AGV叉車在倉儲行業(yè)的應(yīng)用
2018-08-17 06:31:28陳寶強蔣旭東侯敬波
中國儲運 2018年8期
文/陳寶強 蔣旭東 侯敬波
一、引言
AGV是自動導(dǎo)航運輸車(Automatic Guided Vehicle)的英文縮寫。根據(jù)美國物流協(xié)會定義,AGV是指裝備有電磁或光學(xué)等自動導(dǎo)引裝置,能夠沿規(guī)定的導(dǎo)引路徑行駛,同時還具有自動編程,安全保護和各種移載功能的運輸設(shè)備,AGV是現(xiàn)代物流系統(tǒng)的關(guān)鍵設(shè)備之一。
自動引導(dǎo)車系統(tǒng)(AGVS-Automatic Guided Vehicle System)是由多臺AGV組成,集機電控制,計算機網(wǎng)絡(luò)及無線通訊等技術(shù)于一體的集成化智能運輸系統(tǒng)。AGVS可用于各行各業(yè)自動化生產(chǎn)、儲運、辦公、服務(wù)等系統(tǒng)中執(zhí)行室內(nèi)物料運輸任務(wù),其中汽車生產(chǎn)、機械制造及電子工業(yè)方面的應(yīng)用占較大比例,其它較多的應(yīng)用部門分別為造紙、化工、視頻、紡織等行業(yè)。
在汽車制造業(yè)中,AGVS常用于裝配生產(chǎn)線,以增加傳輸?shù)娜嵝裕绨l(fā)動機或底盤的裝配線、車身機器人焊接線等。
在機械加工或綜合作業(yè)的柔性制造系統(tǒng)中,AGV系統(tǒng)在先進的倉儲系統(tǒng)以及自動化工廠中的應(yīng)用是很典型的。AGV系統(tǒng)也是當前國內(nèi)外研究開發(fā)的高技術(shù)領(lǐng)域——計算機集成制造系統(tǒng)不可缺少的物流智能化設(shè)備。
AGV單機控制系統(tǒng)的核心技術(shù)不僅決定著系統(tǒng)的柔性,同時也影響著系統(tǒng)運行的各個方面性能。隨著科學(xué)技術(shù)的不斷發(fā)展,多種導(dǎo)引方式已應(yīng)用到AGV中。
AGV按照導(dǎo)引方式有無導(dǎo)引路徑分為固定路徑導(dǎo)引和自由路徑導(dǎo)引兩類。固定路徑導(dǎo)引是指在AGV的運行路徑上設(shè)置導(dǎo)引用的信息媒介物,通過車體上的傳感器檢測出其信號從而得到導(dǎo)引的一種方式,如光學(xué)導(dǎo)引、電磁導(dǎo)引、磁帶導(dǎo)引等。自由路徑導(dǎo)引方式是指在AGV的控制器上存儲著區(qū)域位置的尺寸坐標,通過識別車體當前方位,自主的決定行駛路徑的一種導(dǎo)引方式,主要有慣性導(dǎo)引、激光導(dǎo)引、視覺導(dǎo)引等。
二、AGV車型分類
包括:負載式、輕載多向移動式、嵌入式、叉車式、牽引式、帶特定工裝/夾具
見下圖:

負載式

輕載多向移動式

叉車式

嵌入式

牽引式

帶特定工裝/夾具
三、AGV體系構(gòu)成
1.呼叫終端-呼叫處理-下發(fā)指令
2.監(jiān)控終端-路徑規(guī)劃交通管理任務(wù)指派-對接上下層
3.車載終端-執(zhí)行與反饋
四、AGV導(dǎo)航的分類及導(dǎo)航技術(shù)
1.AGV導(dǎo)航的分類
激光導(dǎo)航、自然導(dǎo)航、測距導(dǎo)航、磁釘導(dǎo)航、電磁導(dǎo)航、磁帶導(dǎo)航、多類型導(dǎo)航
2.AGV導(dǎo)航技術(shù)
目前,最常用的AGV導(dǎo)航模式如下:
激光導(dǎo)航:該車輛通過測量角度以及距離人工地標(反射器)的距離來進行導(dǎo)航。
見下圖:

磁釘導(dǎo)航:該車輛通過檢測地面上的磁鐵進行導(dǎo)航。一般用于托盤-貨架、走廊與背馱式自動導(dǎo)引車。
見下圖:

磁帶導(dǎo)航:該車輛利用地面上的磁帶進行導(dǎo)航,距離標志牌用于沿著磁帶更新距離。一般用于托盤-貨架、走廊與背馱式自動導(dǎo)引車。
自然導(dǎo)航:通過激光掃描周圍的環(huán)境,與計算機系統(tǒng)中存儲的環(huán)境地圖進行匹配,從而確定車體的當前位置。
慣性導(dǎo)航:采用陀螺儀檢測車輛的方位角以及離參考點的距離來確定當前位置,通過與給定路線的比較來控制AGV的行駛方向。常常會結(jié)合磁釘、激光導(dǎo)航。
綜合不同導(dǎo)航方法,在任何時間或地點改變導(dǎo)航方向
一般應(yīng)用于反射器視野有限的環(huán)境
如:托盤-貨架卷紙倉庫等
見下圖:

AGV硬件系統(tǒng)
針對經(jīng)常出現(xiàn)振動、粉塵、潮濕和溫度變化的惡劣環(huán)境而設(shè)的硬件系統(tǒng)
包括:驅(qū)動器、車載控制器、顯示器、編碼器、光電傳感器、導(dǎo)航傳感器等。
見下圖:

AGV軟件系統(tǒng)
用途:管理AGV系統(tǒng)中的實際運輸
包括:主機、車齡系統(tǒng)控制器、交通流量控制器、流量管理、車隊管理、維修工具、車輛維護、車輛診斷、導(dǎo)航、負載處理、驅(qū)動控制、操作界面、設(shè)計管理平臺、布局、應(yīng)用等。
五、我國AGV叉車的應(yīng)用及技術(shù)現(xiàn)狀
在我國,AGV產(chǎn)品大量用于汽車零部件行業(yè)以及港口集裝箱的堆垛,要實現(xiàn)在倉庫中的取貨或堆垛功能,就要把AGV的自動導(dǎo)航功能與傳統(tǒng)叉車的起升、堆垛、前傾卸載等功能結(jié)合起來,這就是我們常說的AGV叉車。
AGV叉車基本上都是自由路徑導(dǎo)引AGV,自由路徑導(dǎo)引中以激光導(dǎo)引式AGV叉車為主。國內(nèi)許多叉車企業(yè)也在研發(fā)AGV叉車,如上海匯聚科技有限公司,在常用AGV的基礎(chǔ)上,開發(fā)出了AGV前移式叉車,以麥克納姆輪為驅(qū)動輪的AGV叉車,大型的高鐵車廂組裝用AGV平臺車等產(chǎn)品。
國內(nèi)叉車企業(yè)對AGV技術(shù)還處在摸索的過程中,產(chǎn)品技術(shù)不是很成熟,對于想在短時間內(nèi),掌握這項技術(shù)還存在很大的難度,因此國內(nèi)的部分叉車企業(yè)選擇了與國際領(lǐng)先企業(yè)技術(shù)合作,建立戰(zhàn)略同盟關(guān)系,例如國際上知名的Kollmorgen(科爾摩根)公司,把核心的AGV技術(shù)與傳統(tǒng)的叉車結(jié)合起來,實現(xiàn)智能化倉庫的儲運功能,提高了倉庫的儲存效率,降低了人工成本。
但國內(nèi)企業(yè)生產(chǎn)的AGV叉車由于缺少自主核心技術(shù),要廣泛用于智能化工廠,還有很長的路要走。
AGV重要的核心技術(shù)體現(xiàn)在以下四個方面:
1.AGV管理監(jiān)控調(diào)度系統(tǒng)是AGV系統(tǒng)重要核心技術(shù)之一,應(yīng)開發(fā)基于100臺以上AGV的管理調(diào)度系統(tǒng)開發(fā)工作,開展人機交互技術(shù)、遠程監(jiān)控技術(shù)、遠程故障診斷技術(shù)的專項研究,提高我國自主知識產(chǎn)權(quán)的軟件開發(fā)水平,以適應(yīng)國內(nèi)近年來AGV的市場需求。
AGV調(diào)度控制系統(tǒng)是一個復(fù)雜的軟、硬件系統(tǒng),目前國內(nèi)外中高端的AGV系統(tǒng)均有AGV調(diào)度控制系統(tǒng)。系統(tǒng)硬件一般由服務(wù)器、管理監(jiān)控計算機、網(wǎng)絡(luò)通信系統(tǒng)以及相關(guān)接口等組成;軟件由相關(guān)的數(shù)據(jù)庫管理系統(tǒng)、管理監(jiān)控調(diào)度軟件等組成。
2.AGV車載控制器是AGV控制系統(tǒng)(核心算法)的核心,研制基于嵌入式計算機系統(tǒng)的專用AGV車載控制器,取代以采用工控機或通用PLC作為主控單元的AGV車載控制器是未來的技術(shù)發(fā)展趨勢,也是今后研發(fā)工作的重點。
3.供電技術(shù):AGV的供電技術(shù)除了傳統(tǒng)的供電電池外,以“物理線性放電”、充電效率高、使用壽命長為特點的超級電容在AGV上的應(yīng)用開始發(fā)力。同時,無線供電技術(shù)得到發(fā)展,在國內(nèi)雖然仍然處在實驗室和使用階段,但是,在國外已經(jīng)得到應(yīng)用且以德國企業(yè)為主。
4.AGV小車的核心部件,例如:電機、傳感器等核心零部件多數(shù)采用國外進口產(chǎn)品,核心關(guān)鍵技術(shù)受制于人,也制約了國內(nèi)AGV行業(yè)的發(fā)展。
六、AGV叉車的基本狀況
目前國內(nèi)外比較流行的AGV叉車的生產(chǎn)方式分為兩種,一種是AGV叉車完全自制,另一種為普通叉車改造。
1.執(zhí)行元件自制
執(zhí)行元件自制就是AGV叉車的主體結(jié)構(gòu)部分包括車架、門架和工作裝置等都是由AGV叉車生產(chǎn)企業(yè)根據(jù)AGV叉車的需要設(shè)計,需要機械工程師的配合,形成一體方案,對于自制AGV叉車車體即執(zhí)行機構(gòu),由于國內(nèi)AGV廠家的發(fā)展時間不長、國內(nèi)高精機加配套不佳,導(dǎo)致AGV叉車在運行速度、精準度較差,在軟件控制系統(tǒng)上的要求更高。歐洲AGV叉車執(zhí)行元件基本上都采用自制,可以根據(jù)自己的技術(shù)、配重、客戶的物料、工況做最佳的匹配。
2.執(zhí)行元件由普通叉車改造
國內(nèi)部分AGV叉車生產(chǎn)企業(yè)執(zhí)行元件采用普通叉車,隨著國內(nèi)大型叉車企業(yè)與國際知名配套企業(yè)的合作,選用高精度的傳感器和控制系統(tǒng),實現(xiàn)了AGV的運行精度高,可靠性良好的效果。
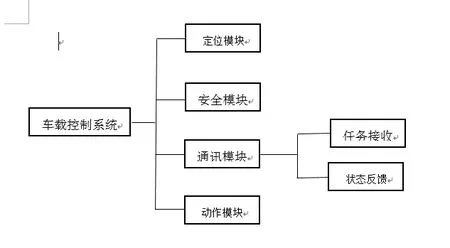
七、AGV叉車車載控制系統(tǒng)
AGV車載控制系統(tǒng)主要完成AGV的導(dǎo)引、驅(qū)動轉(zhuǎn)向控制、執(zhí)行機構(gòu)操作和安全防護等工作,因此車載控制系統(tǒng)的主要功能模塊分為:AGV的定位模塊、安全模塊、通訊模塊以及AGV的動作模塊。
1.定位模塊
通過反光膠貼定位,激光導(dǎo)航系統(tǒng)360°高精度地掃描周圍環(huán)境輪廓信息(距離、角度及反光率)和反射膠貼位置數(shù)據(jù)。通過反射膠貼的測量數(shù)據(jù)自動計算出車輛的位置。見下圖。


2.安全模塊
安全裝置是AGV最重要的組成部分之一。現(xiàn)代化的生產(chǎn)環(huán)境中,人與各種機械設(shè)施處于同一環(huán)境中,AGV作為一種運動中的動作功能機械,其安全保障功能尤為重要。安全裝置可以防止設(shè)備在運行中出錯,除了保護AGV自身安全、維護AGV功能的順利完成外,還在最大可能的范圍內(nèi)保護和運行環(huán)境設(shè)施的安全。
安全防護:障礙物接近檢測裝置和接觸檢測裝置
①接觸檢測裝置:采用機械防撞圍欄或者安全防撞觸邊。見右圖。
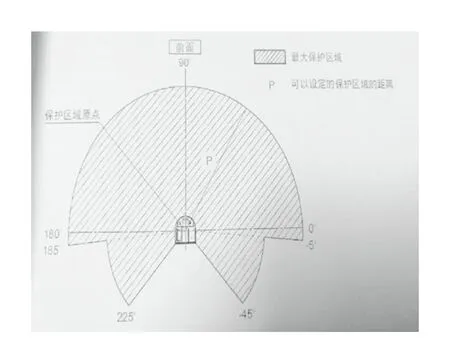
②障礙物接近檢測裝置:采用激光掃描,掃射距離4m,掃描范圍270°的平面區(qū)域,最小檢測物體:直徑30mm,40mm,50mm可以進行設(shè)置。見下頁圖。
3.通訊模塊
通訊模塊是AGV和上位控制機交換信息和命令的橋梁。由于無線通訊具有不受障礙物阻擋的特點,一般采用上位機和AGV之間采用無線通訊。目前AGV中用的無線通訊主要有無線局域網(wǎng)和無線數(shù)傳模塊兩種方式。但是由于無線數(shù)傳模塊不支持全雙工模式,且輸入和輸出切換等待時間較長,模塊的傳輸速率低,因此通常的AGV與上位機的通訊采用無線局域網(wǎng)的模式。
無線局域網(wǎng)由無線網(wǎng)和無線路由器組成,簡單地說,WLAN就是指不需要網(wǎng)線就可以通過無線方式發(fā)送和接收數(shù)據(jù)的局域網(wǎng),只通過安裝無線路由器,在AGV車載機上安裝無線網(wǎng)卡就可以實現(xiàn)車載機與上位機之間的無線連接。無線局域網(wǎng)具有支持全雙工模式、安裝便捷、組網(wǎng)靈活、傳輸速率高、易于擴展和高移動性的優(yōu)點,因此通常的適用于AGV的通訊模塊。
4.動作模塊
AGV的動作模塊包括驅(qū)動轉(zhuǎn)向以及物料的移載。驅(qū)動系統(tǒng)是AGV車載控制系統(tǒng)中一個關(guān)鍵的子系統(tǒng)。它直接決定了AGV的運動性能。通常AGV的驅(qū)動轉(zhuǎn)向有中間輪驅(qū)動差速轉(zhuǎn)向、前輪驅(qū)動轉(zhuǎn)向和前后輪驅(qū)動轉(zhuǎn)向這三種方法。


驅(qū)動轉(zhuǎn)向系統(tǒng)主要由驅(qū)動控制單元、電機、減速器和車輪組成。驅(qū)動轉(zhuǎn)向系統(tǒng)按照有無反饋環(huán)節(jié)可分為開環(huán)控制和閉環(huán)控制兩類。由于開環(huán)驅(qū)動系統(tǒng)沒有反饋檢查環(huán)節(jié),所有精度低,通常都采用閉環(huán)驅(qū)動系統(tǒng)。
5.工作裝置檢查模塊
對于AGV叉車,由于工作方式與其他的載貨類的AGV車輛的不同,AGV叉車的工作是通過貨叉裝卸貨物的,因此AGV在貨物堆放點,準確安全的叉舉貨物的環(huán)節(jié)是至關(guān)重要的。由于AGV叉車貨叉未能夠精準的叉裝到貨物托盤將貨物頂翻,或者是貨叉未叉裝到貨叉根部,在貨物起升過程中,貨物就會傾翻,造成重大安全生產(chǎn)事故,因此工作裝置的檢查模塊對于AGV叉車是至關(guān)重要的。
工作裝置檢查模塊可以簡單地分為幾個裝置:貨叉前端的插孔檢測、叉齒末端貨物到位檢測、貨物防護檢測和起升高度檢測(旋轉(zhuǎn)編碼器)等。
(1)叉齒前端的插孔檢測

(2)叉齒末端貨物到位檢測

(3)貨物防護(小型光電開關(guān)傳感器:精度40~300mm):叉齒前端安裝上照防護紅外和叉齒前端安裝下照防護紅外,保障貨物的完全卸下以及叉齒下面是否有異物。

(4)起升高度檢測:旋轉(zhuǎn)編碼器

小結(jié)
AGV叉車是機械化、電子化、智能化和信息化的產(chǎn)物,是智能化工廠和倉庫的重要組成部分。近年來倉儲叉車保持著高速的增長,2016年倉儲叉車同比增長在20%左右,倉儲叉車保持高增長速度的同時,對倉儲叉車智能化的需求也是越來越高,智能物流倉儲需要智能化的AGV車輛來搭建,提高物流效率,提高物流的準確率。
國內(nèi)部分企業(yè)也在積極搭建自身的AGV車輛體系,滿足不同客戶的需求,但是依然存在起步晚、沒有核心技術(shù)和產(chǎn)品性能不穩(wěn)定等諸多問題。
本文對AGV叉車的基本構(gòu)成、軟件系統(tǒng)、硬件系統(tǒng)進行了分析,相信隨著我國工業(yè)產(chǎn)品智能化水平的提高,AGV叉車一定會突破原有AGV的功能局限性,更廣泛地應(yīng)用于物流和倉儲領(lǐng)域,提高倉儲行業(yè)運行效率和技術(shù)水平。
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
