基于GPS的集裝箱碼頭設備防撞保護技術探討
2018-08-09 02:49:26鄒國亮
中國設備工程 2018年14期
鄒國亮
(大連集裝箱碼頭有限公司,遼寧 大連 116601)
隨著經濟全球化和區域經濟合作的快速發展,港口的作用已逐步轉變為大型運輸樞紐和物流中心,特別是集裝箱港口在資源配置和物資流通中發揮著越來越重要的作用。碼頭岸線資源有限,隨著箱量的增加,碼頭不斷通過增加裝卸設備數量和提高碼頭設備的運行速度來提高產能。而隨著數量的增多和速度的提升,設備間的交叉作業加劇,同時加之人員疲勞駕駛的原因,易導致設備碰撞事故發生。
1 設備間碰撞原因分析
傳統集裝箱碼頭的作業設備主要為岸橋、場橋和集卡,岸橋負責船舶的裝卸,場橋負責場區集裝箱的裝卸,而集卡是負責水平運輸的。集裝箱碼頭設備碰撞主要發生在岸橋與岸橋,集卡與岸橋,集卡與場橋,場橋與場橋之間。設備間碰撞原因主要是以下幾種原因導致:第一,設備自身的防撞限位失效,導致防撞保護功能缺失;第二,因觀察視線的盲區導致的設備碰撞;第三,人員疲勞駕駛導致設備碰撞事故。從碰撞原因看有設備本身的原因,現場實際環境的原因,以及人員精神狀態的原因。目前的設備防撞形式設計主要是靠人控制設備避讓和設備接近報警的設計形式,但隨著設備交叉頻率的增加和人員作業負荷的增加,人員主觀防護意識有時會減弱,造成碰撞事故發生,甚至造成嚴重的人員傷亡事故。圖1為設備碰撞照片。

圖1 設備碰撞照片
2 技術背景
GPS導航系統是以全球24顆定位人造衛星為基礎,向全球各地全天候地提供三維位置、三維速度等信息的一種無線電導航定位系統。它由三部分構成,一是地面控制部分,由主控站、地面天線、監測站及通訊輔助系統組成。二是空間部分,由24顆衛星組成,分布在6個軌道平面。三是用戶裝置部分,由GPS接收機和衛星天線組成。民用的定位精度可達10米內。
GPS定位分為單點定位和相對定位(差分定位)。單點定位就是根據一臺接收機的觀測數據來確定接收機位置的方式,它只能采用偽距觀測量,可用于車船等的概略導航定位。相對定位(差分定位)是根據兩臺以上接收機的觀測數據來確定觀測點之間的相對位置的方法。在GPS觀測量中包含了衛星和接收機的鐘差、大氣傳播延遲、多路徑效應等誤差,在定位計算時還要受到衛星廣播星歷誤差的影響。在進行相對定位時大部分公共誤差被抵消或削弱,因此定位精度將大大提高。雙頻接收機可以根據兩個頻率的觀測量抵消大氣中電離層誤差的主要部分,在精度要求高,接收機間距離較遠時(大氣有明顯差別),應選用雙頻接收機。
GPS定位的基本原理是根據高速運動的衛星瞬間位置作為已知的起算數據,采用空間距離后方交會的方法,確定待測點的位置。如圖2所示,假設t時刻在地面待測點上安置GPS接收機,可以測定GPS信號到達接收機的時間△t,再加上接收機所接收到的衛星星歷等其它數據可以確定圖2四個方程式。GPS差分技術可使定位精度提升至厘米級。
3 設備防撞方案
現階段碼頭設備防撞主要以人員操作防護為主,限位防護為補充的防撞設計,設備對外部環境無感知。如果可以將所有設備統一到一個系統中進行防撞控制,將使得所有設備共同使用一個大腦,從而實現防撞保護。如果實現該方案,首先需要對設備進行精確定位,其次是對碼頭地理信息進行細致描繪,同時還需個平臺對所有設備的位置信息和運行趨勢進行統計分析,對可能發生碰撞的設備發出警報提醒和必要的干預。
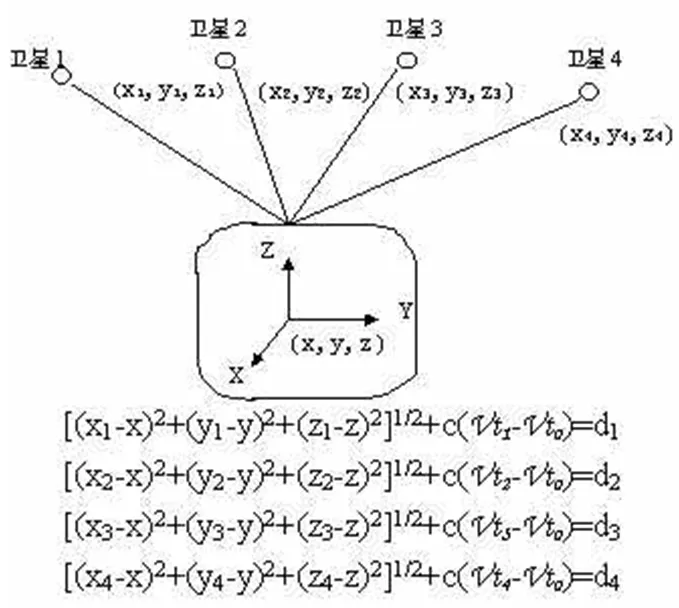
圖2
3.1 設備精確定位
使用差分技術進行設備精確定位。在設備上安裝GPS天線,天線需能夠接受兩種以上的定位信號,比如中國的北斗定位系統,美國的GPS定位系統,俄羅斯的GLONASS定位系統等,定位天線接收多系統信號,通過GPS天線對接受到的信號進行篩選,選擇信號強的GPS信號進行差分計算,從而提升設備定位的精確度的穩定性。GPS差分技術的關鍵是建立基準站,所有設備接受到的GPS信號與基準站信號進行比對,進行相對距離計算,得到各設備位置的相對信息,從而消除GPS的絕對誤差,提升定位精度。相對位置的精度主要取決于定位天線的精度,因此可以達到10mm。同時受基準站距離設備的距離影響,誤差會增加8ppm(每10公里誤差8mm),因此基準站不可設置太遠。以現在碼頭的規模,基準站可以保證在5公里范圍內,設備的定位精度應該可以達到20mm。GPS基準站主要功能為生成并播發差分改正數,差分信息通過無線數傳電臺鏈路播發出去;差分信號需要覆蓋整個設備作業區。基準站設備包括GPS基準站接收機、GPS天線和數字電臺及天線。
3.2 碼頭地圖繪制
碼頭地圖繪制方案,可采用碼頭設計時的圖紙進行地圖信息繪制,從而保證碼頭地圖信息的準確性。同時通過移動式定位天線對碼頭多個特征點進行定位測量,并將特征點與繪制的碼頭地圖信息進行精確匹配,進而得到準確的地圖信息,因為地圖的繪制也是基于DGPS系統,所以碼頭電子地圖信息的精度也可以達到20mm,從而得到精確的地圖。
3.3 防撞保護設計
通過對現場設備位置信息的獲取,借助碼頭網絡系統將定位信息傳輸至防撞保護的系統平臺數據庫中,數據庫對設備運行的位置、速度、方向等諸多信息進行運算分析,通過綜合判斷設備運行方向和與周圍設備或設施的距離來判斷發生碰撞的幾率,從而通過網絡提前向相關設備發出警報提醒,當碰撞幾率持續增加,達到警戒值時,系統向設備PLC發送指令,強行設備停機。
因有精確的碼頭地圖信息,所以也可以在系統中建立規則,如系統檢測出設備經過交叉路口時,系統可發出提醒,通知司機注意減速的避讓。針對特殊路段可以對設備的移動速度進行監控,超速報警并進行內部管理,對設備的安全行駛進行實時的監控,以此保證設備的使用安全。系統可以通過統計功能對港內設備的違章情況進行統計,并將統計結果發送至安全監察部門,作為考核依據,提升碼頭安全管理水平。
設備防撞系統需要數據庫支持,同時數據庫的數據處理速度也決定整個系統的效果,所以數據庫的選擇和系統的算法需要簡練,同時程序中避免多層的循環計算。可以對每個設備進行安全距離設定,只對進入安全距離內的設備進行防撞保護。因統計數據數量的原因,需根據設備數量選用適合的數據庫軟件。
4 項目的效益
通過GPS定位技術在集裝箱碼頭的使用,可以將傳統以人員觀測和處置為主的防撞防護形式,改為以系統監控和防護為主的形式。設備防護由單點的被動防護提升至整體設備的聯動式的防護形式,提升了集裝箱碼頭設備防撞保護的等級。
同時設備定位與碼頭地圖的綜合運用可實現為設備的運行管理,對速度的監控,對特殊位置的監控,有效地提升了現場的設備安全運行的管理,降低現場安全管理資源投入,實現24小時的實時監控管理。設備防撞系統的運用,結合碼頭已經實現的視頻監控系統,可有效地減少現場人員投入的同時,可大幅度的提升集裝箱碼頭現場的安全管理水平。
使用設備防撞系統進行碰撞防護,可以有效地避免因人員困倦和環境因素導致的碰撞事故的發生,杜絕碼頭內設備碰撞事故的發生,為碼頭節省大量的設備維修費。
5 項目的意義與推廣
使用GPS定位技術同時可以在碼頭中進行其他功能使用,如箱位管理系統和設備調度管理系統等等。設備防撞系統同時也可以在多設備、交叉作業多的場合進行推廣使用。
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
經濟技術協作信息(2018年22期)2019-01-19 03:00:18
電子制作(2018年11期)2018-08-04 03:26:08
家庭影院技術(2017年9期)2017-09-26 03:41:45
工業設計(2016年12期)2016-04-16 02:52:00
