基于CAN總線的多軸伺服控制系統的研究
2018-08-13 02:04:16李忠華
信息記錄材料 2018年9期
李忠華
(哈爾濱博實自動化股份有限公司 黑龍江 哈爾濱 150078)
1 引言
從現代化工業的具體發展來看,要實現更高的工業智能化和自動化,就必須提高控制系統的時效性,所以在工業控制系統中采用總線通訊方式是必然的發展趨勢,CAN總線作為一種成熟的國際標準化總線,在許多領域中都有應用,選用CAN總線作為多軸伺服控制系統的通訊方式,能夠有效的保證整個控制系統實時性的數據通訊,再搭配具有較高控制精度的多軸伺服控制系統組合應用,兩者可有效發揮各自的優勢,其組合應用能夠滿足工業設備中多數產品生產控制的需求,所以系統性的分析此種控制系統,并對其應用探討,是十分必要的。
2 系統硬件構成
基于CAN總線的多軸伺服控制系統在具體的工業自動化控制當中發揮著重要的作用,了解其具體的構成對于強化控制系統的應用來講具有重要的意義。圖1是其具體的系統結構圖和分析。
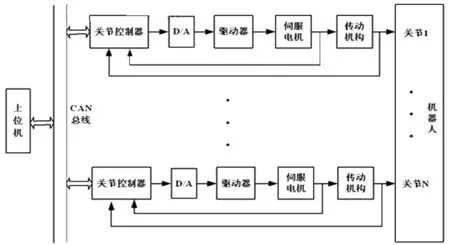
圖1 CAN總線的多軸伺服控制系統結構圖
2.1 CAN總線及其通訊適配卡
CAN是Controller Area Network的縮寫,是ISO國際標準化的串行通信協議。其具有以下幾個方面的優勢:第一是網絡節點之間的數據通信實時性強;第二是系統開發周期短;第三是已形成國際標準的現場總線,在各個領域均有應用,具有較強的市場競爭力。
在多軸控制系統當中使用CAN總線通訊,CAN總線通訊適配卡是必要的要素,一般在系統構建的時候就需要對其做具體的選擇。一般來講,為了實現系統控制性能的優化,在CAN總線通訊適配卡選擇時候需要選用高性能高性價格比的適配卡,使其能夠更加快速的實現主機在CAN總線上的數據連接,并減少對主機的通訊負擔,并能夠處理的用戶復雜的通訊任務。除此以外,CAN總線通訊適配卡還需配有光電隔離,對主機形成有效的保護,提高在復雜環境中的可靠性。
2.2 伺服控制器
伺服控制器是多軸控制系統當中的重要組成成員。伺服系統是具有反饋的閉環自動控制系統。它是由控制器、功率驅動裝置、反饋裝置和電動機組成的。對伺服機構進行位置、速度、轉矩的單項控制及組合控制。圖2是伺服控制器的具體結構。
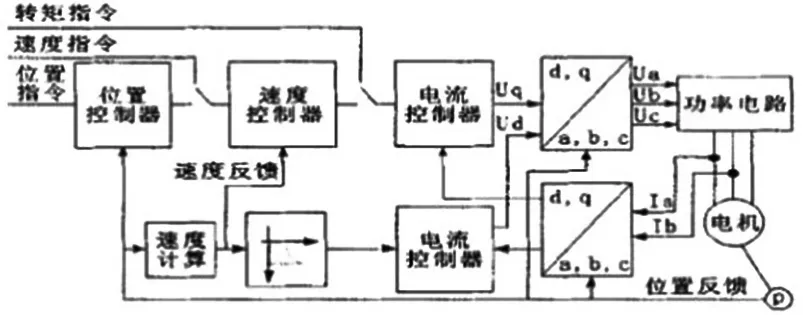
圖2 驅動器控制結構圖
2.3 主控制器
基于CAN總線的多軸伺服控制系統中的主控制器是整個系統的核心部件,在具體的主控制器選擇的時候,一方面其要具備對多個伺服的運動控制器的功能,能夠完成對運動點、點位的具體控制,速度控制模式等,另一方面要保證控制器內部裝置有可編程的邏輯控制器,利用可編程的邏輯控制器實現與外部邏輯信號的控制。簡言之,主控制器的功能發揮影響整個控制系統的效果,因此要實現主控制器具體功能、作用的分析完善。
3 系統軟件設計
為了實現CAN總線多軸伺服控制系統在具體利用中的效果發揮,做好相應的軟件設計十分的必要,而以下便是對具體設計的分析和討論。
3.1 CAN總線適配卡參數接口配置
在進行CAN總線通訊前,需要對CAN總線通訊接口做初始配置工作。控制器一般存在著兩種接口,即信號接口和參數接口。先進行參數接口配置,再進行信號接口配置。需要注意的一點是CAN通訊站接口所設置的波特率參數必須要和適配卡中設置的波特率參數具有一致性。
3.2 CAN總線適配卡和控制器的信號接口通訊
CAN總線的命令是通過預設的索引和子索引來讀寫控制器當中的參數指令完成的。在具體的實踐中,主控器將需要傳輸的命令進行下傳,這樣,下傳的數據結構會被寫入到CAN總線適配卡當中,CAN總線適配卡將數據傳輸到總線上,總線利用其包含數據信息以及目的地址等信息對CAN總線適配卡上的數據進行檢測,如果數據檢驗完整無損壞,則指令開始執行。簡單來講,CAN總線適配卡和控制器作為整個控制系統當中的核心部分,如果信號接口的通訊無法順利完成,那么系統的整體性工作便無法實現,這對于整個控制系統的利用來講影響顯著,所以在具體設計的時候,做好索引和子索引的科學預設,保證其在系統中的適配效果十分的必要。
3.3 任務分配
系統中的邏輯控制部分由主控器中的具有可編程功能的PLC或等同PLC功能的部件進行控制,而系統的運動控制部分由主控制器中的具有運動控制功能的獨立運動控制器或具有運動控制功能的部件進行控制,實現運動與邏輯控制的任務協調分工。具體來講,在基于CAN總線的多軸伺服控制系統當中,各個部件的功能和所承擔的任務是完全不同的,所以在軟件設計的時候需要對各個部件的具體任務做明確的分析,這樣,軟件設計可以綜合考慮各部件的功能和任務從而對其做協調設計,實現軟件的配合工作。
4 結語
對CAN總線多軸伺服控制系統進行研究分析,旨在更加明確的認識CAN總線多軸伺服控制系統的實際應用價值,從而為其推廣應用做好提供參考依據。因此,分析研究CAN總線多軸伺服控制系統的具體構成以及其在實踐利用中的軟件設計,這可以為CAN總線多軸伺服控制系統的專業化構建提供實踐性指導和幫助。
猜你喜歡
中華詩詞(2022年6期)2022-12-31 06:41:24
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
中國科技論壇(2017年7期)2017-07-25 08:49:53
媽媽寶寶(2017年2期)2017-02-21 01:21:24
國際漢語學報(2016年1期)2017-01-20 08:21:20
