基于專家系統(tǒng)的通信網(wǎng)全鏈路故障智能判讀
2018-08-23 03:22:18李斌成馬宇飛李培儒
無線電通信技術(shù) 2018年5期
李斌成,馬宇飛,李培儒
(中國(guó)電子科技集團(tuán)公司第五十四研究所,河北 石家莊 050081)
0 引言
衛(wèi)星通信網(wǎng)與地面有線網(wǎng)絡(luò)相連接組成了衛(wèi)星鏈路與有線鏈路混合的綜合通信網(wǎng)絡(luò),綜合通信網(wǎng)兩個(gè)地球站數(shù)據(jù)終端的端到端全鏈路包含了地面鏈路環(huán)節(jié)和衛(wèi)通鏈路環(huán)節(jié),全鏈路告警故障在故障層次、環(huán)節(jié)等方面的綜合判讀一直都比較困難。衛(wèi)星通信網(wǎng)絡(luò)管理中已實(shí)現(xiàn)了對(duì)衛(wèi)星地球站獨(dú)立的系統(tǒng)設(shè)備狀態(tài)及鏈路狀態(tài)的實(shí)時(shí)監(jiān)視,達(dá)到對(duì)設(shè)備及鏈路狀態(tài)的單獨(dú)監(jiān)視。隨著衛(wèi)星通信網(wǎng)絡(luò)的不斷發(fā)展,衛(wèi)星鏈路調(diào)度更加頻繁,衛(wèi)通網(wǎng)管理越來越復(fù)雜,對(duì)衛(wèi)通網(wǎng)運(yùn)行管理提出了更高的要求。尤其在通信網(wǎng)全鏈路告警故障自動(dòng)判讀方面提出智能化、自動(dòng)化、綜合化等要求,原來對(duì)系統(tǒng)設(shè)備、網(wǎng)絡(luò)局限于獨(dú)立設(shè)備的單個(gè)故障參數(shù)、獨(dú)立鏈路的單個(gè)故障參數(shù)的管理控制已不能滿足應(yīng)用對(duì)衛(wèi)通網(wǎng)自動(dòng)化、綜合化管控的要求。
為提高通信網(wǎng)全鏈路告警故障智能化、自動(dòng)化判讀水平,結(jié)合人工智能技術(shù)發(fā)展和CLIPS專家系統(tǒng)工具,通過構(gòu)建衛(wèi)通領(lǐng)域?qū)<抑R(shí)結(jié)構(gòu),設(shè)計(jì)基于CLIPS的通信網(wǎng)全鏈路告警故障自動(dòng)判讀專家系統(tǒng),實(shí)現(xiàn)通信網(wǎng)全鏈路告警故障自動(dòng)判讀。
1 傳統(tǒng)通信鏈路監(jiān)視的局限
1.1 局限性及分析
通信網(wǎng)告警管理實(shí)現(xiàn)了對(duì)設(shè)備、衛(wèi)星鏈路、地面有線鏈路等的獨(dú)立告警管理,但存在綜合化、自動(dòng)化不足的局限,通信網(wǎng)全鏈路告警故障無法自動(dòng)化判讀。傳統(tǒng)通信網(wǎng)鏈路告警故障判讀的不足主要表現(xiàn)在以下方面:
① 范圍不全,僅衛(wèi)星通信段,未含地面段;
② 層次單一,僅監(jiān)視Eb/N0,沒有關(guān)聯(lián)鏈路的故障自動(dòng)判讀;
③ 自動(dòng)化不足,發(fā)生鏈路中斷故障時(shí),通常通過人工去判讀;
④ 綜合化不足,發(fā)生鏈路中斷故障時(shí),通常僅檢查調(diào)制解調(diào)器接收Eb/N0性能,當(dāng)中斷時(shí)一般認(rèn)為是發(fā)送功率不足引起,不會(huì)綜合考慮鏈路多環(huán)節(jié)多種因素(收發(fā)支路設(shè)備故障、載波頻譜異常、地面鏈路設(shè)備、連線故障等)。
傳統(tǒng)通信鏈路告警故障的判讀局限,是告警監(jiān)視過程和通信鏈路告警的相互獨(dú)立造成的,系統(tǒng)設(shè)計(jì)時(shí)沒有仔細(xì)分析通信鏈路告警故障與鏈路背后關(guān)聯(lián)的設(shè)備、頻譜、地面鏈路環(huán)節(jié)等因素相關(guān)聯(lián),同時(shí)系統(tǒng)實(shí)現(xiàn)上也沒有應(yīng)用智能化手段,造成通信鏈路的告警故障判讀無法實(shí)現(xiàn)自動(dòng)、智能綜合判讀。同時(shí)由于多種調(diào)制解調(diào)設(shè)備解調(diào)門限不同,不同站上下行支路的鏈路組成性能也不同,也使傳統(tǒng)管理方法很難實(shí)現(xiàn)對(duì)全鏈路故障的綜合判讀。
1.2 解決思路
為了解決通信網(wǎng)全鏈路告警故障管理自動(dòng)化不足、綜合化不足等局限,一種方法是通過故障建模并將其判讀邏輯固化在軟件中;另一種方法是引入人工智能技術(shù),利用專家系統(tǒng)的智能化推理進(jìn)行告警故障的自動(dòng)判讀。
第一種方法雖然一定程度上也可實(shí)現(xiàn)故障自動(dòng)判讀,但判讀邏輯是固化的,擴(kuò)展不便。第二種方法借助人工智能技術(shù)實(shí)現(xiàn)故障智能化判讀,并可通過完善專家知識(shí)庫改進(jìn)判讀效果。為提高通信網(wǎng)全鏈路告警故障判讀智能化水平,設(shè)計(jì)了基于CLIPS專家系統(tǒng)的通信網(wǎng)全鏈路故障自動(dòng)判讀系統(tǒng)。
2 專家系統(tǒng)技術(shù)概述
2.1 專家系統(tǒng)組成原理
作為人工智能一個(gè)重要分支的專家系統(tǒng)(Expert System,ES)[1],一般認(rèn)為專家系統(tǒng)就是應(yīng)用于某一專門領(lǐng)域,由知識(shí)工程師通過知識(shí)獲取手段,將領(lǐng)域?qū)<医鉀Q特定領(lǐng)域的知識(shí),采用某種知識(shí)表示方法編輯或自動(dòng)生成某種特定表示形式存放在知識(shí)庫中;然后用戶通過人機(jī)接口輸入信息、數(shù)據(jù)或命令,運(yùn)用推理機(jī)構(gòu)控制知識(shí)庫及整個(gè)系統(tǒng),能像專家一樣解決困難的和復(fù)雜的實(shí)際問題的計(jì)算機(jī)(軟件)系統(tǒng)[2-3]。專家系統(tǒng)結(jié)構(gòu)如圖1所示。
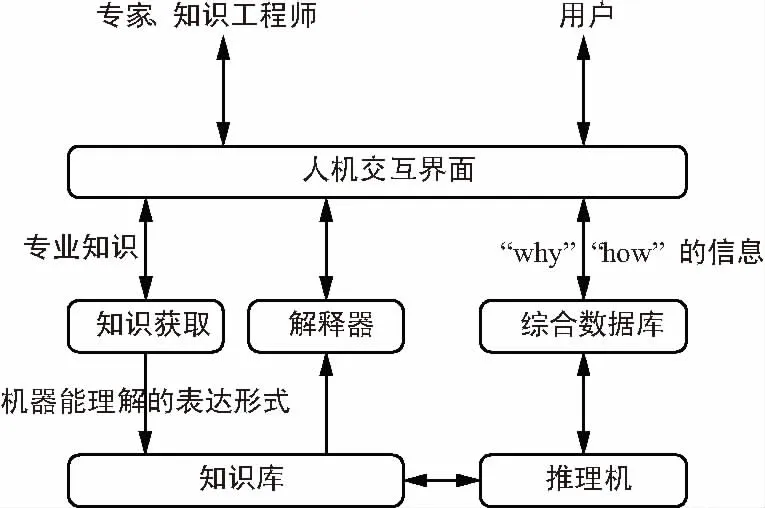
圖1 專家系統(tǒng)結(jié)構(gòu)
一個(gè)完整的專家系統(tǒng)由4個(gè)部分組成:知識(shí)庫、推理機(jī)、知識(shí)獲取部分和解釋接口。其中知識(shí)庫用來存放相關(guān)領(lǐng)域?qū)<姨峁┑膶iT知識(shí);推理機(jī)的功能是根據(jù)一定的推理策略從知識(shí)庫中選取有關(guān)知識(shí),對(duì)用戶提供的數(shù)據(jù)進(jìn)行推理,直到得到相應(yīng)的結(jié)論為止;知識(shí)獲取過程可以看作是一類專業(yè)知識(shí)到知識(shí)庫之間的轉(zhuǎn)移過程;人機(jī)接口則完成輸入輸出的人性化[4]。
2.2 CLIPS專家系統(tǒng)工具
CLIPS是“C語言集成產(chǎn)生式系統(tǒng)(C Language Integrated Prodution System)”的簡(jiǎn)稱。它是由NASA用C語言設(shè)計(jì)的用于開發(fā)基于規(guī)則的專家系統(tǒng)的專用工具[5-6]。CLIPS是一個(gè)通用的專家系統(tǒng)工具,有很強(qiáng)兼容性,可安裝在任何 C 編譯器上[7]。CLIPS平臺(tái)的基本結(jié)構(gòu)如圖2所示。
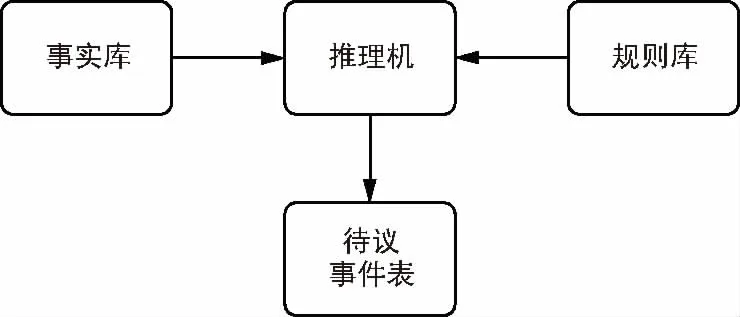
圖2 CLIPS平臺(tái)的基本結(jié)構(gòu)
CLIPS是用來開發(fā)基于規(guī)則的專家系統(tǒng),主要包括以下4個(gè)基本組成部分:知識(shí)庫(規(guī)則庫)包含所有的規(guī)則,存儲(chǔ)人類專家的知識(shí)和經(jīng)驗(yàn);事實(shí)表存儲(chǔ)推理使用的事實(shí)集合;推理機(jī)將知識(shí)庫中的規(guī)則前件和事實(shí)表進(jìn)行匹配,并授予規(guī)則優(yōu)先級(jí),輸出最高優(yōu)先級(jí)規(guī)則的后件即結(jié)論;議程(agenda)存儲(chǔ)知識(shí)庫規(guī)則與事實(shí)表匹配成功的規(guī)則即已激活的規(guī)則。圖2是最簡(jiǎn)單的 CLIPS 結(jié)構(gòu),一般還包括用戶界面、解釋機(jī)和知識(shí)獲取機(jī)。
CLIPS基于事實(shí)驅(qū)動(dòng)的正向鏈推理(從事實(shí)到結(jié)論的推理),即將事實(shí)表里的事實(shí)與知識(shí)庫中每一條規(guī)則的前件部分進(jìn)行匹配,匹配成功的多條規(guī)則放入議程表中,并授予每條規(guī)則優(yōu)先級(jí),執(zhí)行結(jié)果就是輸出議程表中優(yōu)先級(jí)高的規(guī)則的后件。
2.3 CLIPS嵌入技術(shù)
現(xiàn)在使用CLIPS進(jìn)行開發(fā)一般都是將 CLIPS嵌入到其他高級(jí)語言中實(shí)現(xiàn),其中CLIPS與CC++語言的混合編程是最易于實(shí)現(xiàn)的,也是最可靠的[3]。CLIPS嵌入技術(shù)主要有2種:直接嵌入法和動(dòng)態(tài)鏈接庫(DLL)嵌入法[8-9]。
2.3.1 動(dòng)態(tài)鏈接庫嵌入
動(dòng)態(tài)鏈接庫的嵌入方式需要在網(wǎng)上下載相應(yīng)的工具也可以自己編譯,這些工具包括動(dòng)態(tài)庫文件clip.dll以及包裝類CCLIPSWrap和說明文檔。使用動(dòng)態(tài)鏈接庫嵌入法的開發(fā)流程如下:
① 初始化CLIPS動(dòng)態(tài)庫CLIPSInit();
② 清空CLIPS工作區(qū)CLIPSClear();
③ 加載規(guī)則文件CLIPSLoad();
④ 復(fù)位知識(shí)庫CLIPSReset();
⑤ 加載事實(shí)表CLIPSLoadFacts();
⑥ 運(yùn)行CLIPS推理CLIPSRun();
⑦ 退出CLIPS釋放內(nèi)存CLIPSExit()。
使用動(dòng)態(tài)鏈接庫嵌入法的代碼和CLIPS源碼耦合度低,對(duì)用戶的要求相對(duì)較低,用戶不用了解CLIPS相關(guān)內(nèi)容,只需知道動(dòng)態(tài)庫提供的接口函數(shù)。
2.3.2 直接嵌入
直接嵌入法就是將CLIPS源碼(除了main.c文件外)嵌入到開發(fā)的項(xiàng)目中,這種方法是最簡(jiǎn)單直接的。以直接嵌入方式開發(fā)項(xiàng)目時(shí)必須在工程文件中添加支持 CLIPS 的頭文件 clips.h。直接嵌入法的開發(fā)流程如下:
① 將源碼加入工程;
② 加入頭文件聲明;
③ 聲明自定義函數(shù);
④ 編寫自定義函數(shù);
⑤ 啟動(dòng)CLIPS。
直接嵌入法使工程代碼與CLIPS源碼的耦合度較高,不便于以后的維護(hù)和修改,同時(shí)對(duì)開發(fā)用戶的要求高,需要用戶對(duì)CLIPS有相當(dāng)深入的理解。
上述2種 CLIPS嵌入方法各有千秋,本文采用動(dòng)態(tài)鏈接庫嵌入的方式來開發(fā)項(xiàng)目,將CLIPS內(nèi)核嵌入到C++主程序中以快速實(shí)現(xiàn)仿真環(huán)境,專注于CLIPS工具的領(lǐng)域應(yīng)用。
3 專家系統(tǒng)在告警判讀中的應(yīng)用
通過獲取通信網(wǎng)全鏈路領(lǐng)域知識(shí),并用CLIPS形式化表示知識(shí)結(jié)構(gòu),應(yīng)用CLIPS工具對(duì)通信網(wǎng)全鏈路告警故障進(jìn)行自動(dòng)判讀。
3.1 全鏈路故障判讀知識(shí)獲取
3.1.1 全鏈路故障分析
衛(wèi)通網(wǎng)全鏈路指從源站主機(jī)到目的站主機(jī)的端到端鏈路,全鏈路含義不僅包括源站衛(wèi)星調(diào)制解調(diào)設(shè)備到目的站衛(wèi)星調(diào)制解調(diào)設(shè)備間的衛(wèi)星通信鏈路,也包括源、目的站站內(nèi)從數(shù)據(jù)終端到衛(wèi)星調(diào)制解調(diào)設(shè)備的有線通信鏈路。通信網(wǎng)全鏈路是通信網(wǎng)拓?fù)涞幕窘M成單位,網(wǎng)內(nèi)全部鏈路的狀態(tài)一起組成了通信網(wǎng)全網(wǎng)網(wǎng)絡(luò)拓?fù)鋺B(tài)勢(shì)。
通信網(wǎng)全鏈路故障態(tài)勢(shì)表現(xiàn)為源站主機(jī)到目的站主機(jī)的端到端鏈路中斷或鏈路性能的降低,包括了地面有線鏈路的中斷和衛(wèi)星通信鏈路中斷等環(huán)節(jié),主要故障現(xiàn)象有“解調(diào)失鎖”、“Eb/N0過低異常”和“地面鏈路中斷”等。
造成衛(wèi)通鏈路解調(diào)失鎖有射頻或中頻設(shè)備故障(功放、低噪聲放大器、變頻器和調(diào)制解調(diào)器等)、調(diào)制發(fā)開關(guān)關(guān)閉、衛(wèi)通鏈路載波消失或被干擾等原因。造成解調(diào)器Eb/N0過低的原因有發(fā)端信號(hào)發(fā)送功率過低、載波頻譜被干擾等。地面有線鏈路中斷的原因大致有路由器、交換機(jī)、主機(jī)等設(shè)備故障和設(shè)備間連線故障等幾種。
3.1.2 故障樹模型
通過綜合分析、梳理形成圖3所示的故障樹模型。判定依據(jù)及和處置方法如表1所示。
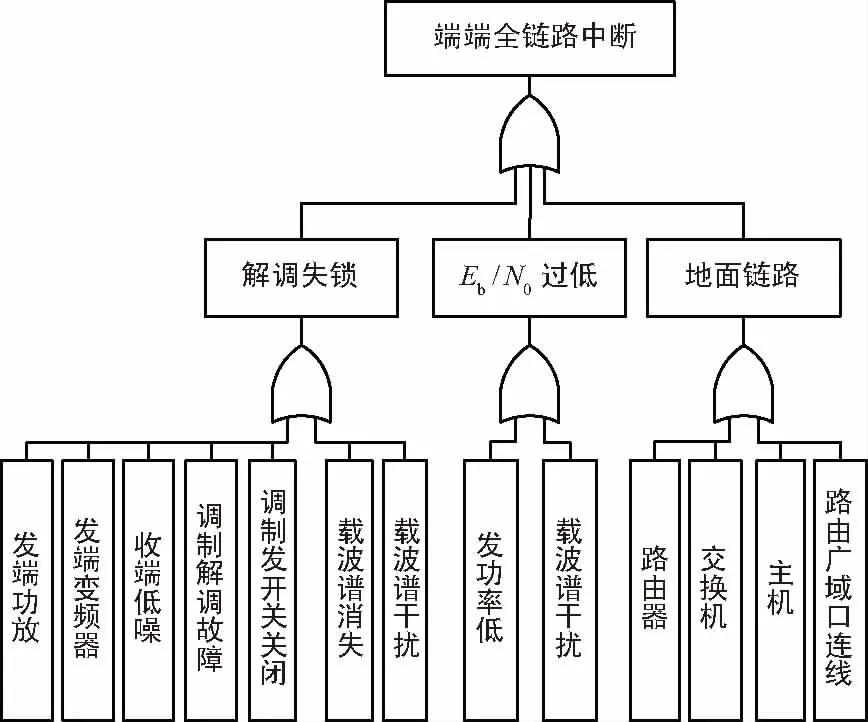
圖3 通信網(wǎng)全鏈路故障樹模型
表1 故障判定依據(jù)及處理措施
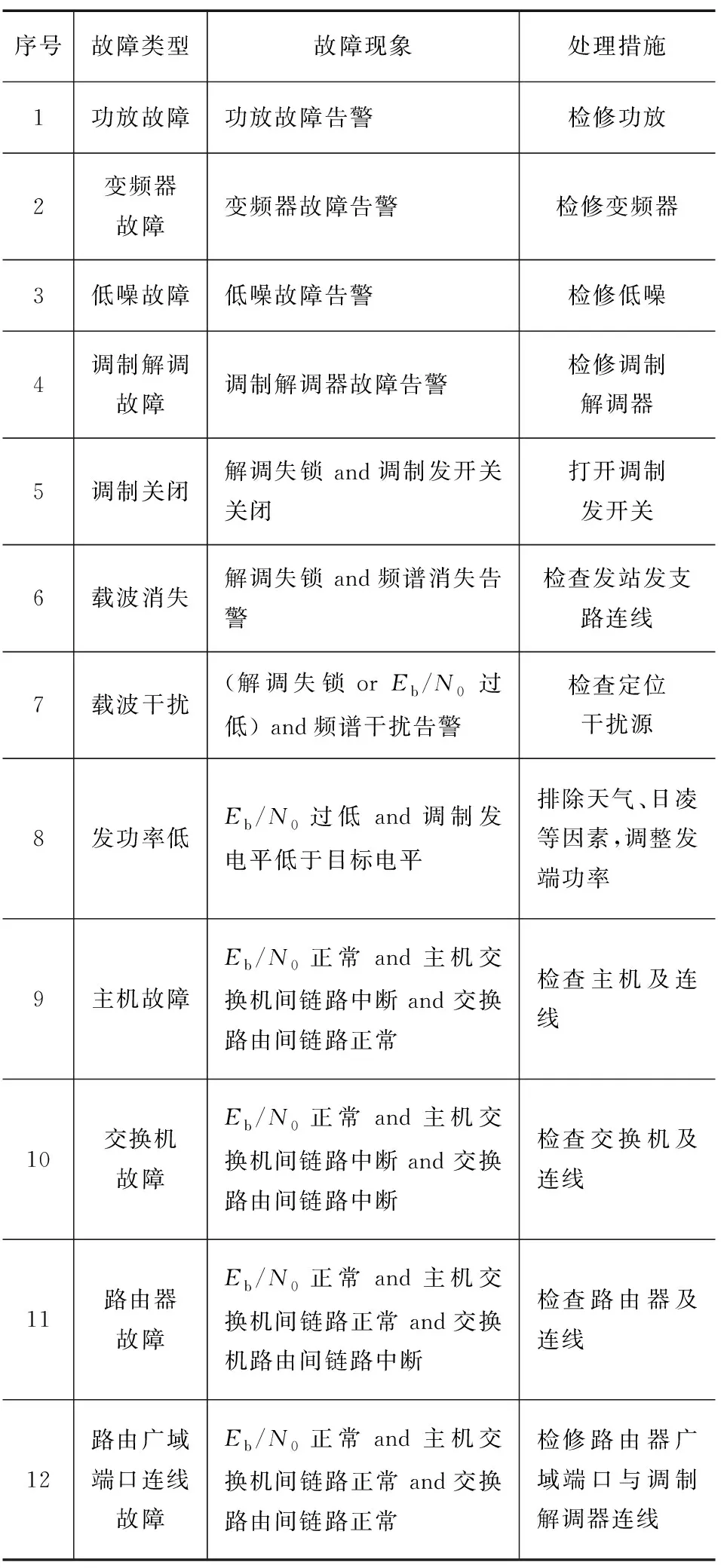
序號(hào)故障類型故障現(xiàn)象處理措施1功放故障功放故障告警檢修功放2變頻器故障變頻器故障告警檢修變頻器3低噪故障低噪故障告警檢修低噪4調(diào)制解調(diào)故障調(diào)制解調(diào)器故障告警檢修調(diào)制解調(diào)器5調(diào)制關(guān)閉解調(diào)失鎖 and調(diào)制發(fā)開關(guān)關(guān)閉打開調(diào)制發(fā)開關(guān)6載波消失解調(diào)失鎖 and頻譜消失告警檢查發(fā)站發(fā)支路連線7載波干擾(解調(diào)失鎖or Eb/N0過低) and頻譜干擾告警檢查定位干擾源8發(fā)功率低Eb/N0過低 and調(diào)制發(fā)電平低于目標(biāo)電平排除天氣、日凌等因素,調(diào)整發(fā)端功率9主機(jī)故障Eb/N0正常 and主機(jī)交換機(jī)間鏈路中斷 and 交換路由間鏈路正常檢查主機(jī)及連線10交換機(jī)故障Eb/N0正常 and主機(jī)交換機(jī)間鏈路中斷 and 交換路由間鏈路中斷檢查交換機(jī)及連線11路由器故障Eb/N0正常 and主機(jī)交換機(jī)間鏈路正常 and交換機(jī)路由間鏈路中斷檢查路由器及連線12路由廣域端口連線故障Eb/N0正常 and 主機(jī)交換機(jī)間鏈路正常 and交換路由間鏈路正常檢修路由器廣域端口與調(diào)制解調(diào)器連線
3.1.3 故障判定樹模型
故障樹對(duì)系統(tǒng)可能的故障原因進(jìn)行了分析,而判定引起故障具體原因則需要依據(jù)判定樹進(jìn)行。判定樹又叫決策樹,由結(jié)點(diǎn)和分枝組成[10,15]。結(jié)點(diǎn)分為根結(jié)點(diǎn)、判定結(jié)點(diǎn)和葉結(jié)點(diǎn),其中判定結(jié)點(diǎn)代表一個(gè)具體的問題或判定,葉結(jié)點(diǎn)代表判定結(jié)果或答案。判定推理過程實(shí)際就是判定樹的遍歷過程,從根節(jié)點(diǎn)開始,直到搜索到問題的正確答案,找到相應(yīng)的葉結(jié)點(diǎn)結(jié)束[11,16]。 本系統(tǒng)判定樹模型如圖4所示。

圖4 通信網(wǎng)全鏈路故障判定樹模型
3.2 知識(shí)庫構(gòu)建
3.2.1 知識(shí)表示
專家系統(tǒng)的優(yōu)勢(shì)就是通過處理專家提供的知識(shí)來解決現(xiàn)實(shí)問題。因而開發(fā)一個(gè)專家系統(tǒng)首先就是把專家的知識(shí)表示成推理機(jī)所能識(shí)別的形式。目前較常用的知識(shí)表示方法有 Petri 網(wǎng)、謂詞邏輯、語義網(wǎng)絡(luò)、產(chǎn)生式規(guī)則、框架等[12]。在CLIPS中知識(shí)的表達(dá)方式有產(chǎn)生式規(guī)則和框架兩種[13]:
① 產(chǎn)生式規(guī)則
產(chǎn)生式規(guī)則即IF…THEN…的表達(dá)形式,如果IF部分滿足則執(zhí)行THEN之后的動(dòng)作。
② 框架
框架(frame)是描述事物屬性的一種數(shù)據(jù)結(jié)構(gòu)。框架的知識(shí)表示形式是一種相互嵌套的結(jié)構(gòu),基本結(jié)構(gòu)如下:
(<框架名> (<槽名 1> (<側(cè)面名 1> (<值 1> …)…)…)
(<槽名 2> (<側(cè)面名 2> (<值 2> …)…)…)
……)
框架結(jié)構(gòu)具有模塊化的特點(diǎn),知識(shí)可擴(kuò)充性強(qiáng),適合表示復(fù)雜、層次明顯的知識(shí)。
通信網(wǎng)全鏈路告警故障判讀具有復(fù)雜性、多樣性和層次性,評(píng)估知識(shí)是因果關(guān)系的產(chǎn)生式規(guī)則形式。通信網(wǎng)全鏈路告警故障現(xiàn)象事實(shí)、故障判讀規(guī)則的前件事實(shí)和后件結(jié)論事實(shí)由框架事實(shí)來表示,即系統(tǒng)采用“框架+產(chǎn)生式規(guī)則”表示法來表示知識(shí)。在 CLIPS 中通過自定義模板deftemplate定義事實(shí)模板,通過自定義模板defrule定義推理規(guī)則,構(gòu)建領(lǐng)域?qū)<抑R(shí)庫。
規(guī)則構(gòu)成了邏輯推理的主要依據(jù),例如:
① Rule1:
功放故障告警
=>
功放故障
② Rule2:
變頻器故障告警
=>
變頻器故障
…
③ Rule9:
Eb/N0正常 and主機(jī)到交換機(jī)鏈路中斷 and 交換機(jī)到路由器鏈路正常
=>
主機(jī)故障或主機(jī)連線故障
…
一般先定義模板,再定義事實(shí)結(jié)構(gòu),然后建立規(guī)則并引用事實(shí)進(jìn)行推理。具體過程如下。
首先自定義3個(gè)模板結(jié)構(gòu)分別用于創(chuàng)建故障現(xiàn)象、判讀結(jié)果和處置措施3種事實(shí)。
(deftemplate fail-facts(slot phenomena))
(deftemplate eval-result(slot result) )
(deftemplate deal-means(slot means))
然后根據(jù)故障判定依據(jù)及處置措施編寫規(guī)則文件。在CLIPS中規(guī)則通過defrule命令建立,其一般格式為:“(defrule
通信網(wǎng)全鏈路故障判讀規(guī)則定義如下:
(defrule rule-1
(fail-facts(phenomena PA_Fault_Alert))
=>
(assert(eval-result(result PA_Fault))
(deal_means(means Inspect-PA)))
(defrule rule-2
(fail-facts(phenomenaConvertor_Fault_Alert))
=>
(assert(eval-result(result Convertor_Fault))
(deal_means(means Inspect-Convertor)))
……
(defrule rule-9
(and (fail-facts(phenomenaEbNo_Normal))
(fail-facts(phenomena HS2SW_Halt))
(fail-facts(phenomena SW2ROU_Normal)))
=>
(assert(eval-result(result HOST_Fault))
(deal_means(means Inspect-HostAndCable)))
……
上述規(guī)則文本保存在*.clp規(guī)則文件中,通過CLIPS工具的CLIPSLoad(
3.3 推理流程
專家系統(tǒng)中使用推理技術(shù)和控制策略進(jìn)行推理[14]。本系統(tǒng)采用正向推理方法,將通信網(wǎng)全鏈路故障判讀系統(tǒng)和鏈路各環(huán)節(jié)狀態(tài)(現(xiàn)象)監(jiān)視參數(shù)事實(shí)聯(lián)系起來,由已知的鏈路故障現(xiàn)象推斷出故障對(duì)象、原因及相應(yīng)處置措施。
CLIPS專家系統(tǒng)工具內(nèi)置強(qiáng)大的推理機(jī),自動(dòng)完成模式匹配、沖突消解、規(guī)則激活及執(zhí)行。對(duì)用戶而言只需根據(jù)以下流程依次完成:初始化、規(guī)則文件加載、故障事實(shí)輸入、運(yùn)行啟動(dòng)以及退出等簡(jiǎn)單操作。如果推理不成功沒有得到確定的故障判定結(jié)果,說明知識(shí)庫不完備,缺少相應(yīng)的知識(shí),需要對(duì)知識(shí)庫進(jìn)行完善。具體推理流程如圖5所示。
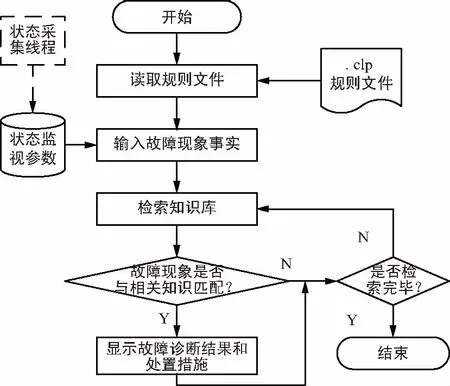
圖5 推理流程
3.4 CLIPS嵌入編程應(yīng)用
實(shí)用的專家系統(tǒng),除了要有較完備的知識(shí)庫和靈活強(qiáng)大的推理功能外,還應(yīng)具備強(qiáng)大的數(shù)據(jù)處理能力和友好的人機(jī)交互界面,而CLIPS的優(yōu)勢(shì)僅限于知識(shí)庫構(gòu)建和邏輯推理,因此需要和高級(jí)語言配合使用[11]。本文選擇C++作為主體語言,采用動(dòng)態(tài)鏈接庫嵌入的方式將CLIPS專家系統(tǒng)工具集成在系統(tǒng)中,C++主體程序主要代碼如下:
#include“clips.h”
CCLIPSWrap* theCLIPS;
theCLIPS=new CCLIPSWrap;//新建對(duì)象
theCLIPS->CLIPSInit();//初始化
theCLIPS->CLIPSLoad(
theCLIPS->CLIPSReset();//復(fù)位
theCLIPS->CLIPSAssert(
theCLIPS->CLIPSRun();//運(yùn)行
theCLIPS->CLIPSExit();//退出
4 仿真實(shí)驗(yàn)結(jié)果與分析
通過對(duì)包含衛(wèi)星網(wǎng)在內(nèi)的通信網(wǎng)全鏈路建模,設(shè)計(jì)實(shí)現(xiàn)了基于CLIPS的通信全鏈路告警故障自動(dòng)判讀系統(tǒng)及仿真實(shí)驗(yàn)平臺(tái)。如圖6所示,平臺(tái)由地面網(wǎng)絡(luò)狀態(tài)仿真軟件、衛(wèi)星站狀態(tài)仿真軟件、頻譜監(jiān)視仿真軟件、基于CLIPS的告警故障自動(dòng)判讀系統(tǒng)等組成。
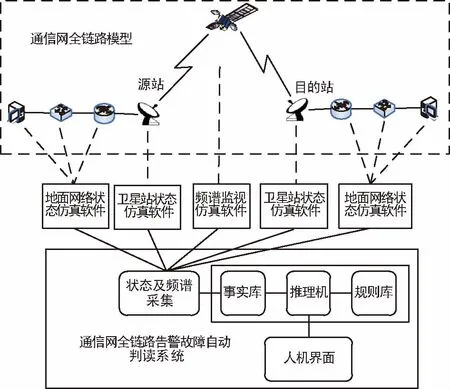
圖6 仿真實(shí)驗(yàn)平臺(tái)組成
仿真實(shí)驗(yàn)平臺(tái)中地面網(wǎng)絡(luò)狀態(tài)仿真軟件用于仿真地面鏈路部分(路由器、交換機(jī)、主機(jī)等)的狀態(tài),衛(wèi)星站狀態(tài)仿真軟件用于仿真衛(wèi)通地球站工作狀態(tài)(即衛(wèi)星通信鏈路部分),頻譜監(jiān)視仿真軟件用于仿真頻譜監(jiān)視系統(tǒng)對(duì)衛(wèi)星轉(zhuǎn)發(fā)器載波頻譜狀態(tài)的監(jiān)視。狀態(tài)及頻譜采集模塊采集以上各仿真系統(tǒng)產(chǎn)生的鏈路和設(shè)備告警狀態(tài)、衛(wèi)星載波頻譜等仿真數(shù)據(jù),并轉(zhuǎn)換為CLIPS自定義事實(shí)輸入到CLIPS工具環(huán)境。在通信全鏈路出現(xiàn)故障時(shí),系統(tǒng)依據(jù)構(gòu)建的專家知識(shí)規(guī)則庫對(duì)輸入故障現(xiàn)象事實(shí)進(jìn)行推理分析,實(shí)時(shí)自動(dòng)判讀出故障對(duì)象、原因及應(yīng)采取的處置措施,通過人機(jī)界面通知管理人員。
通過全鏈路各部分仿真軟件,仿真通信網(wǎng)全鏈路多種不同原因引起的故障情況,以驗(yàn)證基于CLIPS的全鏈路故障自動(dòng)判讀系統(tǒng)的判讀效果。仿真的故障現(xiàn)象包括:
① 仿真地面鏈路設(shè)備的故障(路由器、交換機(jī)、主機(jī));
② 仿真衛(wèi)星地球站設(shè)備故障(功放、變頻器、調(diào)制解調(diào)器等);
③ 仿真衛(wèi)星載波頻譜異常(載波頻譜消失、頻譜干擾);
④ 仿真Eb/N0低于解調(diào)門限閾值現(xiàn)象。
實(shí)驗(yàn)結(jié)果表明基于CLIPS的通信網(wǎng)全鏈路告警故障自動(dòng)判讀系統(tǒng)對(duì)于故障機(jī)理清楚、診斷規(guī)則明確的故障具有判讀定位快、效率高的特點(diǎn),而對(duì)于故障機(jī)理模糊、診斷知識(shí)缺乏的故障則判讀困難。當(dāng)多個(gè)故障同時(shí)出現(xiàn)時(shí)診斷準(zhǔn)確性也會(huì)受到影響,故障自動(dòng)判讀專家系統(tǒng)的準(zhǔn)確程度依賴專家知識(shí)的完善性,因此需要不斷分析系統(tǒng)故障機(jī)理,改進(jìn)領(lǐng)域?qū)<抑R(shí)庫。
5 結(jié)束語
系統(tǒng)針對(duì)通信網(wǎng)全鏈路告警故障自動(dòng)判讀難題,為提高故障判讀的的智能化自動(dòng)化水平,對(duì)CLIPS專家系統(tǒng)工具在通信網(wǎng)全鏈路告警故障自動(dòng)判讀方面的應(yīng)用進(jìn)行了研究。通過分析建立了通信網(wǎng)全鏈路告警故障模型,利用CLIPS的deftemplate和defrule定義事實(shí)模板和規(guī)則,構(gòu)建了知識(shí)庫,實(shí)現(xiàn)了領(lǐng)域知識(shí)在CLIPS專家系統(tǒng)中的表示,設(shè)計(jì)實(shí)現(xiàn)了基于CLIPS的通信網(wǎng)全鏈路告警故障自動(dòng)判讀系統(tǒng)及其仿真驗(yàn)證平臺(tái)。仿真結(jié)果表明,系統(tǒng)能夠根據(jù)發(fā)生的多種故障現(xiàn)象智能、自動(dòng)、準(zhǔn)確地判讀出故障對(duì)象、原因及應(yīng)采取的處置措施,從而實(shí)現(xiàn)了通信網(wǎng)全鏈路告警故障智能自動(dòng)判讀的目的。
猜你喜歡
小獼猴智力畫刊(2022年3期)2022-03-29 01:09:42
數(shù)學(xué)小靈通(1-2年級(jí))(2021年4期)2021-06-09 06:26:14
汽車維修與保養(yǎng)(2019年7期)2020-01-06 03:30:42
幸福(2018年33期)2018-12-05 05:22:42
Coco薇(2017年11期)2018-01-03 20:59:57
暨南學(xué)報(bào)(哲學(xué)社會(huì)科學(xué)版)(2016年9期)2017-01-15 13:52:02
中國(guó)科技信息(2016年14期)2016-07-31 21:16:32
汽車維護(hù)與修理(2016年10期)2016-07-10 08:17:41
汽車維修與保養(yǎng)(2015年12期)2015-04-18 07:51:49
汽車維修與保養(yǎng)(2015年6期)2015-04-17 03:31:50
