基于完整運動約束的車載GPS/IMU組合方法
2018-08-23 03:22:24顧青濤孫書良
無線電通信技術 2018年5期
顧青濤,孫書良
(1.北京衛星導航中心,北京 100094;2.中國電子科技集團公司第五十四研究所,河北 石家莊050081)
0 引言
慣性測量單元(Inertial Measurement Unit,IMU)是自主式測量傳感器[1-2],適合應用在GPS受限且自主性要求高的組合導航領域,國外許多移動車載導航系統采用GPS/IMU組合導航,能達到較高的定位定向精度[3]。車載GPS/IMU組合導航通常采用速度和位置兩種量測方案[4-5]。車輛在正常行駛過程中,僅有前向速度,無側向和天向速度,根據此特性,可以建立車輛運行學約束方程輔助進行慣性導航,但缺少前向速度約束的運行學輔助導航是一種非完整約束的輔助導航[6]。車輛的瞬時運動可看成是以車輛中心上某點為圓心的圓周運動,可以將向心加速度引入運行學約束方程[7-8],構建完整的運動學約束方程,提高GPS/IMU組合導航系統導航定位精度。
1 引入向心加速度的車體運行約束
在車載慣導系統中選取地心坐標系i為慣性坐標系[9-10],東北天地理坐標系n為導航坐標系[11],載體坐標系為b,車輛運動坐標系為m,地球自轉角速率為ωie。車輛正常行駛情況下,如不發生側滑或跳躍等特殊情況,車輛在m系中的行駛速度除前向速度外均為零,得到輪式車輛的運動學約束方程[12-13]:
(1)
式中所示的運動學約束方程沒有前向速度信息,因而以式(1)為觀測變量的運行學輔助導航是一種非完整約束的輔助導航。慣導安裝誤差角度進行標定和補償后為小角度,經初始對準后b系與m系可看作重合,車輛打滑、滑行等原因導致IMU輸出錯誤信息時,可利用式(1)的約束方程輔助進行導航[14-15]。
車輛轉向行駛時,車輛的瞬時運動可看成是以車輛中心上某點為圓心的圓周運動(車輛直線行駛時,車輛運動也可看成是半徑無窮大的圓周運動)[16-17],圓心O位于b系的x軸上,如圖1所示。
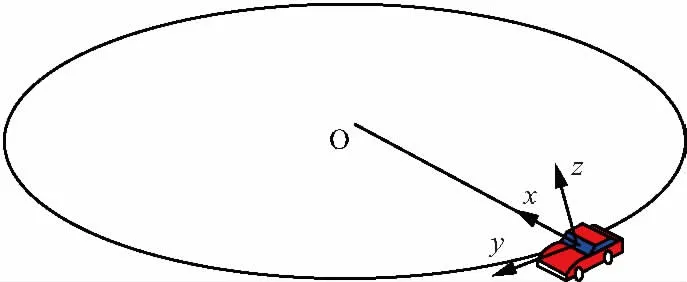
圖1 圓周運動示意圖
(2)
根據圓周運動理論得到車輛轉向產生向心加速度ar表示為:
(3)
(4)

(5)
(6)
利用式(4)和式(6)構造向心加速度差值a0:
(7)
理想情況下a0=0,但是受干擾和噪聲影響導致a0存在觀測誤差δa0:

(8)
式中,φ為姿態誤差角、為加速度計誤差、ε為陀螺誤差。
2 完整運行學約束輔助的GPS/IMU組合建模
(9)
車輛運動學約束輔助實質上是m系速度約束,考慮IMU安裝誤差和桿臂誤差,慣導解算速度在m上的分量可表示為:
(10)

將捷聯慣導速度誤差δVn、姿態誤差角φn、位置誤差δPn、加速計誤差b、陀螺誤差εb以及δa和μ擴充為捷聯慣導誤差狀態,構建完整運行學約束輔助的捷聯慣導狀態變量為:
(11)
狀態方程表示為:
(12)
其中,

觀測方程[18-19]:
ZI=HIXI+nI。
(13)
其中,
nI為噪聲矩陣、( )i表示矩陣第i行、[ ](i,j)表示矩陣第i行j列。
3 實驗結果及分析
將光纖IMU安裝輪式車輛后并進行標定。跑車場地選在學校操場跑到,采取重復跑圈,臨時方向機動等運動方式進行跑車實驗,跑車前進行10 min靜基座初始對準,連續跑車超過1.5 h,最大速度60 km/h。
如圖2所示,GPS測速和捷聯慣導解算速度,可以看出在2 300~2 320 s時間段內里GPS輸出明顯增大而捷聯慣導輸出為0,這是車輛滑動引起的GPS錯誤輸出,在2 620~2 625 s時間段內GPS輸出為0,而慣性有輸出,這是由于車輛下坡滑行引起的GPS錯誤輸出,在GPS測速錯誤情況下,需采用運動學約束輔助慣性導航。
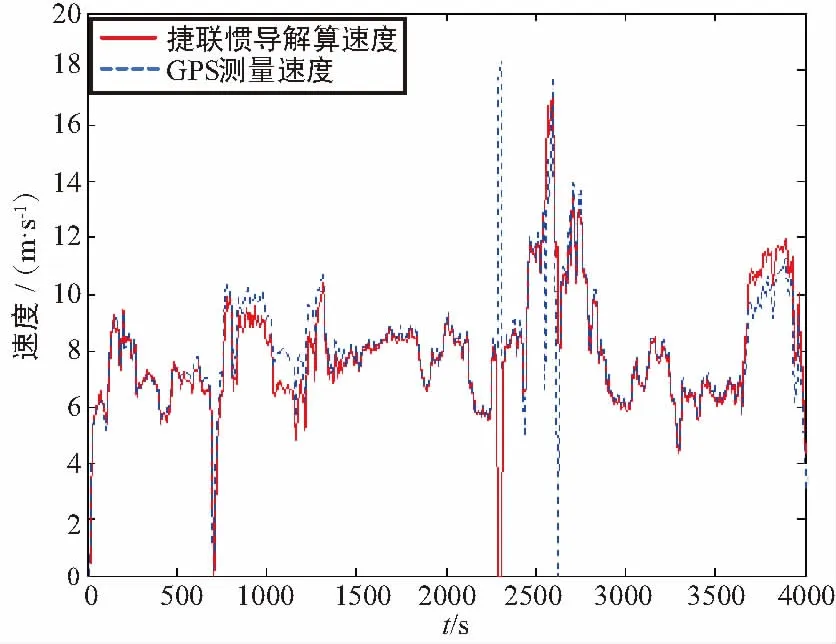
圖2 捷聯慣導和GPS量測速度
為驗證向心加速度誤差作為觀測量的運動學約束方程有效性,取500 s數據進行分析。如圖3所示,可看出車輛轉向產生向心加速度ar、向心加速度差值ao的觀測值受干擾影響較大。對觀測數據進行平滑處理,分別得到0.05 s和0.2 s的平滑結果,如圖4與圖5所示,可看出平滑后的車輛轉向產生向心加速度ar和IMU獲取的向心加速度觀測值基本相同,說明采用向心加速度觀測誤差作為觀測量,進行輪式車輛運動學約束輔助慣性導航是可行的。
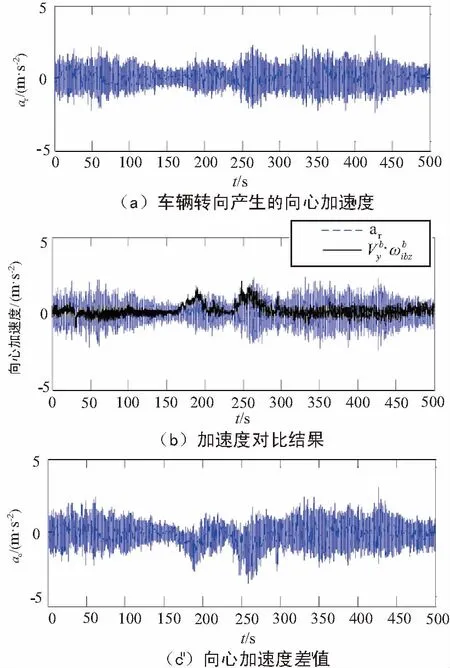
圖3 向心加速度觀測值
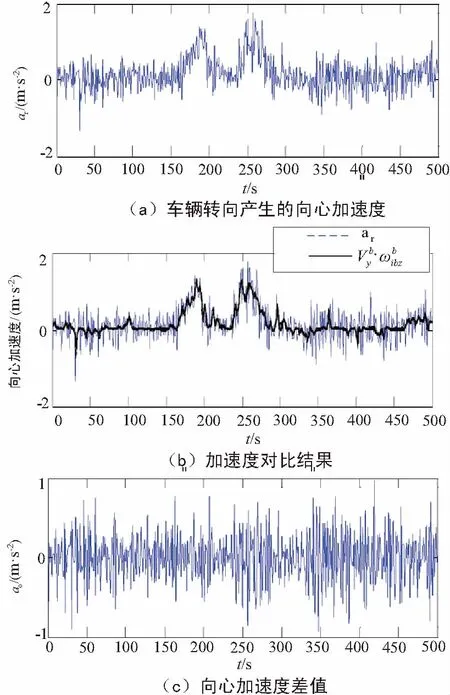
圖4 0.05 s平滑的向心加速度觀測值
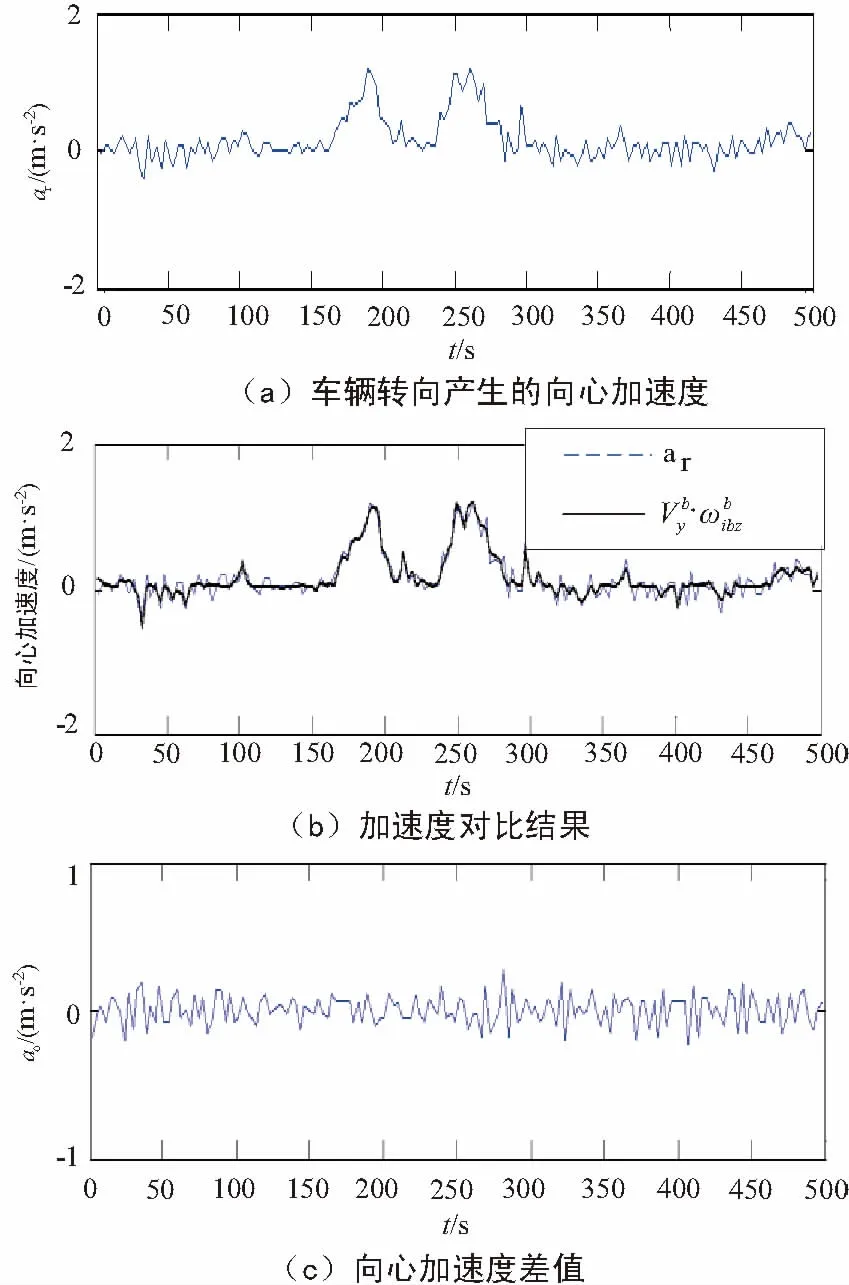
圖5 0.2 s平滑后的向心加速度觀測值
為進一步驗證約束方案的有效性與優勢,分別開展進行無約束和引入向心加速度觀測誤差的完整運動學約束條件下的跑車實驗,定位結果如圖6所示。
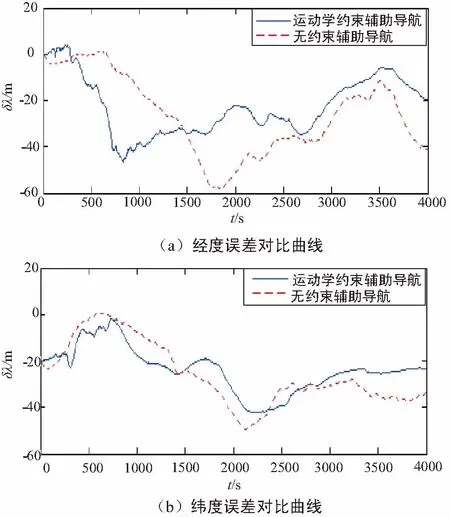
圖6 水平定位誤差
可以看出由于受GPS測速誤差影響,無約束組合導航的經度定位誤差約60 m,緯度定位誤差約35 m;采用完整運動學約束的組合導航經度定位誤差約40 m,緯度定位誤差約20 m。采用完整運動學約束的組合導航精度明顯優于無約束組合導航。
4 結束語
圍繞車輛運動過程中由于側滑等原因導致車載組合導航系統中的GPS獲取速度存在誤差,進而影響組合精度的問題,提出了一種運動狀態約束條件下的組合方法,把向心加速度引入運行學約束方程,開展完整運行學約束輔助的GPS/IMU組合建模并建立測試環境。分別采用0.05 s和0.2 s對觀測數據進行平滑處理后,車輛轉向產生向心加速度和IMU獲取的向心加速度觀測值基本相同,驗證了輪式車輛運動學約束輔助慣性導航的可行性;為進一步驗證約束方案有效性與優勢,開展無約束和引入向心加速度觀測誤差的完整運動學約束條件下的跑車實驗,采用完整運動學約束的組合導航經度定位誤差約40 m、緯度定位誤差約20 m,明顯優于無約束組合導航的經度誤差60 m、緯度誤差35 m的定位結果。該研究成果可為后續開展車載導航系統研發提供技術參考。
