基于BP神經(jīng)網(wǎng)絡(luò)的船舶主機(jī)能效狀態(tài)評(píng)估
2018-08-14 15:07:12陳偉南黃連忠張勇路通
中國(guó)艦船研究 2018年4期
陳偉南,黃連忠,張勇,路通
大連海事大學(xué)輪機(jī)工程學(xué)院,遼寧大連116026
0 引 言
對(duì)船舶主機(jī)而言,其能效狀態(tài)由主機(jī)的設(shè)定轉(zhuǎn)速、外界的海洋氣象狀況、船舶載重、船舶姿態(tài)等多個(gè)因素共同決定。在傳統(tǒng)的船舶管理模式中,船舶操縱人員大多依靠自身經(jīng)驗(yàn)對(duì)主機(jī)狀態(tài)進(jìn)行評(píng)估,并依據(jù)評(píng)估結(jié)果進(jìn)行操作。這種評(píng)估具有極大的不確定性,并降低了船舶的能源利用效率[1]。
劉伯運(yùn)等[2]和孫宜權(quán)等[3]針對(duì)車用柴油機(jī)的狀態(tài)評(píng)估進(jìn)行了分析。在船用柴油機(jī)方面,周根明等[4]運(yùn)用層次分析法對(duì)船舶主機(jī)的整體健康狀態(tài)建立了評(píng)估體系;孫峰等[5]基于數(shù)據(jù)挖掘技術(shù)提出了一種評(píng)估船用柴油機(jī)性能的方法。這些方法雖然對(duì)船舶主機(jī)的能效狀態(tài)評(píng)估進(jìn)行了研究,但并不能對(duì)航行中的船舶主機(jī)狀態(tài)進(jìn)行實(shí)時(shí)、迅速的評(píng)估。葉睿等[6]利用神經(jīng)網(wǎng)絡(luò)構(gòu)建了客滾船的主機(jī)油耗模型,但其輸入?yún)?shù)較為復(fù)雜,沒有進(jìn)行簡(jiǎn)化處理,同時(shí)其輸入?yún)?shù)僅為船舶航行時(shí)的船體姿態(tài)數(shù)據(jù),并未包含主機(jī)的運(yùn)行參數(shù),這也影響了模型的可靠度與準(zhǔn)確性。
基于此,本文將以狀態(tài)良好的船舶運(yùn)行記錄作為樣本,結(jié)合主成分分析法和反向傳播(Back-Propagation,BP)神經(jīng)網(wǎng)絡(luò)智能算法,構(gòu)建船舶航行狀態(tài)識(shí)別模型和主機(jī)油耗模型。在構(gòu)建油耗模型時(shí),將利用主成分分析法對(duì)模型輸入?yún)?shù)進(jìn)行簡(jiǎn)化,從而降低數(shù)據(jù)噪聲和網(wǎng)絡(luò)復(fù)雜性。此外,本文油耗模型的輸入?yún)?shù)還將包含主機(jī)的運(yùn)行參數(shù)和船舶的航行姿態(tài)參數(shù),用以更準(zhǔn)確地反映主機(jī)的能效狀態(tài)。本文構(gòu)建的航行狀態(tài)識(shí)別模型可用于識(shí)別船舶當(dāng)前的航行狀態(tài),而油耗模型可用于判斷船舶主機(jī)當(dāng)前的能耗狀態(tài)是否正常,從而對(duì)主機(jī)能效進(jìn)行智能、準(zhǔn)確的評(píng)估,可為智能船舶的能效評(píng)估研究提供一定的參考。
1 構(gòu)建模型
采用船舶的航行狀態(tài)模型和主機(jī)油耗模型對(duì)主機(jī)狀態(tài)進(jìn)行評(píng)估的流程如圖1所示。首先,采集船舶的實(shí)時(shí)運(yùn)行數(shù)據(jù),將其輸入到基于神經(jīng)網(wǎng)絡(luò)構(gòu)建的主機(jī)航行狀態(tài)識(shí)別模型中,運(yùn)用該模型識(shí)別出主機(jī)不同運(yùn)行數(shù)據(jù)對(duì)應(yīng)的航行狀態(tài);然后,選取正常航行狀態(tài)數(shù)據(jù),運(yùn)用主成分分析法對(duì)數(shù)據(jù)進(jìn)行預(yù)處理,用以降低后續(xù)計(jì)算的復(fù)雜度,加快神經(jīng)網(wǎng)絡(luò)的收斂速度并減小誤差;接著,將處理后的航行狀態(tài)數(shù)據(jù)輸入到基于神經(jīng)網(wǎng)絡(luò)構(gòu)建的主機(jī)油耗模型中,得出主機(jī)的功率、轉(zhuǎn)速、油耗等參數(shù);最后,將主機(jī)的實(shí)際油耗值x2與理論油耗值x1進(jìn)行實(shí)時(shí)對(duì)比,得到油耗殘差值δ,即可判斷主機(jī)當(dāng)前的運(yùn)行狀態(tài)是否正常。
1.1 目標(biāo)船及數(shù)據(jù)
本文的船舶實(shí)時(shí)運(yùn)行數(shù)據(jù)均來(lái)源于某目標(biāo)船——30萬(wàn)噸級(jí)遠(yuǎn)洋礦砂運(yùn)輸船。該船總長(zhǎng)327 m,型寬55 m,型深29 m,設(shè)計(jì)吃水21 m,航速14.5 kn,載重 298 000 t,主機(jī)型號(hào)為 MAN B&W 6S80MC-C,額定功率為22 360 kW,額定轉(zhuǎn)速為73 r/min。
通過(guò)船載傳感器進(jìn)行數(shù)據(jù)采集工作,目標(biāo)船的狀態(tài)參數(shù)如表1所示。其中,風(fēng)速分解為沿船舶航行方向(X方向)和垂直于航行方向(Y方向)2個(gè)風(fēng)速,并分別以船艏來(lái)風(fēng)和右舷來(lái)風(fēng)為正。
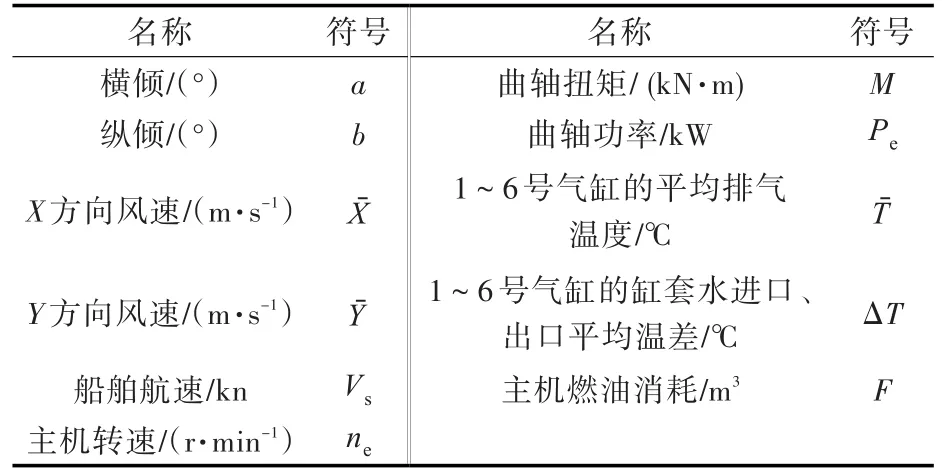
表1 目標(biāo)船狀態(tài)參數(shù)Table 1 State parameters of target ship
傳感器每隔30 s采集一次數(shù)據(jù),為保證模型的穩(wěn)定性,以5 min時(shí)長(zhǎng)為間隔來(lái)處理所采集的數(shù)據(jù)。其中,除主機(jī)油耗量數(shù)據(jù)為5 min內(nèi)的累計(jì)值之外,其他數(shù)據(jù)均為5 min內(nèi)的均值。
X方向和Y方向的風(fēng)速分別為
式中:N為5 min內(nèi)傳感器采集的總次數(shù);Vwc為風(fēng)速儀第c次采集的相對(duì)風(fēng)速,其中c=1,2,…,N;θc為船舶航向與風(fēng)向之間的夾角。
主機(jī)缸套水的進(jìn)口、出口溫差平均值ΔT為
式中:Tin為主機(jī)缸套水的進(jìn)口溫度;Toutg為1~6號(hào)氣缸缸套水的出口溫度,其中g(shù)=1,2,…,6。
1~6號(hào)氣缸排氣溫度的平均值Tˉ為
式中,Tg為1~6號(hào)氣缸的排氣溫度。
1.2 BP神經(jīng)網(wǎng)絡(luò)
對(duì)于輸入?yún)?shù)繁多的船舶航行狀態(tài)識(shí)別模型和油耗模型而言,若構(gòu)建一般的函數(shù),則難以準(zhǔn)確描述各物理量之間的因果關(guān)系,且普通函數(shù)對(duì)各型船舶的通用性較差[6]。本文將采用BP神經(jīng)網(wǎng)絡(luò)來(lái)構(gòu)建模型。BP神經(jīng)網(wǎng)絡(luò)是一種非線性智能算法,具有運(yùn)算速度快、容錯(cuò)能力高、自學(xué)能力強(qiáng)等特點(diǎn),是目前應(yīng)用最廣泛的神經(jīng)網(wǎng)絡(luò)模型之一。BP神經(jīng)網(wǎng)絡(luò)可以學(xué)習(xí)和存儲(chǔ)大量的輸入—輸出模式映射關(guān)系,而無(wú)需事前揭示描述這種映射關(guān)系的數(shù)學(xué)方程[7-9]。
BP神經(jīng)網(wǎng)絡(luò)是一種多層前饋型神經(jīng)網(wǎng)絡(luò),其拓?fù)浣Y(jié)構(gòu)如圖2所示。圖中:P1,P2,…,Pn為BP神經(jīng)網(wǎng)絡(luò)的輸入?yún)?shù);b1,b2,…,bm和θ1,θ2,…,θk為網(wǎng)絡(luò)的偏置;a1,a2,…,ak為網(wǎng)絡(luò)的預(yù)測(cè)值;ωij和ωjh為BP神經(jīng)網(wǎng)絡(luò)的權(quán)值。其中i=1,2,…,n;j=1,2,…,m;h=1,2,…,k。
圖2中的網(wǎng)絡(luò)包括n個(gè)輸入節(jié)點(diǎn)和k個(gè)輸出節(jié)點(diǎn),表達(dá)了從n個(gè)自變量到k個(gè)因變量的函數(shù)映射關(guān)系。網(wǎng)絡(luò)中隱含層第j個(gè)節(jié)點(diǎn)的輸出結(jié)果yj和輸出層第h個(gè)節(jié)點(diǎn)的輸出結(jié)果ah分別為
式中,f1和f2分別為輸入關(guān)系和輸出關(guān)系的傳遞函數(shù)。
本文將采用Matlab軟件來(lái)構(gòu)建神經(jīng)網(wǎng)絡(luò),選取f1為雙曲線正切函數(shù)tansig,f2為線性變換函數(shù)purelin。BP神經(jīng)網(wǎng)絡(luò)的學(xué)習(xí)分為2個(gè)階段:第1個(gè)階段是根據(jù)輸入的已知樣本,從第1層向后計(jì)算各神經(jīng)元的輸出;第2個(gè)階段是從最后一層向前計(jì)算各權(quán)值和閾值對(duì)總誤差的影響,進(jìn)而修改各權(quán)值和閾值。這2個(gè)階段反復(fù)交替進(jìn)行,直至函數(shù)收斂。為了提高網(wǎng)絡(luò)的收斂速度,本文選用列文伯格—馬夸爾特(Levenberg-Marquardt,LM)算法作為第2個(gè)階段的計(jì)算方法,并以均方誤差函數(shù)作為性能函數(shù)。
1.3 主成分分析法
航行狀態(tài)識(shí)別模型的輸出結(jié)果分為5種,即停泊、機(jī)動(dòng)航行、正常航行、沖車航行和大風(fēng)浪航行,其設(shè)計(jì)輸入為相對(duì)風(fēng)速Xˉ和Yˉ、船舶航速Vs、主機(jī)轉(zhuǎn)速ne、主機(jī)曲軸扭矩M、主機(jī)曲軸功率Pe及主機(jī)燃油消耗量F,運(yùn)用BP神經(jīng)網(wǎng)絡(luò)算法可以實(shí)現(xiàn)較高準(zhǔn)確度的航行狀態(tài)識(shí)別。
然而,對(duì)于主機(jī)油耗模型而言,其輸出結(jié)果是具體的燃油消耗量,其輸入?yún)?shù)多達(dá)10項(xiàng)(表1中前10項(xiàng))。在此情況下,變量之間有一定的關(guān)聯(lián)性,故變量提供給BP神經(jīng)網(wǎng)絡(luò)的信息會(huì)存在重疊,從而增加了計(jì)算的復(fù)雜性,減緩了網(wǎng)絡(luò)的收斂速度,降低了模型的準(zhǔn)確性并提高了BP神經(jīng)網(wǎng)絡(luò)過(guò)擬合的可能性[10-11]。如果神經(jīng)網(wǎng)絡(luò)過(guò)于復(fù)雜,會(huì)使信號(hào)和噪聲同時(shí)進(jìn)行擬合,從而導(dǎo)致神經(jīng)網(wǎng)絡(luò)的預(yù)測(cè)值與實(shí)際值嚴(yán)重不符,而采用大量的數(shù)據(jù)對(duì)網(wǎng)絡(luò)進(jìn)行訓(xùn)練并降低訓(xùn)練數(shù)據(jù)的噪聲則是避免出現(xiàn)過(guò)擬合問(wèn)題的有效方法[12]。因此,本文除了采用大量數(shù)據(jù)對(duì)模型進(jìn)行訓(xùn)練之外,還將應(yīng)用主成分分析法(Principal Component Analysis)對(duì)油耗模型的輸入數(shù)據(jù)進(jìn)行預(yù)處理以降低數(shù)據(jù)噪聲。
主成分分析法的實(shí)質(zhì)是在不改變樣本數(shù)據(jù)結(jié)構(gòu)的情況下,通過(guò)旋轉(zhuǎn)多維空間的坐標(biāo)將原變量轉(zhuǎn)換成兩兩不相關(guān)的主成分,同時(shí)盡可能反映原變量所包含的信息,從而簡(jiǎn)化計(jì)算[13-14]。本文將采用主成分分析法與BP神經(jīng)網(wǎng)絡(luò)算法相結(jié)合的方法,假設(shè)樣本矩陣X為
式中:樣本矩陣X中第v個(gè)參數(shù)類型中的第u個(gè)樣本數(shù)據(jù)為xuv,其中u=1,2,…,n且v=1,2,…,p;xu=[xu1xu2…xup]T,為p維列向量。
樣本矩陣的均值xˉ為
協(xié)方差矩陣S的表達(dá)式為
對(duì)于n行p列的樣本矩陣X而言,經(jīng)過(guò)矩陣變換后即得到樣本協(xié)方差矩陣S,其為p行p列的方陣,故式(8)之后的u=1,2,…,p且v=1,2,…,p。
協(xié)方差矩陣S中的任一元素Suv為
式中:xu′u和xu′v分別為樣本矩陣X中的某個(gè)元素,其中u′=1,2,…,p;
設(shè)Suv的p個(gè)特征值分別為且其單位正交特征向量t?為
則第u個(gè)樣本的主成分yu為
2 航行狀態(tài)識(shí)別模型
對(duì)正常航行的船舶而言,在實(shí)時(shí)評(píng)估其主機(jī)能耗狀態(tài)之前,應(yīng)先識(shí)別當(dāng)前船舶的航行狀態(tài)。在停泊狀態(tài)下,船舶航速、主機(jī)轉(zhuǎn)速、耗油量基本為0;在機(jī)動(dòng)航行狀態(tài)下,各項(xiàng)參數(shù)基本在停泊狀態(tài)和正常航行狀態(tài)的數(shù)值特征范圍內(nèi)波動(dòng);在正常航行狀態(tài)下,各項(xiàng)參數(shù)基本穩(wěn)定在一定范圍內(nèi);在沖車航行狀態(tài)下,各項(xiàng)參數(shù)將出現(xiàn)波動(dòng)且有所增加;在大風(fēng)浪航行狀態(tài)下,相對(duì)風(fēng)速將明顯增加,而船舶航速將有所降低。根據(jù)不同航行狀態(tài)的參數(shù)特征,將現(xiàn)有的歷史數(shù)據(jù)進(jìn)行統(tǒng)計(jì)分類,即可得到各個(gè)航行狀態(tài)的樣本數(shù)據(jù)。
為了實(shí)現(xiàn)較高準(zhǔn)確度的航行狀態(tài)識(shí)別,本文將以船舶航速、相對(duì)風(fēng)速、主機(jī)轉(zhuǎn)速、曲軸扭矩、曲軸功率和主機(jī)油耗量作為輸入,船舶航行狀態(tài)作為輸出。同時(shí),還需要設(shè)定神經(jīng)網(wǎng)絡(luò)計(jì)算矩陣的目標(biāo)值,即停泊為[1 0 0 0 0]T、機(jī)動(dòng)航行為[0 1 0 0 0]T、正常航行為[0 0 1 0 0]T、沖車航行為[0 0 0 1 0]T、大風(fēng)浪航行為[0 0 0 0 1]T,然后進(jìn)行訓(xùn)練學(xué)習(xí)。在Matlab軟件中建立并訓(xùn)練BP神經(jīng)網(wǎng)絡(luò)時(shí),設(shè)定訓(xùn)練函數(shù)為trainlm、學(xué)習(xí)函數(shù)為learngdm、性能函數(shù)為mse、隱含層和輸出層的傳遞函數(shù)分別為tansig和purelin,其中2層隱含層的神經(jīng)元數(shù)量均為10。訓(xùn)練函數(shù)trainlm采用LM算法,該方法結(jié)合了梯度下降法和牛頓法的優(yōu)點(diǎn),可以有效避免陷入局部最優(yōu)解并保證收斂速度[15]。
本文將選取目標(biāo)船在新加坡—圣路易斯航段(2015年03月20日至2015年04月06日)作為訓(xùn)練樣本,即該時(shí)間段內(nèi)船舶和主機(jī)均處于良好狀態(tài)下的航行數(shù)據(jù),其中停泊記錄22條、機(jī)動(dòng)航行記錄33條、正常航行記錄153條、沖車航行記錄14條、大風(fēng)浪航行記錄114條。
為了驗(yàn)證模型的準(zhǔn)確性,本文選擇了4個(gè)月后的航行記錄模型作為檢驗(yàn)樣本,即目標(biāo)船在馬跡山—新加坡航段(2015年07月19日至2015年07月22日)內(nèi)連續(xù)77 h的樣本數(shù)據(jù),仿真結(jié)果如圖3所示。圖中,各分圖的橫坐標(biāo)均為傳感器數(shù)據(jù)采集點(diǎn)的序號(hào)。
圖3(g)所示的評(píng)估航行狀態(tài)圖即模型識(shí)別所得的船舶航行狀態(tài),圖3(h)所示的實(shí)際航行狀態(tài)圖即通過(guò)查詢?cè)撃繕?biāo)船輪機(jī)日志和航海日志后統(tǒng)計(jì)得出的船舶實(shí)際航行狀態(tài),其縱坐標(biāo)數(shù)值1,2,3,4,5分別代表停泊、機(jī)動(dòng)航行、正常航行、沖車航行、大風(fēng)浪航行這5個(gè)狀態(tài)。由圖3可知,在第0~120采集點(diǎn)之間,船舶航速、主機(jī)轉(zhuǎn)速、扭矩、功率、油耗等均為0,識(shí)別模型判斷為停泊狀態(tài),判斷準(zhǔn)確;在第120~135采集點(diǎn)之間,船舶和主機(jī)的各項(xiàng)參數(shù)均出現(xiàn)了波動(dòng),模型將其識(shí)別為機(jī)動(dòng)航行狀態(tài),判斷準(zhǔn)確;在第128點(diǎn)左右,由于船舶的短暫提速,模型將其識(shí)別為正常航行狀態(tài),判斷錯(cuò)誤;在第135~486點(diǎn)之間,模型判斷船舶為正常航行狀態(tài),經(jīng)查詢航海日志,該目標(biāo)船確實(shí)為正常航行狀態(tài),判斷準(zhǔn)確;在第486~719點(diǎn)之間,風(fēng)速提高、船速降低,模型判斷為大風(fēng)浪航行狀態(tài),經(jīng)查詢航海日志,判斷準(zhǔn)確;在第885~892點(diǎn)之間,各項(xiàng)參數(shù)均出現(xiàn)了波動(dòng)且有所增加,模型判斷為沖車航行狀態(tài),經(jīng)查詢輪機(jī)日志,該目標(biāo)船在此時(shí)間段確實(shí)進(jìn)行了沖車操作,故模型判斷準(zhǔn)確。由此可知,模型判斷整個(gè)樣本的識(shí)別正確率為98.05%,從而為下一步建立主機(jī)油耗模型提供了基礎(chǔ)。
3 主機(jī)油耗模型
3.1 主成分分析處理
應(yīng)用BP神經(jīng)網(wǎng)絡(luò)構(gòu)建主機(jī)油耗模型時(shí),需要先對(duì)訓(xùn)練樣本進(jìn)行主成分分析。本文選取了目標(biāo)船在2015年3~5月的船舶和主機(jī)運(yùn)行數(shù)據(jù)作為訓(xùn)練樣本,該時(shí)間段內(nèi)目標(biāo)船和主機(jī)均處于良好運(yùn)行狀態(tài)。選取表1的前10個(gè)參數(shù)作為主成分分析的原始變量,設(shè)定主成分Z1~Z10,計(jì)算所得的成分矩陣如表2所示,各主成分對(duì)應(yīng)的特征值、方差貢獻(xiàn)率及累計(jì)方差貢獻(xiàn)率如表3所示。
由表3可知,Z1~Z5的累計(jì)貢獻(xiàn)率為93.87%,而Z6~Z10的貢獻(xiàn)率則很小。因此,本文將選擇Z1~Z5作為表述樣本內(nèi)容的主要數(shù)據(jù)來(lái)計(jì)算各項(xiàng)主成分的系數(shù),結(jié)果如表4所示。根據(jù)各主成分的系數(shù),將原訓(xùn)練樣本的10種原始變量轉(zhuǎn)換為5項(xiàng)主成分,即可作為BP神經(jīng)網(wǎng)絡(luò)的輸入數(shù)據(jù)。
3.2 建立油耗模型
在matlab中設(shè)定BP網(wǎng)絡(luò)油耗模型的訓(xùn)練函數(shù)為trainlm、學(xué)習(xí)函數(shù)為learngdm、性能函數(shù)為mse、隱含層和輸出層的傳遞函數(shù)分別為tansig和purelin。對(duì)于隱含層的層數(shù)和神經(jīng)元節(jié)點(diǎn)數(shù)目,目前缺乏設(shè)定最優(yōu)數(shù)目的明確指導(dǎo)方法,本文將設(shè)定神經(jīng)元節(jié)點(diǎn)數(shù)目的取值范圍為0~20,然后采用循環(huán)程序遍歷2層隱含層中所有神經(jīng)元數(shù)目組合的模型訓(xùn)練誤差,最后根據(jù)計(jì)算所得的訓(xùn)練誤差值確定最優(yōu)的神經(jīng)元數(shù)目設(shè)定。如圖4所示,將3.1節(jié)中已處理的主成分?jǐn)?shù)據(jù)信息作為BP網(wǎng)絡(luò)的設(shè)計(jì)輸入,通過(guò)循環(huán)程序即可得到不同神經(jīng)元數(shù)目組合的訓(xùn)練誤差結(jié)果。
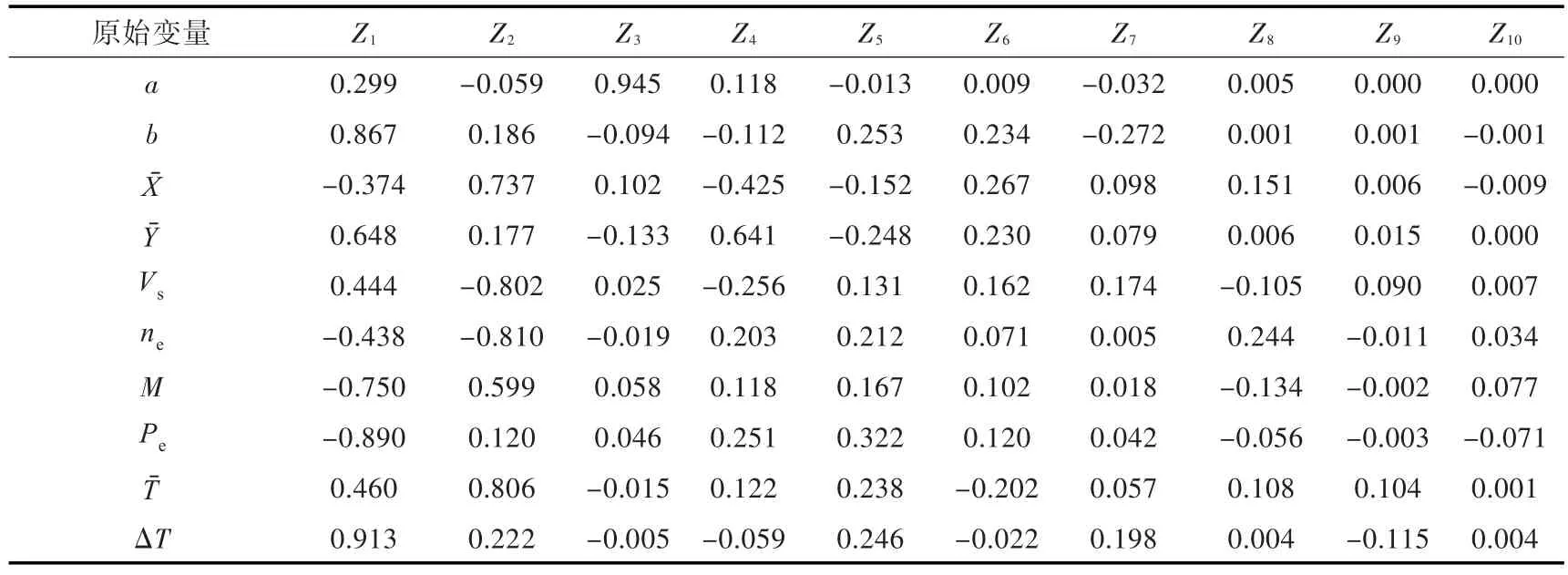
表2 成分矩陣Table 2 Component matrix

表3 總方差解釋Table 3 Total variance interpretation
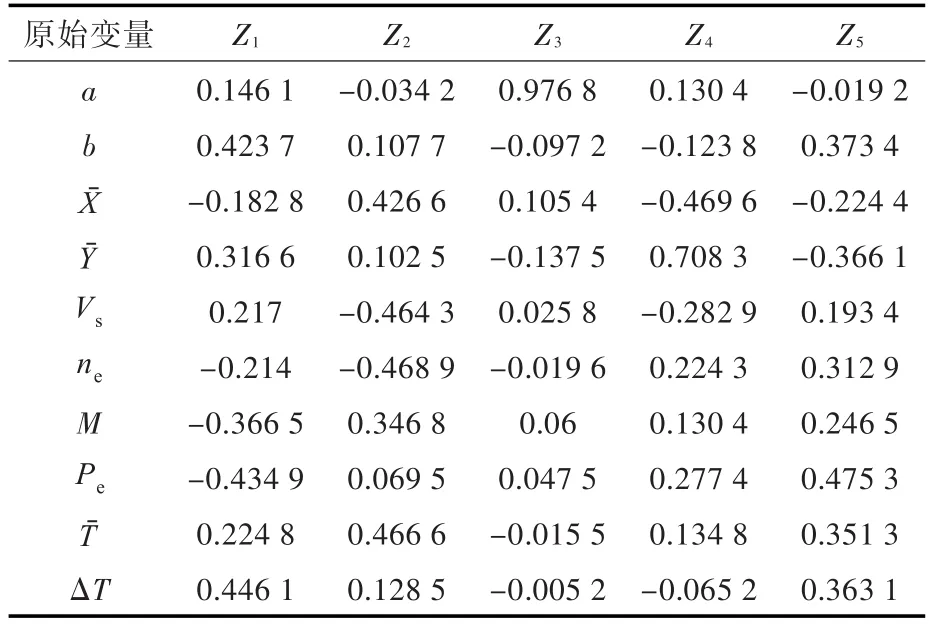
表4 各項(xiàng)主成分的系數(shù)Table 4 The coefficients of each principal component
經(jīng)計(jì)算,當(dāng)?shù)?層隱含層神經(jīng)元數(shù)目為16且第2層為11時(shí),數(shù)據(jù)整體的均方誤差最小,其值為6.325 9×10-5。因此,本文設(shè)定BP神經(jīng)網(wǎng)絡(luò)中2層隱含層的神經(jīng)元數(shù)目分別為16和11,然后,即可建立并訓(xùn)練網(wǎng)絡(luò),最終得出正常航行狀態(tài)下的主機(jī)油耗模型。
需要指出的是,由于不同的船舶和主機(jī)的匹配關(guān)系與性能均有所差別,所以針對(duì)其他船舶構(gòu)建航行狀態(tài)識(shí)別模型和主機(jī)油耗模型時(shí),還需要重新通過(guò)計(jì)算機(jī)程序進(jìn)行神經(jīng)網(wǎng)絡(luò)訓(xùn)練,所需的時(shí)間成本也應(yīng)在可接受范圍內(nèi)。本文已經(jīng)確定了神經(jīng)網(wǎng)絡(luò)訓(xùn)練的模式和函數(shù),故可以推廣應(yīng)用至其他船舶和主機(jī)。
3.3 模型驗(yàn)證與分析
選取目標(biāo)船在圣路易斯—馬跡山—新加坡航段(2015年05月19日至2015年05月24日)的部分航程作為驗(yàn)證樣本,經(jīng)航行狀態(tài)識(shí)別模型提取正常航行狀態(tài)數(shù)據(jù),并根據(jù)各主成分系數(shù)計(jì)算得出5項(xiàng)主成分參數(shù),輸入BP神經(jīng)網(wǎng)絡(luò)即可得出對(duì)應(yīng)的理論油耗值,結(jié)果如圖5所示。
由于主機(jī)燃油流量計(jì)數(shù)器的輸出數(shù)據(jù)精度為0.01 m3,故圖5中的實(shí)際油耗值曲線存在幅值為0.01左右的波動(dòng),但總體趨勢(shì)與計(jì)算油耗值曲線一致。在第150個(gè)數(shù)據(jù)點(diǎn)附近,計(jì)算油耗值出現(xiàn)了小幅降低,船舶的曲軸扭矩和功率分別在1 620 kN·m和9 600 kW左右波動(dòng),略低于整體平均水平1 673 kN·m和10 022 kW,而實(shí)際油耗值也出現(xiàn)了降低現(xiàn)象,可見計(jì)算結(jié)果與實(shí)際運(yùn)行情況相符。在第500個(gè)數(shù)據(jù)點(diǎn)附近,實(shí)際油耗值出現(xiàn)了異常高峰點(diǎn),經(jīng)查為傳感器的暫時(shí)故障所致,而其他數(shù)據(jù)點(diǎn)的傳感器工作正常。由圖5可知,主機(jī)油耗模型的總體平均相對(duì)誤差為3.47%,且未產(chǎn)生明顯的過(guò)擬合現(xiàn)象。
將實(shí)際油耗值和計(jì)算油耗值進(jìn)行對(duì)比,以殘差形式體現(xiàn)主機(jī)的能效狀態(tài),如圖6所示。
由圖6可知,在該段航程內(nèi)的各項(xiàng)工況下,主機(jī)的性能特征與良好能效狀態(tài)相吻合,即主機(jī)能效狀態(tài)正常。同時(shí),由于主機(jī)燃油流量計(jì)數(shù)器的輸出數(shù)據(jù)精度為0.01 m3,故大部分樣本數(shù)據(jù)點(diǎn)的耗油量殘差都在-0.01~0.01范圍內(nèi)波動(dòng)。
4 結(jié) 語(yǔ)
本文結(jié)合實(shí)船航行數(shù)據(jù),運(yùn)用BP神經(jīng)網(wǎng)絡(luò)算法建立了船舶航行狀態(tài)識(shí)別模型,可以有效識(shí)別船舶的5種航行狀態(tài),其準(zhǔn)確率達(dá)98.05%。同時(shí),依據(jù)船舶和主機(jī)的10個(gè)運(yùn)行參數(shù)與主機(jī)燃油消耗量之間的關(guān)系,采用主成分分析法降低了各個(gè)變量之間的關(guān)聯(lián)性和復(fù)雜性,并運(yùn)用BP神經(jīng)網(wǎng)絡(luò)算法構(gòu)建了船舶主機(jī)正常值油耗模型,其總體平均相對(duì)誤差為3.47%。通過(guò)綜合運(yùn)用這2種模型,可以對(duì)正常航行狀態(tài)下的主機(jī)實(shí)時(shí)狀態(tài)進(jìn)行評(píng)估,可為智能船舶的能效管理提供參考。
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
艦船科學(xué)技術(shù)(2022年14期)2022-09-22 03:07:40
艦船科學(xué)技術(shù)(2022年2期)2022-03-29 01:12:44
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
小哥白尼(趣味科學(xué))(2019年10期)2020-01-18 09:16:22
船舶標(biāo)準(zhǔn)化工程師(2019年4期)2019-07-24 07:21:12
中國(guó)船檢(2017年3期)2017-05-18 11:33:09
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
核科學(xué)與工程(2015年4期)2015-09-26 11:59:03
