改進的遺傳算法在機器人運動學中的應用
2018-08-23 09:29:26沈婷婷
時代農機 2018年6期
關鍵詞:模型
沈婷婷
(山東科技大學,山東 青島 266590)
1 機械手簡介
機械手主要由執行機構、驅動機構和控制系統三大部分組成。
2 建立模型
2.1 采取改進的遺傳算法來優化機械手求逆解的問題
利用現有數據建立機械手運動模型:
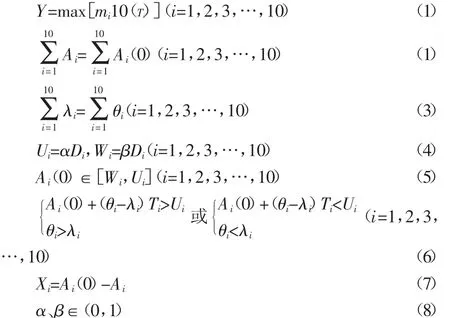
式(1)為模型的目標函數。
2.2 根據模型的特點設計相應的遺傳算法進行求解
(1)初始化群體。每個機械手運動的逆解采用如下方式計算和生成:

式中[ ]為取整函數;R為[0,1]內的隨機數。
設置初始化進化代數為Gen=10。根據式(9)及式(10)生成一個初始種群作為第一代解。
(2)評價群體。
在本文中,適應度按如下公式計算:

(3)進行遺傳操作。①選擇。每次隨機選取兩個個體,分別計算其適應度,比較兩個個體適應度大小,從中選出適應度大的那個作為新個體,重復操作,直到選出的個體等于種群大小為止;②交叉。在文中采用單點交叉來計算新個體的基因。如不滿足,則重新選擇個體進行交叉操作;

③變異。根據模型約束條件,把突變點的位置限制在第1位到第n-1位之間。

對完成交叉操作的個體,還需根據式(13)再進行變異操作,從而得到最新一代種群。
(4)終止。當Gen=Maxgen時,遺傳算法終止;否則,Gen=Gen+1,轉到第3步,繼續循環。
2.3 MATLAB仿真結果
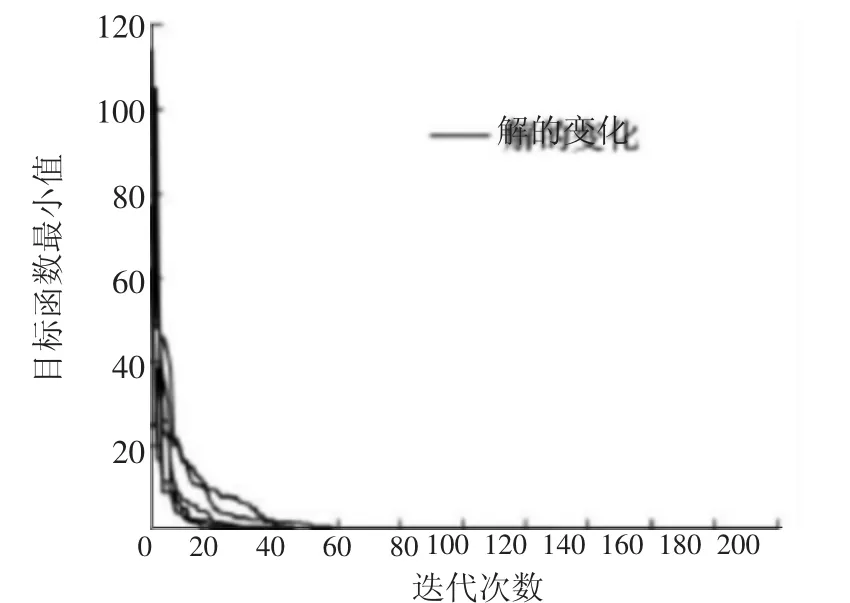
圖1 MATLAB仿真結果
由仿真結果可以看到,改進后的遺傳算法在進化到20代之前就已經基本上達到了最優解。
3 結語
針對平面關節型機器人的運動學進行建模分析,為了避免傳統機器人求逆解方法的多解性、解的不存在性以及需多解的選取的缺點,本文采用了改進的遺傳算法,算法的收斂速度更快,求解精度更高,穩定性更好。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
