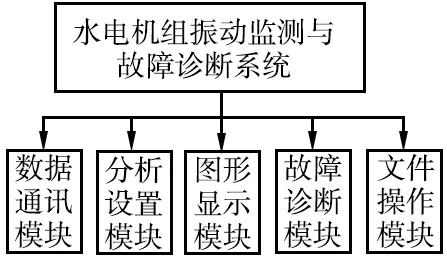
圖3 數據采集系統軟件結構框架圖
該模塊主要作用是實現上位機與下位機之間的通信與傳輸。本系統采用以太網通信,通過TCP協議進行數據傳輸,保障數據傳輸的可靠性。在IP協議當中,共包括兩種傳輸協議,即用戶數據報協議UDP與傳輸控制協議TCP,其中TCP協議主要是針對于數據連接方面,并且具備超時重傳、擁塞控制等功能,能夠有效提升數據傳輸中的可靠性。而UDP協議主要是針對非連接,更加側重于數據傳輸的時效性。在C++平臺當中,Internet組件中對Winsock編程接口進行封裝,為網絡編程提供便利,其中ServerSocket控件代表了服務器,通過對該控件屬性進行設置能夠實現通信端口等基本設置,通過對時間事件進行響應,能夠將服務器與客戶端相連接,實現請求、數據傳輸、斷開等功能。
2.3.2 分析設置模塊
該模塊主要功能分為以下幾個方面。
(1)“通道設置”主要是對圖形類別、通道名稱、窗函數類別、校正譜線數等。
(2)“機組轉速信息源”主要是對機組轉速的獲取方式進行選擇,通常情況下,通過獲取鍵相信號來獲取到機組的轉速,在本文所研究的系統中,主要通過“DI4”對通道信號進行測量。
(3)“FFT點數”主要對每次FFT計算點數進行選擇,其中“自定義”代表由用戶所自定義FFT計算點數,“自動”代表的是由系統按照機組轉動周期對數據點數進行計算。
(4)“顏色設置”主要用來對波形的顏色進行調整。對于不同類型的圖形來說,用戶可以選擇多種顏色,也可以直接使用系統缺省值。
2.3.3 故障診斷模塊
先對振動信號頻譜進行分析,將其中各頻率分量幅值進行提取,計算各個幅值的隸屬度。通過人機對話的方式獲取系統各個部位振動情況。然后將上述信息所對應的模糊關系矩陣相乘,在多元擴展原則的基礎上,對振動故障的隸屬度值進行計算。最后根據隸屬度值對故障類型進行判斷。
3 結語
綜上所述,振動故障屬于水電機組中十分常見的故障類型,對機組的正常穩定運行構成嚴重威脅,對水電站的經濟效益產生較大的不利影響。對此,應對水電機組的振動故障進行有效的監測,并且通過C++開發平臺,對機組振動監測與故障分析系統進行開發,使其能夠保障水電機組的安全順利運行。
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
天天愛科學(2020年6期)2020-09-10 07:22:44
汽車維修與保養(2019年7期)2020-01-06 03:30:42
數學物理學報(2017年6期)2018-01-22 02:26:40
汽車維護與修理(2016年10期)2016-07-10 08:17:41
重慶工商大學學報(自然科學版)(2015年10期)2015-12-28 07:43:58
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維護與修理(2015年2期)2015-02-28 12:15:39
計算物理(2014年2期)2014-03-11 17:01:44
振動、測試與診斷(2014年5期)2014-03-01 01:14:21
