基于STC12C5A的雙足機器人設(shè)計
2018-08-22 19:35:16陳長菊曾星陳忠
科學(xué)與財富 2018年20期
陳長菊 曾星 陳忠
摘要:本文介紹了一種雙足機器人設(shè)計方法,采用STC12C5A60S2單片機作為主控芯片。該系統(tǒng)由單片機最小系統(tǒng)、穩(wěn)壓驅(qū)動模塊、舵機模塊、傳感器模塊等模塊構(gòu)成,機器人通過面陣CCD光電傳感器模塊和光電開關(guān)采集數(shù)據(jù),經(jīng)過主控芯片處理數(shù)據(jù)來進行路況判斷,由單片機調(diào)整pwm波占空比改變舵機的運動狀態(tài),從而達到控制機器人運動狀態(tài)的目的。傳感器的加入使系統(tǒng)具有良好的魯棒性。通過光電管檢測遇到的障礙物,然后進行轉(zhuǎn)彎,避免撞上障礙物。
關(guān)鍵詞:STC12;舵機;面陣;CCD;光電管
1 引言
隨著社會的發(fā)展、生產(chǎn)力的提高,機器人與自動化技術(shù)越來越成為熱門的研究領(lǐng)域。在機器人的移動方式中,如果選擇步行,那么在運動過程中還要考慮機器人是否會跌倒,所以雙足步行機器人幾乎是最難設(shè)計的。本文接下來將會介紹一種簡單的雙足機器人設(shè)計,該機器人可以根據(jù)路況調(diào)整自己的運動方向、運動速度等。
2 系統(tǒng)方案論證
從控制器模塊、舵機模塊、電源模塊、傳感器模塊和避障模塊5個方面進行系統(tǒng)論證。
2.1 控制器模塊的論證和選擇
方案1:采用STC89C51作為系統(tǒng)控制器。它的技術(shù)成熟,成本低。STC89C51為八位單片機,數(shù)據(jù)轉(zhuǎn)換速度慢,且實時性不好,難以實時實現(xiàn)復(fù)雜的控制算法,不利于高精度的控制。
方案2:采用Freescale最新一系列32為單片機,MKL26Z256VLL4具有豐富的外設(shè)資源和優(yōu)異的處理性能。它由標(biāo)準(zhǔn)片上外圍設(shè)備組成,Cortex-M0+內(nèi)核,256KB的Flash存儲器、32KB的RAM、兩個異步串行通信接口、兩個串行外圍接口,DMA模塊,TPM、LPTM定時器模塊,一組6通道的輸入捕捉或輸出捕捉的增強型捕捉定時器、兩組8通道10路模數(shù)轉(zhuǎn)換器、6通道脈寬調(diào)制模塊、一個字節(jié)數(shù)據(jù)鏈路控制器、29路獨立的數(shù)字I/O接口、20路帶中斷和喚醒功能的數(shù)字I/O接口、5個增強型CAN總線接口,單片機內(nèi)的鎖相環(huán)電路可使性能和能耗適應(yīng)具體操作的需要。
方案3:STC12C5A60S2/AD/PWM 系列單片機是單時鐘/機器周期(1T)的單片機,是高速/低功耗/超強抗干擾的新一代8051單片機,指令代碼完全兼容傳統(tǒng)8051,但速度快8-12倍。內(nèi)部集成MAX810專用復(fù)位電路,2路PWM,8路高速10位A/D轉(zhuǎn)換(250K/S,即25萬次/秒),針對電機控制,強干擾場合,此芯片便于運用,功能能夠滿足雙足機器人功能的實現(xiàn),且其相較于MKL26Z256VLL4成本較低。
綜上,該系統(tǒng)需要獨立的脈寬調(diào)制模塊,出于對系統(tǒng)高效、節(jié)能等方面的考慮選擇方案3。
2.2 舵機論證與選擇
方案1:采用DS3115舵機,扭矩15kg/cm,工作電壓4.8V-7.2V,重量較輕。
方案2:采用SG90舵機,扭矩較小,但重量僅為9g,利于機器人的行走靈敏。
綜上,考慮到機器人整體的重量,扭矩過小無法承受將近1kg的機器人,所以選擇有較大扭矩的DS3115舵機更為可行,選擇方案1。
2.3 電源模塊論證與選擇
方案1、采用開關(guān)電源供電,其優(yōu)點是能夠提供穩(wěn)定的5V電壓,但是占用資源過大,且要求獨立的系統(tǒng)供電。
方案2、采用8V獨立電源進行供電,通過穩(wěn)壓芯片AMS1117-5將8V電源電壓轉(zhuǎn)變成5V提供給舵機和單片機等芯片。
綜上,方案2符合制作要求,多路分別供電,更易控制,選擇方案2。
2.4 傳感器模塊論證與選擇
方案1、灰度傳感器。通過灰度傳感器檢測地面環(huán)境。灰度傳感器是模擬傳感器,有一只發(fā)光二級管和一只光敏電阻,安裝在同一面上,灰度傳感器利用不同顏色的檢測面對光的反射程度不同,光敏電阻對不同檢測面返回的光其阻值也不同的原理進行顏色辨別,從而控制機器人的運動。
方案2、通過面陣CCD光電傳感器采集地面信息,使機器人安全行走。面陣CCD光電傳感器按一定的分辨率,以隔行掃描的方式采集圖像上的點,當(dāng)掃描到地面某點時,就通過圖像傳感芯片將該點處圖像的灰度轉(zhuǎn)換成與灰度一一對應(yīng)的電壓值。從而控制機器人的運動。
綜上,由于地面環(huán)境錯綜復(fù)雜,灰度傳感器判斷范圍過小,無法準(zhǔn)確判斷復(fù)雜情況,而面陣CCD光電傳感器能夠檢測一大片區(qū)域,檢測結(jié)果更加準(zhǔn)確也更加穩(wěn)定。為實現(xiàn)良好的準(zhǔn)確性和穩(wěn)定性.選擇方案2。
2.5 避障模塊論證與選擇
方案1、采用HC-SR04超聲波模塊,該模塊可提供2cm-100cm的非接觸式距離檢測功能,測距精度可達高到3mm.但是程序比方案2復(fù)雜。
方案2、把一只光電開關(guān)裝在雙足機器人的足上,安裝簡易,程序控制簡單,可以檢測到障礙物的存在,通過對障礙物的檢測來確定是否轉(zhuǎn)向躲避障礙物。
綜上,光電開關(guān)可以滿足設(shè)計需求,超聲波模塊價格過于昂貴且編程復(fù)雜,所以選擇方案2。
3 系統(tǒng)設(shè)計
雙足機器人的結(jié)構(gòu)是所有部件的載體也是設(shè)計雙足機器人的最基本的和首要的工作。它必須能夠具有像人一樣前進、轉(zhuǎn)彎、避障等基本功能,因此自由度的配置必須合理。
首先分析雙足機器人的運動過程和行走步驟:重心右移(先右腿支撐)、左腿抬起、左腿放下、重心移到雙腿中間、重心左移、左腿放下、重心左移、右腿抬起、右腿放下、重心移到雙腿間,共分8個階段。從機器人的行動步驟來看,每條腿的自由度至少需要兩個,才能滿足系統(tǒng)設(shè)計的要求。
1、舵機:本系統(tǒng)為四個自由度,共采用4個舵機參與機器人的拐彎、前行等運動;
2、傳感器的設(shè)計安裝:本系統(tǒng)共采用了兩種傳感器:面陣CCD光電傳感器和光電管,面陣CCD光電傳感器用來循跡,安在機器人的雙足上;光電管用來檢測障礙,在機器人兩側(cè)各安置1個;
3、系統(tǒng)電路板的固定:系統(tǒng)電路板采用膠接的方式與機器人主體連接在一起;
4、架體支撐系統(tǒng):本系統(tǒng)兩足用了輕便材料鋁板,足底摩擦力適中,既能支撐起4個舵機、1塊電池和系統(tǒng)板的重量,還使機器人總體質(zhì)量較輕,利于機器人的快速行走;
5、頭頸結(jié)構(gòu)設(shè)計:頭頸部分是系統(tǒng)的中樞,PCB板上焊有穩(wěn)壓驅(qū)動系統(tǒng),舵機控制端子、傳感器端子等。
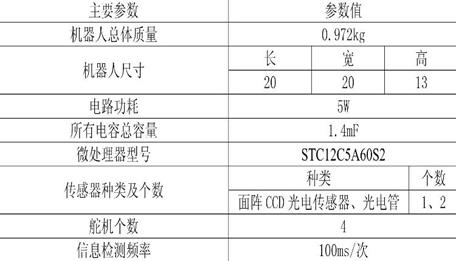
4 機器人主要參數(shù)匯總報告
參考文獻:
[1]閻石.數(shù)字電子技術(shù)基礎(chǔ)(第五版)[M].北京:高等教育出版社,2009
[2]黃智偉,王彥,陳文光等.全國大學(xué)生電子設(shè)計競賽訓(xùn)練教程[M].北京:電子工業(yè)出版社,2007
[3]聶榮等,實例解析PCB設(shè)計技巧[M].北京:機械工業(yè)出版社,2006.
[4]張睿.零點工作室.Altium Designer 10.0原理圖與PCB設(shè)計[M].北京:電子工業(yè)出版社.2007
[5]梅曉榕,柏桂珍,張卯瑞,自動控制元件及線路(第四版).北京:科學(xué)出版社,2008.
