基于視頻圖像方法推斷鑒定交通事故中車輛是否有闖紅燈行為
2018-08-21 10:36:54紀(jì)偉程剛
法制與社會 2018年20期
紀(jì)偉 程剛
摘 要 闖紅燈行為是導(dǎo)致道路交通事故的重要原因之一,也是事故責(zé)任認定的重要依據(jù)。當(dāng)監(jiān)控視頻只記錄車輛通過十字路口的部分過程,而未記錄其通過停止線時行駛方向上信號燈的狀態(tài)時,就無法直接判斷車輛是否有闖紅燈行為。文章采用視頻圖像計算車速和交通信號燈配時關(guān)系相結(jié)合的方法,介紹了鑒定此類情況下車輛是否有闖紅燈行為的一種思路,供同行參考。
關(guān)鍵詞 視頻圖像 車速 交通信號燈 闖紅燈
中圖分類號:D918 ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?文獻標(biāo)識碼:A ? ? ? ? ? ? ? ? ? ? ? ?DOI:10.19387/j.cnki.1009-0592.2018.07.144
隨著我國城市道路交通基礎(chǔ)設(shè)施的建設(shè)發(fā)展,越來越多的十字路口安裝了監(jiān)控攝像機,監(jiān)控視頻記錄的車輛行駛方向、行駛速度及車輛是否有闖紅燈行為等信息為交通事故司法鑒定和事故責(zé)任認定等工作開展提供了有力支持。但實際中,一個監(jiān)控視頻畫面一般無法同時記錄四個方向車輛行駛及信號燈變換的全部情況,當(dāng)監(jiān)控視頻只記錄車輛通過十字路口的部分行駛過程,而未記錄其通過停止線時行駛方向上信號燈的狀態(tài)時,就無法直接判斷該車是否闖紅燈,這向事故處理工作提出了新的難題。文章介紹了一種基于視頻圖像推斷鑒定交通事故中車輛是否有闖紅燈行為的方法,希望為同行提供借鑒。
一、方法內(nèi)容
方法的核心內(nèi)容是通過勘查實驗和測量計算獲取以下三個數(shù)值:
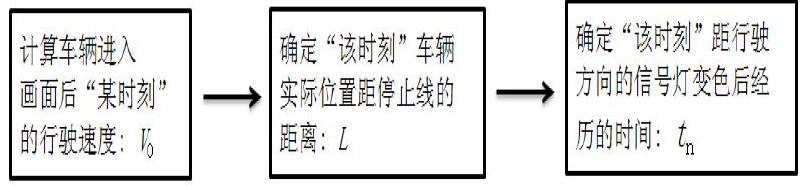
通過比較 0t0數(shù)值和L數(shù)值的大小關(guān)系,即可推斷車輛是否有闖紅燈行為。
首先,截取事故錄像視頻中某一幀畫面作為某一特定時刻,并取該畫面中車輛前邊緣標(biāo)定一條參照線。
根據(jù)《基于視頻圖像的車輛行駛速度技術(shù)鑒定》(GA/T 1133- 2014)介紹的方法,計算獲得車輛通過參照線時的行駛速度,作為 0(計算過程文章不做詳細介紹)。L值通過現(xiàn)場勘查實驗確定,監(jiān)控室和事故路口各一名工作人員,通過實驗視頻畫面與事故錄像畫面對比還原,確定參照線至停止線內(nèi)側(cè)(考慮停止線寬度)的實際距離,即為L值。確定t0值時有兩種情況,一種是監(jiān)控視頻直接記錄行駛方向信號燈狀態(tài),那直接計算行駛方向信號燈變色至車輛行駛至參照線位置經(jīng)歷的時間即為t0;另一種情況是監(jiān)控視頻未記錄行駛方向信號燈狀態(tài),只記錄了行駛方向垂直方向的信號燈變換狀態(tài),此時需要通過交通管理相關(guān)部門協(xié)助或根據(jù)現(xiàn)場實驗獲取兩個方向信號燈配時關(guān)系,然后通過垂直方向信號燈變換時間推算t0值。
二、采用該方法時應(yīng)滿足的條件
(一)監(jiān)控探頭角度未發(fā)生改變
現(xiàn)場勘查實驗時,監(jiān)控探頭的角度應(yīng)與事故時保持一致,以保證還原確認特定時刻參照線實際位置的準(zhǔn)確性,若監(jiān)控探頭的角度事故后發(fā)生改變,需進行調(diào)節(jié)還原,但該操作可能增加數(shù)據(jù)測量的誤差。
(二)監(jiān)控視頻畫面質(zhì)量滿足條件
監(jiān)控視頻圖像畫面應(yīng)滿足《基于視頻圖像的車輛行駛速度技術(shù)鑒定》(GA/T 1133-2014)關(guān)于車速計算的要求,即圖像清晰不晃動,能分辨車體特征;畫面幀率穩(wěn)定且?guī)g變化均勻;可以添加參照線,可以明確參照距離。
(三)被鑒定車輛無明顯的加、減速過程
該方法的實際是獲得車輛進入監(jiān)控畫面后某時刻的行駛速度后,再假設(shè)車輛以該速度通過十字路口,從而推斷其是否有闖紅燈行為。該假設(shè)的依據(jù)是,經(jīng)多起案件實際勘查,車輛進入監(jiān)控畫面的實際位置距停止線的距離一般為5m~20m,根據(jù)速度距離公式 2=2as,即車輛在短距離內(nèi)不會有較大的速度變化,加速性能極好的車輛除外。所以車輛有加速、減速過程,會對推斷結(jié)果產(chǎn)生影響,當(dāng)車輛有明顯的加速、減速過程,尤其是減速過程時,該方法不適用。
三、案例分析
(一)案例一
某十字路口,由南向北行駛的三輪摩托車與由東向西行駛的轎車碰撞,發(fā)生交通事故。監(jiān)控視頻只記錄東西方向東側(cè)信號燈狀態(tài)和三輪摩托車通過路口的部分過程,鑒定事故前三輪摩托車是否有闖紅燈行為。
1.案情分析
本案事故導(dǎo)致三輪摩托車駕駛員死亡,兩車損壞;事故定責(zé)中,該路口有交通信號燈,且無讓行標(biāo)志的前提下,是否有闖紅燈行為應(yīng)是事故定責(zé)中需要考慮的首要因素,加之通過計算可知事故中兩車均未超速行駛,且通過圖像比對已經(jīng)確定肇事轎車不存在闖紅燈行為,因此三輪摩托車是否存在闖紅燈行為成為了本案事故定責(zé)的唯一依據(jù)。從當(dāng)?shù)亟痪块T了解的情況是,基于本案情況,若三輪摩托車也不存在闖紅燈行為或無法確定三輪摩托車是否存在闖紅燈行為,那么事故定責(zé)可能按照三輪摩托車和轎車負“同等責(zé)任”進行劃分;若能確定三輪摩托車有闖紅燈行為,那么事故定責(zé)可能按照三輪摩托車負“全部責(zé)任”,轎車“無責(zé)任”進行劃分。
2.對三輪摩托車是否存在闖紅燈行為進行分析
以監(jiān)控視頻畫面顯示時間“12:35:25”第25幀,三輪摩托車前邊緣標(biāo)定參照線。經(jīng)計算,三輪摩托車通過參照線的行駛速度 0≈12.0m/s。經(jīng)現(xiàn)場勘查實驗測量,參照線距南側(cè)停止線內(nèi)側(cè)的距離L≈13.70m。通過調(diào)取事發(fā)路口信號燈控制器配時信息,得到路口信號燈配時關(guān)系為:東西方向信號燈紅燈熄滅、綠燈亮起瞬間,南北方向信號燈狀態(tài)為黃燈熄滅、紅燈亮起瞬間;東西方向信號燈黃燈熄滅、紅燈亮起瞬間,南北方向信號燈狀態(tài)為紅燈熄滅、綠燈亮起瞬間;東西雙方向信號燈同步,南北雙方向信號燈同步;東西雙方向直行及左轉(zhuǎn)紅燈30秒,綠燈33秒,黃燈2秒;南北雙方向直行及左轉(zhuǎn)紅燈35秒,綠燈28秒,黃燈2秒。
監(jiān)控視頻畫面顯示,東西方向綠燈點亮(即南北方向紅燈點亮)t0≈0.3s后,三輪摩托車到達參照線位置;可推算,南北方向黃燈點亮2.3秒后,三輪摩托車到達參照線位置,t1≈2.3s。
0t0≈3.6m<L
0t1≈27.6m>L
因此,三輪摩托車未闖紅燈,但闖了黃燈。
(二)案例二
某十字路口,由東向西行駛的三輪摩托車與北向南行駛的轎車碰撞,發(fā)生交通事故。監(jiān)控視頻只記錄南北方向南側(cè)信號燈狀態(tài)和兩車通過路口部分過程,鑒定事故前兩車是否有闖紅燈行為。
1.案情分析
本案事故導(dǎo)致三輪摩托車駕駛員死亡,兩車損壞;事故定責(zé)中,該路口有交通信號燈,且無讓行標(biāo)志的前提下,是否有闖紅燈行為應(yīng)是事故定責(zé)中需要考慮的首要因素,加之通過計算可知事故中兩車均未超速行駛,因此兩車是否存在闖紅燈行為成為了本案事故定責(zé)的唯一依據(jù)。從當(dāng)?shù)亟痪块T了解的情況是,基于本案情況,無法確定兩車否存在闖紅燈行為,那么事故定責(zé)可能按照三輪摩托車和轎車負“同等責(zé)任”進行劃分;若能確定一方有闖紅燈行為,那么事故定責(zé)可能按照闖紅燈一方負“全部責(zé)任”,另一方“無責(zé)任”進行劃分。
2.對兩車是否存在闖紅燈行為進行分析
以監(jiān)控視頻畫面顯示時間“23:03:12”第17幀,三輪摩托車前邊緣標(biāo)定參照線1。經(jīng)計算,三輪摩托車通過參照線1的行駛速度 01≈11.4m/s。經(jīng)現(xiàn)場勘查實驗測量,參照線1距東側(cè)停止線內(nèi)側(cè)的距離L1≈10.70m。經(jīng)現(xiàn)場實驗,路口信號燈配時關(guān)系為:南北方向黃燈熄滅、紅燈亮起瞬時,東西方向綠燈亮起;南北方向紅燈熄滅、綠燈亮起瞬時,東西方向黃燈熄滅、紅燈亮起。
監(jiān)控視頻畫面顯示,南北方向綠燈點亮(即東西方向紅燈點亮)t01≈1.2s秒后,三輪摩托車到達參照線1位置。
01t01≈13.68m>L1
因此,三輪摩托車闖紅燈了。
以監(jiān)控視頻畫面顯示時間“23:03:13”第15幀,轎車前邊緣標(biāo)定參照線2。經(jīng)計算,轎車通過參照線2時的行駛速度 02≈12.6m/s。經(jīng)現(xiàn)場勘查實驗測量,參照線2距北側(cè)停止線內(nèi)側(cè)的距離L2≈7.60m。
監(jiān)控視頻畫面顯示,東西方向綠燈點亮t02≈1.7s秒后,轎車到達參照線2位置。
02t02≈21.42m>L2
因此,轎車未闖紅燈。
四、討論
熟練掌握文章介紹的方法思路后,可類推解決許多車輛通過十字路口時信號燈狀態(tài)問題。鑒定過程中,還可能遇到因十字路口監(jiān)控探頭左右偏轉(zhuǎn)和上下傾角的變化,導(dǎo)致畫面只記錄某方向信號燈狀態(tài)或只記錄停止線畫面等。但只要能準(zhǔn)確找出文中提到的幾個重要參數(shù)的數(shù)值及關(guān)系,也許問題就能迎刃而解。但值得強調(diào)的是,當(dāng) 0t0的數(shù)值與值十分接近時,由于無法排除方法誤差,此時下結(jié)論應(yīng)更加謹(jǐn)慎。
參考文獻:
[1]中華人民共和國道路交通安全法.人民日報.2011-08-06(006).
[2] GA/T 1133-2014.基于視頻圖像的車輛行駛速度技術(shù)鑒定.北京:中華人民共和國公安部.2014.
[3]聶秀珍.基于PLC的交通燈控制.智能計算機與應(yīng)用.2018,8(1).
[4]王向陽.交通事故的車速鑒定與參數(shù)研究.科技風(fēng).2017(5).
[5]邱冉冉.基于監(jiān)控視頻圖像的交通事故車速計算方法研究.吉林大學(xué).2017.