基于稀疏光流的道路航拍圖像拼接算法?
2018-08-28 02:50:10張楚東陸建峰
艦船電子工程 2018年8期
關(guān)鍵詞:特征
張楚東 陸建峰
(南京理工大學(xué)計算機(jī)科學(xué)與工程學(xué)院 南京 210094)
1 引言
無人機(jī)航拍圖像具有大視角、低形變、景深變化小的特點,特別適合獲取平面上帶狀區(qū)域的信息采集。因此,在道路檢測[1]、交通事故勘察[2]、道路基礎(chǔ)設(shè)施維護(hù)[3]等問題上人們逐步開始使用無人機(jī)采集道路圖像,獲取更加高質(zhì)量的原始數(shù)據(jù)。然而,單幅圖像的視野十分有限。為了在保證圖像高分辨率的同時,提高圖像覆蓋的范圍,我們需要對多幀圖像進(jìn)行拼接。
圖像拼接算法主要可分為圖像配準(zhǔn)、變換模型計算、圖像融合三個步驟。尋找兩幅具有重疊區(qū)域的圖像之間的匹配關(guān)系,這一過程稱為圖像配準(zhǔn)。得到圖像的匹配關(guān)系后,使用變換模型從數(shù)學(xué)上對這一關(guān)系進(jìn)行描述。常用的變換模型為單應(yīng)變換,兩幅圖像重疊區(qū)域上的像素點關(guān)于單應(yīng)矩陣一一對應(yīng)。最后,將兩張圖像對應(yīng)到同一坐標(biāo)系下,完成圖像融合。
作為整個算法的前端,圖像配準(zhǔn)與應(yīng)用場景息息相關(guān)。當(dāng)前的主流拼接算法使用特征點完成兩幅圖像的配準(zhǔn)。其基本流程為分別從兩幅圖像中提取特征點與描述子,利用描述子計算特征點間的匹配關(guān)系,以此作為圖像的匹配關(guān)系。然而,在道路航拍圖像中,道路區(qū)域的紋理特征稀少,局部相似性高,從而使得特征法容易失效。針對這一問題,本文利用圖像序列的連續(xù)性,依靠光流法跟蹤特征以實現(xiàn)匹配。
另一方面,長序列圖像拼接中,誤差的累積會大大降低圖像融合的質(zhì)量,使得全景圖像中出現(xiàn)鬼影、模糊等不一致現(xiàn)象。現(xiàn)有的方法中使用基于關(guān)鍵幀的光束平差法[4]、全局注冊[5]、回環(huán)檢測[6]等手段解決這一問題。本文采用全局注冊與二次配準(zhǔn)的思路,首先逐幀計算相鄰關(guān)鍵幀的變換模型,接著利用單應(yīng)變換的傳遞性,將所有圖像映射到全局基準(zhǔn)圖中完成融合。為了降低累積誤差,在融合前二次計算待新圖像與基準(zhǔn)圖的變換關(guān)系,提高精度。最后,將全局基準(zhǔn)圖作為全景圖像輸出。
2 系統(tǒng)設(shè)計概述
如圖1所示,為了提高運(yùn)行效率,圖像序列拼接算法分為并行執(zhí)行的兩個線程,跟蹤線程與拼圖線程。我們按照一定的準(zhǔn)則把所有圖像分為關(guān)鍵幀圖像與非關(guān)鍵幀圖像,跟蹤線程在關(guān)鍵幀中分網(wǎng)格提取分布均勻的特征集合S。對于后續(xù)到來的每一幀圖像,利用光流法逐幀跟蹤S在各自圖像中對應(yīng)的特征點位置。同時,根據(jù)新圖像中跟蹤到的特征點的分布決定是否將其作為新的關(guān)鍵幀。
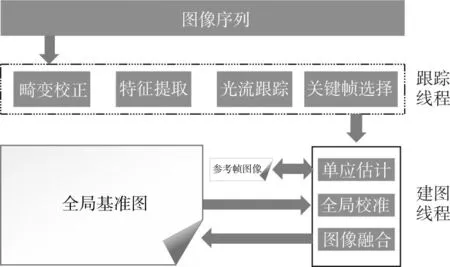
圖1 圖像拼接系統(tǒng)框架圖
拼圖線程負(fù)責(zé)將關(guān)鍵幀拼接到全局基準(zhǔn)圖上。它從跟蹤線程獲得關(guān)鍵幀序列和相鄰關(guān)鍵幀之間的匹配特征點對。根據(jù)兩幀的匹配點對,恢復(fù)兩個關(guān)鍵幀之間的單應(yīng)矩陣H,以此作為當(dāng)前關(guān)鍵幀在全局地圖中的粗略位置。最后根據(jù)低精度的H將當(dāng)前關(guān)鍵幀映射到全局地圖上,再次利用光流法將當(dāng)前幀與全局地圖進(jìn)行配準(zhǔn),糾正跟蹤過程與位姿變換過程中累積的誤差。當(dāng)該關(guān)鍵幀包含足夠的未探索區(qū)域時,將關(guān)鍵幀圖像與全局地圖進(jìn)行融合。
我們將在下文中介紹兩個線程中重要模塊的具體實現(xiàn)。
3 跟蹤線程
3.1 特征提取
無人機(jī)低空航拍的圖像中,即使路面占了圖像的主要區(qū)域,但是就特征點的顯著性而言,綠化帶、馬路牙子等路面外的區(qū)域擁有更強(qiáng)、更豐富的特征點。圖2為四種當(dāng)前流行的實時特征檢測算法的效果,按順序分別對應(yīng)Shi-Tomasi[7]、Harris[8]、ORB[9]、FAST[10]。
我們希望馬路上能有足夠多的特征點,從而使路面所在平面在單應(yīng)矩陣的RANSAC估計中獲勝,因此采用了分網(wǎng)格提取特征點的方法。將整幅圖像劃分為許多同等大小的網(wǎng)格,每個網(wǎng)格中只保留一個最佳的特征點。同時,出于速度的考慮,我們選擇了以速度快聞名的FAST角點作為候選特征點。同時,為了保證特征點具有良好的可跟蹤性,對于每一個候選特征點,計算其Shi-Tomasi得分。接著,根據(jù)像素坐標(biāo)將特征點映射到對應(yīng)的網(wǎng)格中,每個網(wǎng)格取Shi-Tomasi得分最高的點作為網(wǎng)格特征點。具體算法流程如下:
1)提取FAST角點。
3)計算每個角點的Shi-Tomasi響應(yīng)值。
4)每個網(wǎng)格選響應(yīng)值最高的點作為本網(wǎng)格的特征點,同時保留Shi-Tomasi得分計算過程中的M矩陣。
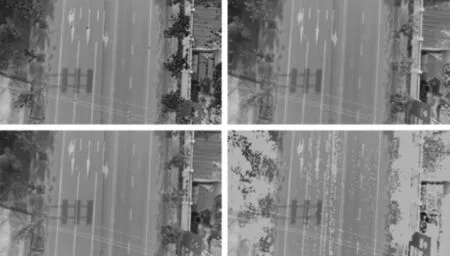
圖2 四種現(xiàn)有特征檢測算法的效果
在特征提取步驟,我們不對特征的好壞進(jìn)行評估,也不區(qū)分特征點是否屬于道路區(qū)域。我們將通過后續(xù)嚴(yán)格的光流跟蹤交叉驗證和隨機(jī)采樣一致性(RANSAC)完成特征的篩選,而特征提取步驟只需要保證足夠豐富且有效的特征點即可。
3.2 稀疏光流跟蹤
近年來,在圖像拼接領(lǐng)域,特征法由于其對光照、尺度、視角具有良好的不變性而成為圖像拼接的主流方法。然而,這也意味著特征法對圖像內(nèi)容具有更高的要求,以便能夠從中提出良好的特征點。通過基于ORB的特征匹配實驗我們發(fā)現(xiàn),在道路航拍圖像中,特征點容易出現(xiàn)在道線,特別是白色虛線的各個角落點,數(shù)量十分稀少;其次,路面紋理的重復(fù)性使得單純依靠特征點局部信息的描述子進(jìn)行的特征匹配容易出現(xiàn)誤匹配現(xiàn)象,如圖3所示。
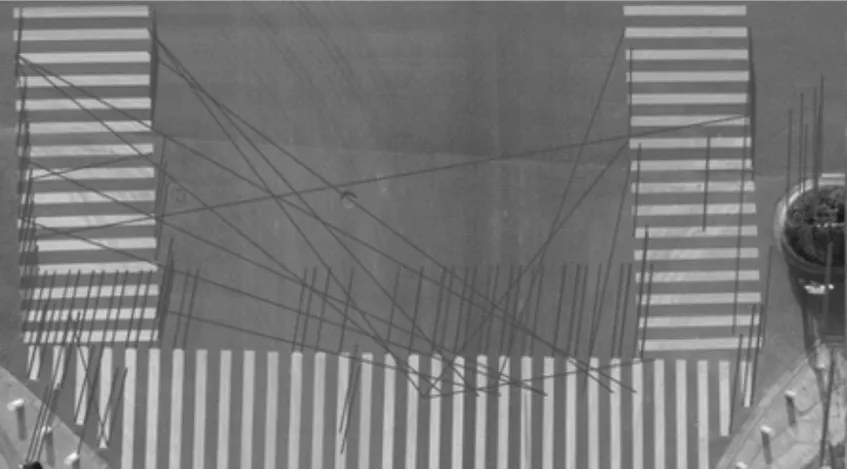
圖3 ORB特征匹配的光流向量圖
視頻序列中,相鄰圖像之間的變化量很小,且光照在這短暫的時間里可視為不會發(fā)生變化。因此,在有序的、高幀率下的視頻序列可以利用光流法[11]完成特征匹配。其次,我們只對所提取的特征點做光流跟蹤,相比于稠密光流,時間復(fù)雜度將會大大降低。
對于每一幀新到來的圖像,我們利用光流尋找上一幀的特征點在當(dāng)前幀的位置。為了提高光流跟蹤的準(zhǔn)確性,我們將再次使用光流計算所跟蹤到的當(dāng)前幀的特征點在上一幀中的位置。如果經(jīng)過兩次光流映射回上一幀的特征點與原始特征點的誤差夠小(在我們的實驗中,閾值為1個像素),則表示光流跟蹤是成功的,并將這些成功跟蹤的特征點作為當(dāng)前幀的特征點。由于光流法可以得到相鄰兩幀之前的特征對應(yīng)關(guān)系,因此我們可以逐幀回溯,得到當(dāng)前幀與最近的歷史關(guān)鍵幀中提取的特征點之間的匹配關(guān)系。利用這些匹配的特征點對,可以完成每一幀圖像相對于與其最近的歷史關(guān)鍵幀之間的單應(yīng)矩陣。
傳統(tǒng)的LK光流的復(fù)雜度很高,在迭代求解的每一步都需要重新計算雅各比矩陣。為了加速這一過程,我們采用了Inverse Composition形式的LK光流[12]。對于參考幀J中的像素點(u,v),我們需要在當(dāng)前幀I中尋找像素點(x,y)使得

在用高斯-牛頓法求解該問題時,在每一步的迭代過程中,我們將增量(δx,δy)增加到參考幀中,即


重復(fù)迭代直到滿足收斂準(zhǔn)則。
Inverse Composition形式的求解與傳統(tǒng)高斯牛頓法的區(qū)別在于:
1)計算增量時的模型不同。
2)狀態(tài)更新方程不同。
從式(2)中我們可以看到,由于(u,v)的值是固定的,因此我們只需要求解一次雅各比矩陣即可——甚至這一次計算都可以省略,因為對于參考幀中每個特征點(u,v),我們在特征提取時計算Shi-Tomasi得分時已經(jīng)獲得對應(yīng)的M矩陣。這一M矩陣與光流法的Hessian矩陣是相同的,因此可以直接保存并使用特征提取時計算得到的M矩陣。
3.3 關(guān)鍵幀選擇
與非關(guān)鍵幀不同,關(guān)鍵幀作為位姿估計的單位,不僅需要光流跟蹤,還需要計算關(guān)鍵幀到全局基準(zhǔn)圖的坐標(biāo)變換矩陣,即單應(yīng)矩陣。在基于關(guān)鍵幀的圖像拼接中,非關(guān)鍵幀相對于關(guān)鍵幀的位置是固定的,而關(guān)鍵幀本身可以視作圖像序列中的活動節(jié)點,作為優(yōu)化變量最小化拼接過程中累積的誤差。因此,被選為關(guān)鍵幀的圖像需要滿足以下3個基本要求:
1)圖像中跟蹤到的特征點足夠多,從而較為準(zhǔn)確地計算出當(dāng)前幀圖像相對于上一關(guān)鍵幀圖像的單應(yīng)矩陣。
2)跟蹤成功的特征點均勻地分布在圖像中各個部位。如果特征點分布過于集中,容易出現(xiàn)過擬合的現(xiàn)象,無法完整擬合整個區(qū)域。
3)新的關(guān)鍵幀包含盡可能多的未探索區(qū)域,給拼圖線程提供足夠的新信息。
基于上述原因,我們采用如下關(guān)鍵幀選擇策略如下:
1)查看跟蹤的特征點數(shù)是否小于n,若是,則需要關(guān)鍵幀;
3)若需要關(guān)鍵幀,將上一幀圖像作為新的關(guān)鍵幀,從中提取特征點,并將該幀傳遞給拼圖線程;
4)以新的關(guān)鍵幀為參考幀,重新處理當(dāng)前幀,即基于新的參考幀重復(fù)上述光流跟蹤、關(guān)鍵幀選擇的過程。
4 拼圖線程
在絕大多數(shù)圖像拼接的算法中,不同圖像之間公共區(qū)域的拼接模型都采用了單應(yīng)矩陣。單應(yīng)矩陣包含了圖像之間坐標(biāo)變換的所有信息。在拼圖線程中,我們也采用單應(yīng)矩陣作為重疊區(qū)域的拼接模型,分別完成關(guān)鍵幀之間的配準(zhǔn)、關(guān)鍵幀到全局基準(zhǔn)圖的配準(zhǔn)等。
4.1 幀間單應(yīng)矩陣估計
經(jīng)過跟蹤線程的處理與篩選,我們可以到數(shù)量大大減少但依然包含了整個場景信息的關(guān)鍵幀序列,且相鄰兩幀關(guān)鍵幀之間的特征匹配關(guān)系已經(jīng)找到。我們在基于隨機(jī)采樣一致性的框架下,計算相鄰兩幀關(guān)鍵幀之間的單應(yīng)變換,其輸入為匹配好的特征點對。
記參考幀(即上一關(guān)鍵幀)為Ki,其中的特征點集合新的關(guān)鍵幀為K,跟i+1蹤到的特征點集合其中 Pi與Pi+1根據(jù)上標(biāo)一一對應(yīng)。對于任意一對特征點匹配對 pi與 pi+1,我們有

其中,Hi+1,i是一個3×3的矩陣,我們將其中的9個元素設(shè)為未知數(shù),同時將該矩陣?yán)瓰橐粋€列向量可以得到以下線性系統(tǒng):
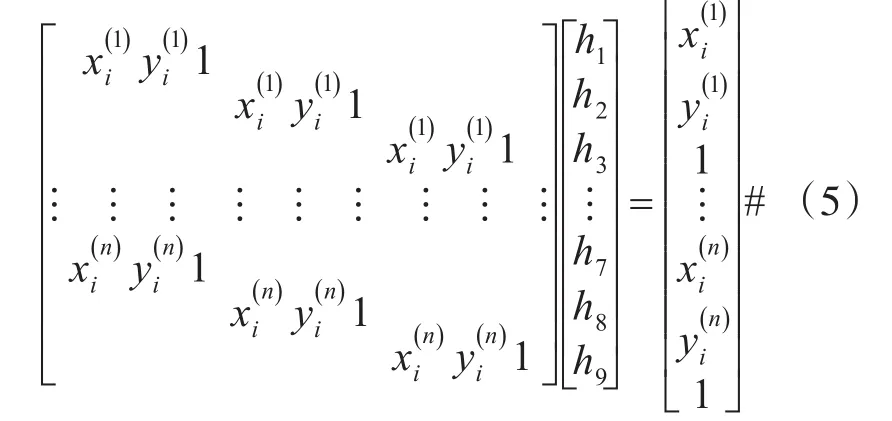
接著,使用normal equation可以得到最小二乘意義下的最優(yōu)h列向量,即單應(yīng)矩陣Hi+1,i。此時,我們便得到了關(guān)鍵幀序列中相鄰兩幀的變換關(guān)系。
4.2 全局單應(yīng)矩陣校準(zhǔn)
單應(yīng)矩陣具有傳遞性,即

根據(jù)這一性質(zhì),我們可以根據(jù)相鄰幀的單應(yīng)變換關(guān)系得到序列中任意兩個關(guān)鍵幀的單應(yīng)矩陣。在我們的實現(xiàn)中,將第一幀關(guān)鍵幀作為全局基準(zhǔn),從 而 當(dāng) H0,i-1已 知 時 ,H0,i=H0,i·Hi-1,i。 其 中Hi-1,i為4.1節(jié)中估計得到的幀間單應(yīng)矩陣。
然而,在多幀拼接中,由于誤差隨著拼接過程不斷累積,單純依靠幀間的估計結(jié)果以及單應(yīng)矩陣的傳遞性而獲得的全局單應(yīng)矩陣H0,i無法將當(dāng)前關(guān)鍵幀Ki準(zhǔn)確地拼接到全局基準(zhǔn)圖中,從而產(chǎn)生鬼影現(xiàn)象,如圖4所示。誤差累計的特點是多圖大范圍拼接與兩張或少數(shù)圖像拼接之間的重要差別之一。

圖4 因拼接誤差造成的殘影

校準(zhǔn)算法如下:
1)根據(jù)H0,i計算Ki在全局中的對應(yīng)圖像區(qū)域
3)在Ki中提取特征點 pi,跟蹤這些特征點在Iroi中的位置 pr。
在實現(xiàn)中,由于我們記錄的是前一關(guān)鍵幀在全局基準(zhǔn)圖中的校正后的位置,即當(dāng)前幀為Ki時,我們已知糾正后的位姿H0,i-1與未糾正的幀間單應(yīng)矩陣H'i-1,i,最后可以得到糾正后的幀間位姿轉(zhuǎn)移
風(fēng)俗油畫以現(xiàn)實的生活場景以及日常情感為主題,其故事性為人們了解不同時期、地域、文明、種族的歷史提供了一個橋梁,將那些模糊的世界寫實而又豐富地展現(xiàn)到人們面前。

4.3 圖像融合
在圖像拼接中,很難定量地衡量拼接結(jié)果的好壞。因此在實驗中,為了能更明顯地展現(xiàn)拼接結(jié)果的優(yōu)劣性,均衡考慮效率,我們采用了加權(quán)的方式融合重疊區(qū)域,即
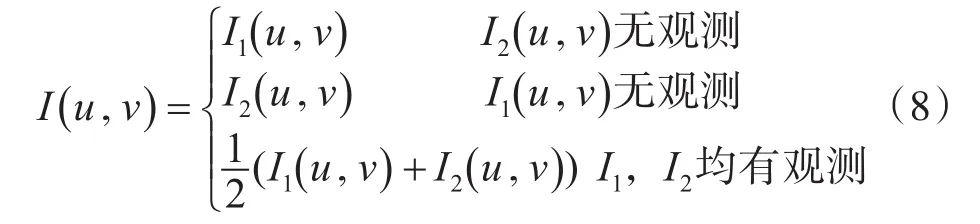
這樣,當(dāng)融合后的圖像出現(xiàn)較為明顯的鬼影時,說明拼接的準(zhǔn)確性較低,如圖4所示。
5 實驗及分析
為了驗證我們的圖像拼接算法的有效性,我們分別在無人機(jī)直線飛行、原地旋轉(zhuǎn)以及路口這三種典型場景下進(jìn)行拼接實驗,并將相同的數(shù)據(jù)與商用全景拼接軟件PTGui進(jìn)行對比。PTGui版本號9.19。所有圖像數(shù)據(jù)均來自禪思X3-FC350相機(jī),圖像分辨率3840*2160,幀率為30fps。
實驗平臺為Windows 10,CPU Intel i7-5500U 2.4GHz,8G內(nèi)存。所有代碼均用python 2.7語言實現(xiàn)。
在三組實驗中,我們均先將原始的視頻流數(shù)據(jù)作為本文提出的拼接算法的輸入,將最終參與拼接的關(guān)鍵幀挑選出來PTGui的輸入。所有關(guān)鍵幀之間均具有合適(且足夠)的重疊區(qū)域。
評價標(biāo)準(zhǔn):如前文所述,本文的方法對重疊區(qū)域采用等值加權(quán)融合的方法。因此,拼接效果的好壞將會體現(xiàn)在鬼影上的嚴(yán)重程度上。
5.1 路口場景
路口場景來自387張連續(xù)視頻圖像,其中參與拼接的關(guān)鍵幀共9張。
PTGui的操作過程分為對準(zhǔn)圖像與拼接全景圖兩個部分,其中圖像對準(zhǔn)耗時約8s,全景圖拼接耗時約18s,拼接后的圖像分辨率為4178*4199。效果如圖5(a)所示。可以看到,在下方的斑馬線處出現(xiàn)了明顯的扭曲與鬼影,以及左側(cè)的斑馬線處也發(fā)生了輕微的變形。
本文的拼接算法運(yùn)行結(jié)果如圖5(b)所示,全圖分辨率為4112*4224。其中特征檢測總耗時3.37s,平均耗時0.37s/幀;圖像拼接與校正總耗時3.76s,平均耗時0.41s/幀;光流跟蹤總耗時31.45s,平均耗時0.08s/幀。
可以看到,圖像中路面部分,尤其是道線邊緣清晰,無圖5(a)中的扭曲與模糊。這說明拼接的誤差足夠小。值得一提的是,動態(tài)物體在式(8)的融合策略下,會出現(xiàn)鬼影(我們利用這一特點直觀地評價算法的好壞)。如果僅是為了消除鬼影,我們可以單一式融合準(zhǔn)則,即對重疊區(qū)域只選擇某一圖像(這也是PTGui中的做法),然而這一策略并不能過濾動態(tài)物體。
5.2 直線飛行
路口場景來自532張連續(xù)視頻圖像,其中參與拼接的關(guān)鍵幀共16張。
PTGui的拼接效果如圖6(a)所示,圖像配準(zhǔn)時間約為20s,全景圖生成耗時30s。圖像分辨率4677*5613。可以看到,圖像中有明顯的扭曲,在下半部分的直線發(fā)生了錯位,且道路的走向往右傾斜。
本文的拼接算法運(yùn)行結(jié)果如圖6(b)所示,全圖分辨率為4438*5789。其中特征檢測總耗時8.67s,平均耗時0.54s/幀;圖像拼接與校正總耗時15.84s,平均耗時0.99s/幀;光流跟蹤總耗時44.54s,平均耗時0.13s/幀。
從圖6(c)、(d)的局部對比圖可以看到,我們的方法對于直線的恢復(fù)效果優(yōu)于PTGui的拼接效果。

圖6 直飛場景的拼接
5.3 原地旋轉(zhuǎn)
旋轉(zhuǎn)場景來自751張連續(xù)視頻圖像,其中參與拼接的關(guān)鍵幀共25張。
PTGui圖像對準(zhǔn)耗時約43s,全景圖拼接耗時約63s,拼接后的圖像分辨率為5177*5230。效果如圖7(a)所示。對于純旋轉(zhuǎn)的場景,PTGui無法完成拼接,整張圖像呈現(xiàn)破碎的效果。
本文的拼接算法運(yùn)行結(jié)果如圖7(b)所示,全圖分辨率為4927*4812。其中特征檢測總耗時11.15s,平均耗時0.45s/幀;圖像拼接與校正總耗時27.91s,平均耗時1.12s/幀;光流跟蹤總耗時65.34秒,平均耗時0.09s/幀。相比于PTGui的拼接結(jié)果,我們的方法完整地恢復(fù)了旋轉(zhuǎn)場景下的道路圖像。
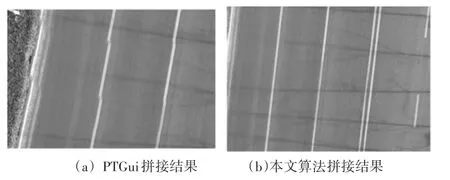
圖7 旋轉(zhuǎn)場景拼接結(jié)果
三組實驗的拼接時間對比如表1所示。
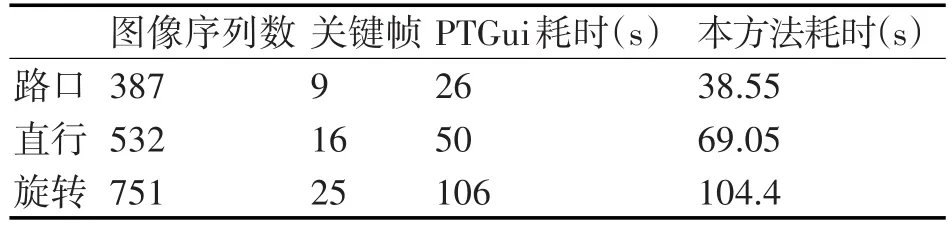
表1 各個場景下拼接時間的比較
5.4 大場景拼接
最后,我們采用上述算法對一段長達(dá)5min的路口航拍視頻進(jìn)行路口重建,如圖8所示。圖像分辨率為19117×18916,其表示范圍是單幀圖像的45倍,地表分辨率約為1cm每像素。
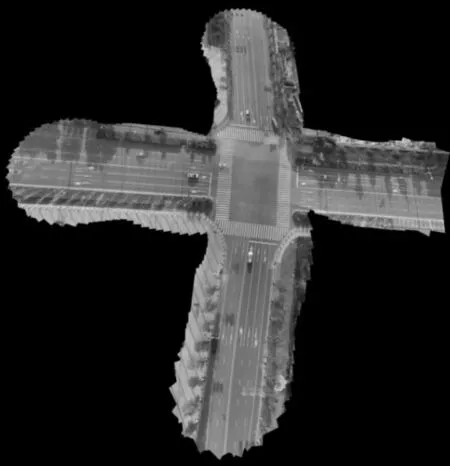
圖8 大場景拼接效果圖
6 結(jié)語
根據(jù)與PTGui的對比,以及最后長視頻序列的結(jié)果可知,本文的算法拼接無人機(jī)航拍的道路圖像序列時效果更佳,能完成紋理稀疏和局部相似度高場景下的圖像拼接。然而,由于圖像的高分辨率,算法無法做到實時拼接,時間效率有待進(jìn)一步提高。
猜你喜歡
數(shù)學(xué)小靈通·3-4年級(2024年2期)2024-05-15 02:02:28
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2022年3期)2022-04-26 14:04:16
數(shù)學(xué)年刊A輯(中文版)(2020年1期)2020-05-19 00:30:36
空間科學(xué)學(xué)報(2020年2期)2020-04-01 03:50:40
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
中等數(shù)學(xué)(2019年8期)2019-11-25 01:38:14
當(dāng)代陜西(2019年10期)2019-06-03 10:12:04
新聞傳播(2018年11期)2018-08-29 08:15:24
數(shù)學(xué)小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
廣西科技大學(xué)學(xué)報(2016年1期)2016-06-22 13:10:38