形狀記憶智能復合材料的發展與應用
2018-08-20 06:38:00蔣建軍王林文任恩毅高新宇鄧國力
材料工程 2018年8期
蔣建軍,胡 毅,陳 星,王林文,任恩毅,高新宇,鄧國力
(西北工業大學 航空宇航制造系,西安710072)
作為材料科學的重要分支,智能復合材料已成為當今社會的時代焦點[1]。智能復合材料基于仿生學起步:螞蟻可舉起20倍自身質量的重物,于是出現了承重在百倍質量的記憶合金;獨角仙的外殼會隨外界空氣濕度增加而由綠色變成黑色,由此研制了可作為濕度探測器的新型復合材料;荷葉微結構與高憎水表面減小了與固體微粒和小水滴的接觸面積,使附著力大為降低,從而合成了具有自潔效應的防水防污復合材料。智能復合材料因自感知、自診斷、自修復、自驅動等諸多優良特性而備受關注[2],加之能實現生命智能基本功能——感知、決策和執行,具有類似于生物體體征的“活性”,被冠以智能復合材料之名。智能復合材料泛指能夠感知外界環境并做出響應的材料[3],楊大智院士將其定義為“模仿生命系統,能感知環境變化,并能實時地改變自身的一種或多種性能參數,做出所期望的、能與變化后的環境相適應的復合材料或材料的復合”[4]。
形狀記憶材料(Shape Memory Material,SMM)作為刺激-響應型智能材料,其初始形狀在一定條件下發生變形并固定到另一種形狀后,施加適當的溫度、壓力等外界刺激,材料能通過對形狀、位置、應變等力學參數進行調整而恢復初始形狀。作為智能復合材料中的重要組元,SMM在醫療[5-8]、航空[9]、機器人[10-11]、建筑[12]等領域變革了生產方式,極大地提高了生產力發展水平。SMM主要包括形狀記憶合金(Shape Memory Alloy,SMA)、形狀記憶聚合物(Shape Memory Polymer,SMP)、形狀記憶陶瓷等幾種類型。這里就最常見的SMA和SMP兩種材料的最新研究進展和應用展開論述。
1 形狀記憶合金
SMA具有極佳的機械屬性,低溫產生的變形能在適當的熱刺激下完全恢復,這一形狀記憶效應(Shape Memory Effect,SME)主要源于低溫穩定結晶馬氏體相到高溫結晶奧氏體相的相位轉變。超彈性是SMA另一特征,即在較大溫度范圍經歷相對較高應變程度的加載然后卸載,材料經過遲滯回線恢復到初始形狀[13]。
1.1 SMA歷史發展進程
SMA最早可追溯到1932年,?lander[14]首先發現了SMA的固相變形Au-Cd合金冷卻時發生塑性變形,加熱后恢復原始形狀;1941年Kaeufer等[15]進行牙科聚合物材料的研究時給出了“形狀記憶”的術語;20世紀60年代,SME概念被正式提出;1962年,Buehler等[16]揭示了近等原子比NiTi合金具有SME,這一發現在工程界和學術界引發了極大反響,為SMA的商業化應用提供了可能性。此后SMA步入快速發展階段,1969年Grumman航空公司[17]為F-14噴氣式戰斗機配備了“縮緊到合適位置”的SMA管接頭;1971年Andreasen 制備了正畸橋接SMA導線[18]。SMA優良的延展性能和抗疲勞性能以及高溫下表現出的較大剛度,使其在航空航天、生物醫學、工業、軍事、建筑、汽車等領域都得到了廣泛應用。
1.2 SMA最新研究進展
1.2.1 SMA增材制造技術進展
增材制造技術(AM)俗稱3D打印技術,是一種與傳統材料加工方法截然相反的,通過增加材料逐層制造的方式[19],是能實現三維結構快速、自由制造的先進制造技術,是制造技術、信息技術和新材料技術等多學科融合發展的產物。自20世紀80年代末提出AM概念以來,該技術取得了迅猛發展,給裝備制造業帶來了革命性的變化。美國成立了國家增材制造創新研究院,英國設立國家增材制造中心,德國建立直接制造研究中心,日本設立了新物造研究工作組,《中國制造2025戰略》更是將3D打印技術列為未來智能制造的重點技術,使其在中國迎來了新的發展機遇期[20-23]。
Ma 等[24]使用選擇性激光熔化技術(Selective Laser Melting,SLM),在不同溫度激活多個形狀恢復階段從而合成SMA零件。該方法實現了金屬合金三維歷史進程的局部控制,得到了功能特性受空間控制的新型材料。圖1是用SLM和AM制成的U形NiTi合金的多階段形狀恢復過程。Haberland等[25]提出用AM生產高質量NiTi 形狀記憶和超彈性工件的理念,并通過優化加工工藝和加工參數得到了形狀記憶特性和超彈性優良的工件。Carreno-Morelli等[26]借助有機聚合物將NiTi粉末黏結在一起,逐點累加固化得到了三維立體SMA結構,其材料密度可達理論值的95%。Hehr等[27]使用超聲增材制造技術(UAM),通過超聲波將SMA結合到金屬基體中,得到了可在外部刺激下實現變形的智能結構,并成功構建UAM動力學線性非時變模型。劉洪濤等[28]就沖擊條件下NiTi基SMA的形變機制展開研究,發現受沖擊的樣品在第一次DSC熱循環中出現了3個馬氏體吸熱峰,表現為三步逆馬氏體相變,而在第二次熱循環中兩個應力誘發的馬氏體吸熱峰消失。龍大偉[29]采用激光熔覆技術(LC)在鋁青銅表面制備了NiCu合金涂層,其磨損機制大為改觀,磨損量降低90%,耐腐蝕性能也得到增強。徐鵬[30]在大氣環境下用LC成功在不銹鋼表面制備了Fe17Mn5Si10Cr5Ni記憶合金涂層,該涂層具有良好的SME和力學性能,耐磨性和接觸疲勞強度均得到顯著提高。

圖1 制件兩臂于不同溫度下開始形狀恢復進程并隨之產生與位置相關的主動響應[24]Fig.2 Two “arms” of the piece activate their shape recovery at different temperatures, creating a location-dependent active response[24]
1.2.2 SMA生物相容性研究進展
NiTi合金暴露于體液可能會釋放Ni進而對機體造成威脅使得NiTi合金的發展存在隱患。Toker等[31-32]將NiTi SMA放進人體不同部位的體液中,就生物相容性與樣品結構和身體部位依賴性間的關系展開研究。結果顯示樣品形狀和體液成分都會對生物相容性產生影響(如胃液會加劇離子釋放等),顯微觀察揭示了NiTi合金在體液環境中局部腐蝕機制,對評估材料的生物相容性意義重大。
Sun等[33]對多孔型和致密型NiTi SMA在NaCl溶液中的腐蝕行為進行了對比,結果表明多孔NiTi合金更易局部腐蝕,孔的密度分布對侵蝕作用影響不大,但多孔NiTi合金的孔內電勢分布對侵蝕作用影響巨大。Shabalovskaya等[34]對NiTi合金絲加工時形成的氧化物層對Ni釋放的阻礙作用進行研究,證實了TiO2氧化層厚度越厚會釋放越多的Ni,并且加工工藝對Ni的釋放影響重大。Li等[35]研發了生物醫用NiTiCu SMA,該合金較NiTi合金具有更好的生物相容性和抗菌性,腐蝕現象、力學性能和SME都得到了改善。Luo等[36]將Ag移植到NiTi合金中制得了NiTiAg SMA,該合金較NiTi合金具有更好的抗菌性能,兩者抗腐蝕性能相當。
1.2.3 SMA在工程實際的發展
驅動速率慢是制約SMA發展的主要因素之一,就如何解決這一難題的討論愈演愈烈。Teh等[37]提供了實現SMA線快速、精確控制的新型結構,實現了其在外部較大干擾下的快速、準確的閉環響應。Velzquez等[38]引入若干溫度控制器來改善加熱過程進而加快驅動速率,極大地改善了SMA熱動力學特性。Granito等[39]使用基于半導體小型熱泵的熱電效應來改變SMA帶的溫度,該方法相較自然對流散熱大幅縮短了冷卻時間。Getters等[39]將硅膠袖套包覆SMA絲使得冷卻效率較自然對流散熱提高了10倍。Song等[40]研制的具備彎曲扭轉功能的35Hz SMA制動器實現了快速彎曲致動和大變形。他們通過許多細SMA線加快散熱速率,實現了快速冷卻。
疲勞是影響SMA力學性能的重要因素。Scirè[41]和Dragoni等[42]對不同應力、應變條件下的SMA進行研究,發現恒應變條件相較于恒應力條件顯著縮短了疲勞壽命。Matheus等[43]將不同碳、氧組分的NiTi絲在不同的應變幅值和旋轉速率下進行彎扭疲勞測試,發現SMA絲的表面質量與疲勞性能密切相關。Takeda等[44]將高能氮離子接在NiTi絲表面得到了更好的熱-機性能和更久的疲勞壽命,他們還將高能氮接在NiTi SMA帶表面,得到了更久的彎曲疲勞壽命。
應變恢復大小是衡量SMA性能的重要指標。Tanaka等[45]合成了一種含鐵多晶SMA,室溫下可得到13%的恢復應變,遠大于NiTi SMA。Wen等[46]發現FeMnSi基SMA恢復應變小是由于應力誘導型馬氏體和高密度退火孿晶邊界相接觸引起的,降低孿晶邊界密度對于獲得較大恢復應變至關重要。
振動在工程領域扮演著重要角色。Kumbhar等[47]提出了基于磁流變彈性體(MRE)的SMA,并由實驗證實了MRE-SMA材料可用作自適應吸振器的雙向剛度調節元件,通過同時改變溫度和磁場來調整組元剛度進而實現了吸振器相變區域的平滑調節,為消除振動提供了新思路。
1.2.4 其他領域研究進展
FeMnSi SMAs成本低,SM性能優異,一經問世就備受關注。Ghafoori等[48]對Fe17Mn5Si10Cr4Ni1(V,C)的循環應變和疲勞行為展開研究。通過循環拉伸試驗表征材料的拉伸力學性能,并就應變速率對循環加載實驗的影響進行分析,發現應變速率對合金應力應變行為有顯著影響。
固態制冷作為傳統壓縮制冷的有效替代方案,吸引了愈多目光。Bonnot等[49]研究了CuZnAl SMAs的熱彈性效應。Schmidt等[50]利用SMA開發了能獨立控制應力、應變速率等變量的彈性熱容式制冷的新型測試平臺,并對SMA熱彈性性能進行表征。Cui等[51]證實了NiTi合金絲在冷卻應用中的可行性。Moya等[52]發現NiTi材料提供的潛熱是22J/g,大于CuZnAl材料的6.2J/g,CuAlNi的6.8J/g。
SMA線和周圍基體間的弱界面結合強度使SMA線增強聚合物應用大為受限。Yuan等[53]提出了“機械壓痕”法,有效提高了SMA復合材料界面結合強度。拉拔實驗顯示,縮進SMA線的界面結合強度較手工磨砂SMA線提高了4.48~8.58倍。
1.3 SMA的應用
SMA研究進展所取得的累累碩果為實際工程應用奠定了堅實基礎,其在宇航、醫藥、機器人等領域表現出巨大潛力。
1.3.1 SMA在航空航天領域的應用
太陽能電力系統為太空探測任務的順利完成提供保障,為避免探測車進入洞穴或陽光照射不到區域后功能受到影響,Wang等[54]發明了一種環形可伸展鏡子結構,用于將太陽光反射到太陽能電池板,實現連續作業。這種鏡子結構主要依靠SMA驅動器來完成伸展,SMA絲可在低剛度狀態下完成結構變形,并能在變剛度結構冷卻過程維持變形,在不耗能情況下保持理想結構,如圖2所示。NASA近日公布了2020年新型火星車的設計細節,其輪胎將采用NiTi SMA制得的非充氣式網狀輪胎,該輪胎能記住自己最理想的形狀并在遇到外力后自動變形,并能于第一時間恢復原來形狀,因此將能承受更大變形與更多荷載,壽命大為延長。
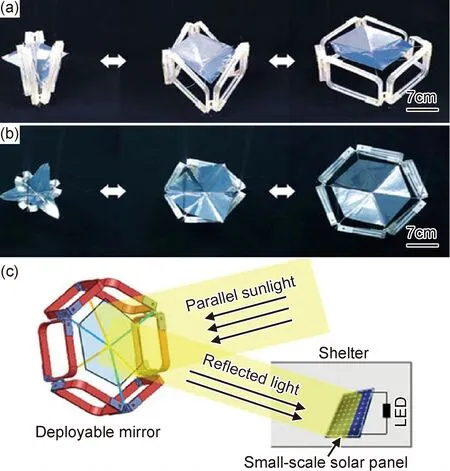
圖2 可伸展鏡子的左、俯視圖(a),(b)和反射原理示意圖(c)[54]Fig.2 Oblique and top down views (a),(b) and reflecting theory diagram of the deployable mirror(c)[54]
Brailovski等[55]設計了一種可變形層流機翼(MLW),通過改善機翼外層的層流狀態而降低飛機燃料消耗和減少溫室氣體排放。亞音速巡航變形機翼由3部分組成,整體結構變形是SMA單元,偏置彈簧和靈活拱背共同作用的結果,通過材料理想狀態的幾何變形可以提高空氣動力學效率,降低燃耗。
波音公司開發了含SMA制動器的智能鋸齒式氣動裝置VGC,并成功應用于777-300ER商用飛機。其V型排氣結構可通過SMA主動調節形狀。該裝置已被證明可通過最大化V形偏轉來減少起飛過程中產生的噪音,其余時間還能通過最小化V形彎曲來提高巡航效率。NASA的展向自適應機翼(SAW)項目近期取得了一定進展,該項目利用創新型輕量級SMA實現飛機飛行中機翼外部組件的折疊,因不需要液壓系統驅動使其質量顯著減輕。溫度驅動下,利用復合管內的熱記憶進行移動并作為制動器,加熱后合金在管內實現扭轉運動并使得機翼外部完成上下移動。實驗表明通過加熱或冷卻SAW驅動器可使機翼面板在0°~70°之間變化,且機翼每次折疊都能在3min內完成。Dong等[56]通過將SMA彈簧布鋪設到機翼剛性翼盒與蒙皮之間并對合金彈簧進行加熱和冷卻處理,成功實現了翼形的調節。孟祥龍等[57]將NiTi合金用于衛星的減振防松和解鎖機構,超彈性NiTi合金制得的弧形板簧在衛星機箱中用于固定線路板,可防止發射時因振動而導致的電子器件破損,而高恢復應變則使得NiTi合金取代傳統爆炸解鎖,避免爆炸沖擊。
1.3.2 SMA在醫學領域的應用
磁共振成像(MRI)和軟體機器人被譽為下一代腦瘤診斷和治療的關鍵性技術。Kim等[58]研發了一種MRI相容性彈簧基微創治療柔性顱內機器人。內、外彈簧與主動冷卻SMA制動器通過腱驅動機制構成了整體結構。采用將壓縮氣流導入冷卻通道來保證SMA制動器的快速冷卻,該方法增大了驅動帶寬,而且冷卻機制結構緊湊,節省空間,可實現對每一制動器的精確控制。該機器人為腦科手術提供了更為有效的方案。
SMA醫用腔內支架經預壓縮變形后,能夠經過很小的腔隙安放到人體血管、消化道、呼吸道以及尿道等各種狹窄部位,支架擴展后形成一定形狀的骨架,在人體腔內支撐起狹小的腔道,起到很好的治療效果。AM制造的多孔NiTi裝置在細胞培養方面具有獨特優勢[59],將NiTi多孔支架進行8天的細胞培養后可在支架表面得到一層活細胞,這對于鹽性介質和載荷作用下干細胞的成骨活動意義重大。NiTi合金因自身良好的相容性還可用于制造凝血過濾器、骨折固定板和脊椎矯正棒等。
1.3.3 SMA在機器人行業的應用
Jin等[60]用SMA制造了一種能在惡劣環境工作的放射形五臂軟體多功能機器人。其能在地面以每秒0.7倍體長的速度爬行,在水中以2.5倍身長的速度游動,并能平穩抓取、移動自身質量15倍的脆性物品。Seok等[61]受寡毛類蠕蟲通過徑向和長度方向肌肉的收縮和擴展實現蠕動的啟發,將NiTi SMA線圈驅動器以螺旋狀包覆網管編織結構制備了蟲狀軟體爬行機器人,整體結構除電池和電路板均采用靈活的機械組元,避免了剛性連接件,具備了抗摔和越障功能。Bartlett等[62]將NiTi SMA結合液態金屬介電彈性體(LMEE)制造了軟體機器人的尾鰭,實現了驅動頻率、變形和持久性的大幅改善。
Loh等[63]設計了一種用于假肢手的新型SMA制動器,其出色地完成了手指屈曲和伸展動作。Gaissert等[64]研發了仿生蜻蜓,他們在翼長63cm的蜻蜓上配備了4個SMA制動器,用以保證頭部擺動和尾巴上下起伏的穩定性,這種飛行機器人具有13個自由度,可在半空盤旋并實現各種復雜運動。Kim等[65]基于SMA研發了仿生海龜軟體機器人,最大游動速度達22.8mm/s,他們的新款仿生龜的游動速度已經突破了11.5cm/s。
2 形狀記憶聚合物
形狀記憶聚合物(SMP)作為一種重要的刺激響應型聚合物,通過對聚合物進行分子組合和改性,在一定條件下賦予它們一定的初始形態。當受到光、熱等外部刺激時,其形狀會做出相應的變化并固定在變形態,隨著外部環境以特定規律和方式再次變化,材料能夠可逆地恢復到原始形態(如圖3所示)[66]。整個過程完成了“記憶起始態—固定變形態—恢復起始態”的循環,其形變量最大可達200%。

圖3 SMP在熱和光刺激下發生變形[66]Fig.3 Deformation of SMP under external thermal and light stimuli[66]
2.1 SMP歷史發展進程
聚合物的SME最早追溯到1941年,Vernon[67]在專利中指出甲基丙烯酸酯具有“彈性記憶”效應;1960年Charlesby[68]在《原子輻射與聚合物》一書中就輻射交聯聚乙烯的記憶效應現象進行了描述;20世紀60年代,聚合物的SME概念在商業產品中得到應用,主要以電絕緣熱收縮聚乙烯管的形式出現[69];1984年,法國CDF-Chimei(現今的ORKEM)公司成功開發了含有雙鍵和五元環交替鍵合的無定形聚降冰片烯,后由日本杰昂公司發現SME而投入市場。這被認為是SMP的首次官方應用[70]。SMP在近十年來得到了極大關注,投身此領域的專家學者迅速增加,各個方面的潛在應用不斷被發掘,在航空航天、生物醫藥等領域展示出優異性能。
2.2 SMP最新研究進展
2.2.1 SMP增材制造技術研究進展
4D打印是智能材料與3D打印的結合體,在3D打印基礎上增加了時間維度,即3D打印智能材料的結構在特定激勵下可隨時間發生變化,這種三維實體結構不再保持靜止、無生命,而是具備了動態、智能化特征[71]。4D打印引發了國內外廣大學者對于增材制造技術的新一輪研究熱潮。
Ding等[72]提出一種全新的直接4D打印技術,大大簡化了高分辨率復雜3D可重復編程結構的加工過程。他們采用由玻璃態SMP和光聚化彈性體組成的復合材料,經過加熱SMP變軟,彈性體的張緊應力得到釋放使得物體轉化為一種新的形狀,并且可通過編程實現形狀的多次改變。這種方法克服了先前4D打印時間久、過程復雜、需要支撐材料等缺陷,為產品設計提供了一種新的可能性。直接4D打印能夠打印多材料復合材料,將4D打印的5個步驟合為1個。
浙江大學Huang等[73]采用數字光投影型立體光刻技術實現了SMP的快速4D打印,成型時間只需20s。Qi等[74]提出利用多種材料3D打印技術來實現4D打印。他們使用SMP纖維來增強彈性基體,通過3D打印SMP纖維和有機聚合物基體,實現了二者的完美結合,制備了結構隨時間變化的智能材料。他們還將該智能材料與另一聚合物材料層結合制得了雙層結構,通過改變溫度實現了結構在原狀和彎曲變形間的自由轉換。Samuel等[75]用3D打印將SMP逐點累加固化到硬質基板,固化成型的SMP與基板緊密結合為平板結構,在溫度、電流等激勵下,SMP發生收縮或膨脹而使得平面結構變形為三維結構。Shaffer等[76]將聚乳酸與輻射敏化劑三烯丙基三聚異氰酸酯混合加工為絲狀,并用熔融沉積技術將其制備成復雜結構,γ射線引發了該結構的輻射交聯反應,形成了熱固性SMP,這種交聯結構的力學性能和變形能力較未交聯前得到大幅提升。
2.2.2 SMP在生物醫學的研究進展
具有特定表面濕度的材料在醫用領域表現不凡。Wang等[77]提出了基于SM石墨烯海綿的可調濕度滑移膜。他們用 SMP 包覆多孔石墨烯海綿來限定惰性潤滑劑,并建造滑移面來排斥各種不同液體。當液滴滑到覆蓋潤滑劑的壓膜表面,由于SM石墨烯膜在電刺激下的回彈效應,液滴便被滯留,使得潤滑劑浸入氣孔。因此SM石墨烯膜具備了可控的滑移特性和功能,很好地解決了使用醫用微孔板時需將不同液滴置入多個孔井的耗時,低效率和對人力的嚴苛要求。
生物醫療領域對溫度范圍的嚴苛要求限制了傳統熱致型SMP的發展。Chen等[78]合成了pH敏感型SMP膜。該膜在pH=1.3的酸性條件下呈帶狀,環境轉為pH=10時變形為環狀,隨pH值再變為1.3,結構也逐漸恢復帶狀。該SME可用作可逆開關來控制復雜生理環境中藥物的抓取與釋放。酸性環境下SMP膜展開為環狀并釋放藥物,堿性條件SMP膜呈環狀可用于藥物的抓取與傳遞。
Shen等[79]研制了具備多重SME的離子聚合物-金屬復合材料制動器,成功實現了電、熱雙重刺激下的彎曲、扭轉、振蕩等復雜動作,首次同步實現制動器的多重輸入控制,分別獨立完成機-電驅動和熱-力驅動。加之該制動器優良的恢復力和柔韌度以及隨溫度而變化的電特性,促進了醫療事業的發展。
2.2.3 SMP在納米領域研究進展
光子學的發展也面臨著與其靈活性、多功能性和智能開關機制相關的重大挑戰。Li 等[80]就此提出了一種具有熱感應光束功率分配器功效的新型可編程SM聚苯乙烯薄膜。通過將雙面SM聚苯乙烯薄膜構造成可擦除和可切換的微槽光柵,借助形變微光柵在整個熱激活恢復過程中的光學衍射效應,透射光從一個設計的分光方向和光束功率分布切換到另一個。這一原理得到了實驗驗證,可進一步擴展微/納米光電子器件,實現納米光學中的新功能。Xu等[81]用PDMS轉印技術在SMP表面完成了透射光柵微納結構陣列的復刻工作,并通過加熱對樣品進行拉伸、壓縮變形,冷卻后形狀得到固定,重新加熱后結構恢復到初始陣列形狀,光學特性也實現了回復,實現了光學性能的調諧作用。
Lu等[82]就碳納米纖維(CNF)和碳納米紙對SMP復合材料的形狀恢復的協同作用展開研究。他們將CNF和碳納米紙相結合來改善SMP的導熱性和導電性,通過碳納米紙涂覆SMP表面并通過電阻加熱進行致動,結果顯示SMP表面涂覆含有1.8g CNF的碳納米紙使得電阻率降低了1016倍。并且將CNF與SMP樹脂相混合來改善熱傳導率,促進從納米紙到底層SMP的熱傳遞效應,進而加速電化學反應。
2.2.4 其他領域研究進展
SMP自修復是工程界經久不衰的話題。Rodriguez等[83]研發了SM自愈系統。他們通過在ε-聚己內酯(PCL)表面旋涂環氧形狀記憶聚合物(ESMP)合成了SM輔助自愈功能的涂層薄膜。當發生破裂或損傷,PCL纖維就會融化并借助SME流向破損部位進行愈合。Wei等[84]基于ESMP和PCL制備了熱導雙向SM和自愈合復合材料。結果顯示23.3%的PCL含量可得到最佳整體性能,6次測試后形狀恢復率達98%,自愈能力隨溫度升高而增強,無外力作用下在玻璃化轉變溫度以上可得最佳愈合效果, 圖4從宏觀和微觀角度展現了單邊缺口彎曲樣本在三點彎測試后和熱愈合后的不同形貌。
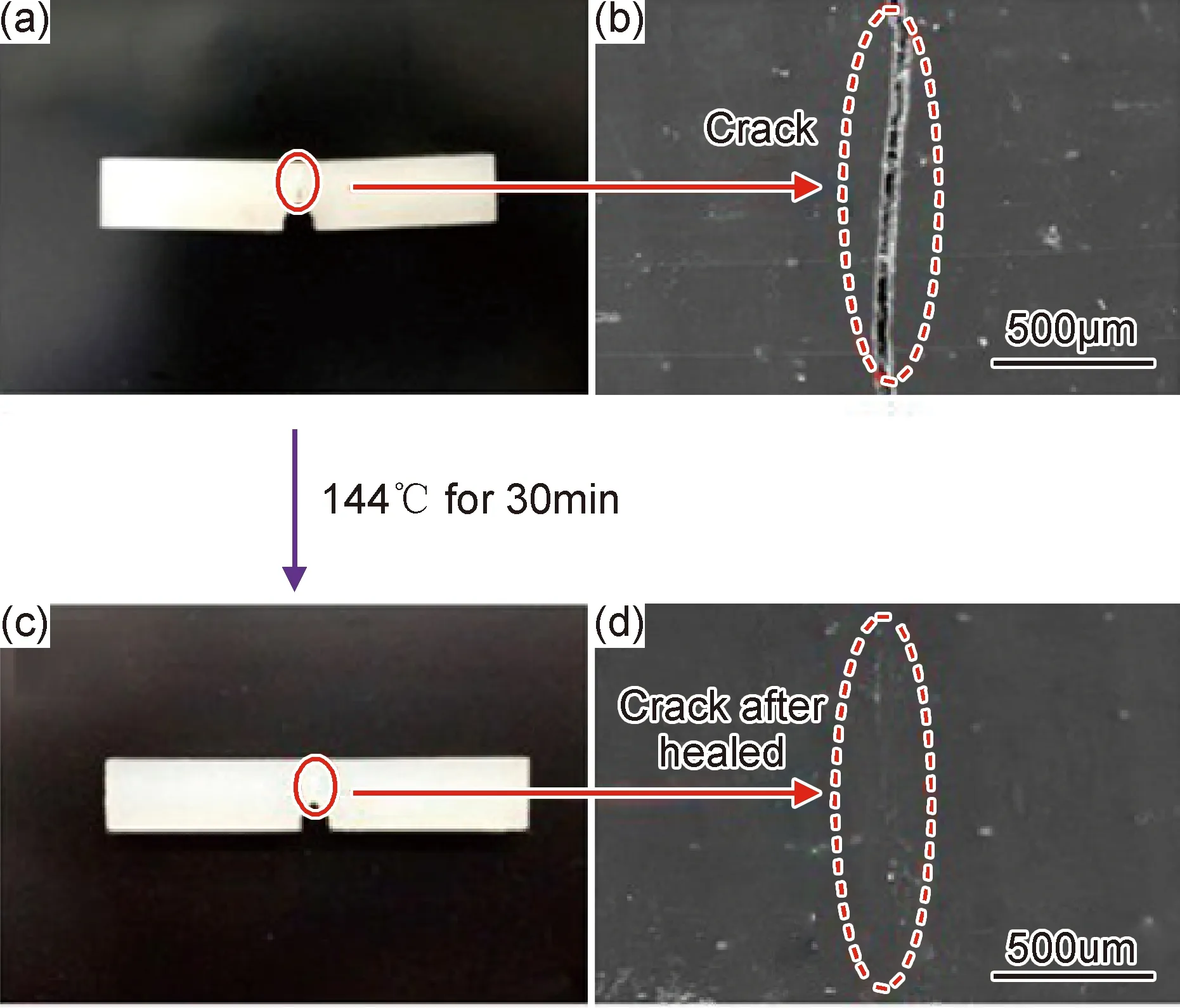
圖4 樣本裂紋自愈合恢復前(a),(c)后(b),(d)的宏觀圖像和掃描電鏡形貌[84]Fig.4 Macroscopic pictures and SEM images of specimen crawl before(a),(c) and after (b),(d) self-curing[84]
強度低、剛度小和導電性差已成為SMP發展面臨的難題。Leng等[85]采用混合顆粒和碳纖維填料作為增強材料來改善苯乙烯基SMP,該方法使得7%混合填料含量的SMP的機械強度和熱導電性分別較未加填料前提高了160%和200%;Rodriguez等[86]報道了一種熱固性SMP石墨,其所含的可再生材料經3D打印能成為隨時間和溫度變形的復雜結構(如圖5所示)。該結構質輕且具有良好的SM恢復能力。通過改變熱固性樹脂和碳納米纖維(CNF)填充物的含量,得到了力學性能、熱和導電性質各不相同的產品。Wei等[87]用Kevlar纖維、碳纖維和玻璃纖維分別制得了環氧SMP,結果顯示其強度和剛度都較原基體有顯著提高。Ohki等[88]發現聚氨酯SM復合材料中加入玻璃纖維使材料的拉伸強度得到了加強。

圖5 預編程啞鈴形(a)和熱刺激下恢復到圓柱狀(b)的3D打印支架[86]Fig.5 Programmed dumbbell shape(a) 3D stent and its cylindrical recovery (b) under thermal simulation[86]
熱固性SMP在橡膠態具有較低水平的應力和能量輸出值,阻礙了SMP的發展。Fan等[89]基于由機械變形或程序設計實現熵減功能的應力和儲能機制提出了借助拉伸鍵實現焓增效用的新型儲能機制,實現了恢復應力和能量輸出的極大飛躍。
2.3 SMP的應用
近年來SMP發展迅速,諸多難題得到切實解決,并在航空航天、醫用、機器人等領域均得到了廣泛應用。
2.3.1 SMP在航空航天領域的應用
哈爾濱工業大學的劉立武等[90-92]提出了基于SMP并由多個可伸縮單元和立方體連接端部組成的框架式空間可展開結構。可伸縮單元兩端分別與立方體端部的一個面相連接,形成了析架式的立方體空間可展開框架。構件加熱時SMP溫度升高,發生變形伸展,伸縮套筒隨之伸長,從而完成了立方體式空間可展開框架結構的展開過程。此外,他們還研究了彈性纖維增強SMP的制備方法和力學性能并利用該材料和主動蜂窩結構制備了不同類型的變形機翼結構。他們基于剪式變形機構制備的大尺度變后掠機翼在風洞實驗中實現了很好的氣動性能。
美國的CTD公司[93]研發了一種SM可展開天線。該型天線反射面呈旋轉拋物面,能收縮折疊成傘形結構。該公司還開發了由條狀SMP支撐的天線反射面,此天線反射面背面的上下邊緣處各固定連接有條狀SMP環向加強件。美國ILC Dover公司和Langley中心[94]聯合制備了一個充氣式月球居住站,其居住艙的框架全部使用了SMP,實現了結構折疊和充氣熱展開,以較小發射體積獲得了較大的使用體積。
2.3.2 SMP在醫用領域的應用
Rodriguez等[95]合成了SM聚氨酯泡沫用于顱內動脈瘤治療,解決了傳統鉑金支架慢性發炎,線圈收縮和腫瘤長大等因素造成的不穩定。通過將該泡沫植入豬的動脈瘤模型對生物相容性、局部凝血活性和作為充填材料的穩定性進行測試,結果表明這種材料完全符合臨床醫學的動脈腫瘤充填設備的需要,為血管內介入治療提供了新思路。圖6展現了SMP泡沫在動脈瘤充填進程的不同形態。

圖6 SMP泡沫在動脈瘤充填進程中的初始褶皺形狀(a),外部刺激下的中間形狀(b)以及最終完全擴展形狀(c)[95]Fig.6 Original crimped shape(a), and intermediate form via stimuli (b) and fully expanded terminal configuration of SMP foam(c) in the aneurysm filling process[95]
Zhao等[96]用SMP制備了新型骨折固定夾持裝置。使用前將固定器浸入高于SMP玻璃化轉變溫度的水中,待結構變軟烘干后將其貼合于骨折位置并冷卻到玻璃化轉變溫度以下,此時結構在釋放外部壓力后保持一定形狀,起到很好的夾持作用。
血栓會剝奪大腦的氧氣,引起缺鐵性中風,甚至引發永久性殘疾。Small等[97]開發了基于SMP的血管內激光治療裝置——血管血栓切除微制動器,以機械形式取回血栓,使血液恢復流向大腦,去除腦血栓的操作得到簡化。
Nakasima等[98]將SMP的弓形線應用在牙齒矯正,SMP產生的持續性的恢復力能牽引牙齒進行移動,達到治療效果。Jung等[99]通過熔融紡絲聚氨酯嵌段共聚物制備了用于正牙治療的SMP絲線,其能在一個月內保持0.7N的高形狀恢復力,足以矯正正畸測試中的不對準牙齒。Lendlein等[100]通過擠出成型的方式制得了聚己內酯SMP可降解手術縫合線,拉直和冷凍處理使其保持變形后的臨時形狀,溫度作用下該縫合線自發卷曲打結,實現了傷口縫合。Szewczyk等[101]提出的SMA智能導尿管具有很強的適用性。Abadie等[102]設計的SMA微型驅動器可用于內窺鏡。Zhang等[103]提出的SMA新型人造骨骼肌具備了致動、儲能和自感應等功能。
2.3.3 SMP在自折疊機器人方面的應用
Mu等[104]克服聚合物活性材料響應慢、操作形式過激等缺陷,將功能石墨烯氧化物作為基本單元構成了自折疊石墨烯紙。應用該石墨烯紙的裝置能達成預變形,執行行走、變角度等動作,并且該過程可通過柔光照射和加熱等方式實現遠程控制。抓持自身質量5倍的重物進行移動的仿生石墨烯已得到了實驗驗證,而且石墨烯微型機器人還能在狹小、密封環境中執行特定的爬行動作。
Felton等[105]設計了一種爬行機器人,如圖7(a),(b)所示,它的初始形態呈內嵌電子設備的板型結構,借助于能沿內嵌鉸鏈變形的SMP,可在4min內自發完成折疊組裝,并在無人工干預下執行動作,這為機電系統的快速原型制造以及太空中的衛星變形提供了切實依據。該課題組還使用3D打印技術將SMP與硬質基體材料相結合制備了自執行蠕蟲機器人,如圖7(c),(d)所示,通過控制蠕蟲的反復彎曲折疊變形成功實現了前進運動。Tolley等[106]采用了一種SMP驅動的線性層壓板結構設計,保證了機器人4條腿折疊動作的一致性,他們還通過改變參數實現了自折疊機器人線速度和角速度的精確控制,其線速度達到23cm/s,旋轉速率為2rad/s,如圖 7(e),(f)所示。

圖7 爬行機器人(a),(b)和蠕蟲機器人(c),(d)以及四足機器人(e),(f)在變形前、后的圖像[105-106]Fig.7 Images of crawling robot (a),(b) and worm robot (c),(d) as well as 4-feet robot (e),(f) before and after deformation[105-106]
3 結束語
迄今為止,SMM的發展已經跨越了多半個世紀,并且取得了長足進步,基于記憶機理,功能結構和應用范疇建立的研究框架也基本成型,但這個領域的研究同樣面臨一些發展難題:單一熱致型SMM逐漸不能滿足多元化的市場需求,SMM單一學科的發展面臨瓶頸,缺乏科學有效的研究手段,現實應用遠滯后于理論研究。未來SMM在分子設計、形狀恢復精度控制和實現產業化等方面具有光明的前景。具體可概述為以下幾個方面:
(1)開發新SMM,拓寬市場份額。打破傳統熱致型材料束縛,發現、研發更多的非熱致類型SMM(如磁場、光照、pH、濕度刺激響應型);積極尋求水凝膠和交聯半結晶聚合物之外其他的雙向記憶材料;探索更穩定高效的材料制造技術和加工工藝。
(2)與其他學科領域交叉互融,實現SME的高精度控制。4D打印技術將智能材料與3D打印相結合制備出更具智能化的結構,未來SMM與4D打印將碰撞出更加絢爛的火花;隨著發展深入,還將和其他領域的尖端科學交融,如面向柔性電子的SMM。
(3)建立更加完善的SMM本構模型,更加精確地模擬SM行為,實現從理論上準確預測材料性能。
(4)實現產業化。SMM前沿進展日新月異,但現實應用相對滯后,許多研究成果都沒有實現產業化,未來將更加注重尋求SMM潛在應用,推進產業化進程。
(5)新型增強SMM(納米顆粒增強材料等)的研究深度和廣度有待提高,未來會更加注重增強材料對產品性能的改善幅度并且追求成本的大幅降低。
(6)材料的復合化將是未來的發展趨勢之一,復合后的材料性能更加優良,功能更加強大,應用更加廣泛。
SMP和SMA已然躋身科技發展的最前沿,具有重要的實用價值和廣闊的應用前景[107]。作為一個充滿無限可能的領域,相信SMM在未來的研究中,依然能占據重要地位,給工業社會帶來更為深刻的變革,更好地為人類造福。
猜你喜歡
哲學評論(2021年2期)2021-08-22 01:53:34
中華詩詞(2020年1期)2020-09-21 09:24:52
中華詩詞(2019年7期)2019-11-25 01:43:04
模具制造(2019年3期)2019-06-06 02:10:54
小學生作文(中高年級適用)(2018年5期)2018-06-11 01:22:56
數學小靈通·3-4年級(2017年10期)2017-11-08 08:42:59
中學生數理化·七年級數學人教版(2017年11期)2017-04-23 07:18:00
數學大王·中高年級(2016年12期)2016-12-26 21:37:36
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
現代企業(2015年9期)2015-02-28 18:56:50
