北斗定位特種車輛實時油耗檢測算法研究
2018-08-29 06:44:52馬國良張鵬煒黃振華王文軍舒偉勇
自動化與儀表 2018年8期
馬國良,張鵬煒,黃振華,王文軍,舒偉勇
(解放軍32139部隊,北京 101200)
目前,大多數機動車上油量表采用三刻度式儀表或八段數碼管顯示剩余油量所占油箱體積的比例[1-2]。該類儀表只能使駕駛者定性地了解燃油使用狀況和剩余燃油數量,缺乏精確性;使用時還可能出現油量測量系統零部件卡死的現象,給駕駛員帶來行車不便,成為安全駕駛的常見隱患之一[3-4]。同時,浮子式油量測量裝置在經過陡峭路面時,由于車身振動,油量指針也隨之振動,會造成油量顯示不準確[5]。特別是對于軍用特種車輛而言,由于所附帶油箱數量多,且均為不規則形狀,所用的油量檢測裝置還會因車輛停放地面的傾斜度、行使狀態的顛簸程度而產生較大誤差,從而影響裝備的使用效率,甚至會貽誤戰機。
對此,為確保駕駛員對車輛用油情況的準確感知,方便保障機關對運行車輛進行實時、準確、全面的動態位置遠程監控,在不破損現有裝備的前提下,采用超聲傳感、單片機控制、北斗定位與無線通信等技術[6-9],實現對車輛的油量實時檢測與定位。由于軍用車輛的定位裝置采用北斗模塊[10],測量到的位置數據不同于民用車輛裝配的GPS,故在計算油耗時需要做一定的變換運算。文中從北斗定位儀測得的角度數據入手,建立球面坐標系,以地球半徑的長度數據作為中間量,將其轉換為兩點間距離,然后根據油耗的通常定義計算出燃油消耗量,實現對執行任務車輛的油耗進行實時檢測與監控。
1 北斗定位特種車輛實時油量檢測系統
特種車輛實時檢測與監控系統主要由車載終端油量檢測裝置和遠程監控中心兩大部分組成,系統結構如圖1所示。

圖1 特種車輛實時檢測與監控系統構成Fig.1 Structure of real-time detection and monitoring system for special vehicles
該系統的設計思路是在不破壞現有裝備結構的情況下,將超聲傳感器粘貼在油箱底部,從而達到較精確檢測該油箱油量的目的。然后,將所檢測的油量數據和北斗的定位數據,經單片機計算與控制后,實時顯示在駕駛室內。同時利用無線通信技術(如GPRS)[11],將數據傳輸且保存在互聯網服務器中,保障機關人員通過PC、平板和手機客戶端實現對車輛運行狀態實時、準確、全面的動態監控[12]。
2 油耗概念及數學模型
2.1 油耗定義
油耗是指機動車行駛100 km所消耗的燃油量,計量單位為L。機動車的經濟性指標是耗油量,為機動車使用性能中重要的參數之一。在我國,油耗指標由汽車制造廠根據國家規定的試驗標準,通過樣車測試得出。該指標包括等速油耗和道路循環油耗。
等速油耗,是指機動車在良好的路面上作等速行駛時的燃油經濟性指標[13]。由于等速行駛是機動車在公路上運行的一種基本工況,等速油耗容易測定,因此得到廣泛采用。如,法國和德國將90 km/h和120 km/h的等速油耗作為燃油經濟性的主要評價指標,我國也采用這一指標。國產汽車說明書中標明的百公里油耗,一般都是等速油耗。
道路循環油耗,是指汽車在道路上按照規定的車速和時間規范做反復循環行駛時所測定的燃油經濟性指標,又稱多工況道路循環油耗[13]。在車速和時間規范中,規定每個循環包含各種行駛的工況,并規定每個循環中的換擋時刻、制動與停車時間,以及行駛速度、加速度及制動減速度的數值。因此,用這種方法測定的燃油經濟性,比較接近汽車實際的行駛情況。美國汽車工程師學會(SAE)制定了SAEJ10926道路循環試驗規范[14],被廣泛采用。
由上述油耗定義及分類可知,通常的油耗概念均為汽車制造商按照規定的試驗標準測試而來,目前國內外機動車尚未發現有專門測試油耗裝置[15]。
2.2 基于北斗定位測距的數學模型
目前北斗定位設備所提供的位置信息均為弧度值[16-17],因此車輛在任意 2 點(α1,β1)與(α2,β2)之間的距離ΔL在球面坐標系下可表示為

其中,

式中:R為地球平均半徑。
當α和β采用角度時,式(1)變為
將R=6371004 m,π=3.1415926 代入式(2),得

假設,車輛在 2 點(α1,β1)與(αn,βn)之間的耗油量為 ΔQ=Qn-Q1,行駛的總里程 ΔL=∑ΔLi,則百公里耗油量(10-2L/km)即油耗為

3 油耗檢測算法
由油耗的數學模型可歸納出以下計算步驟:
步驟1由連續2次讀取的北斗定位儀的位置坐標(α1, β1)和(α2, β2),由此計算 Δα=α2-α1,Δ β=β2-β1。
步驟2將Δα,Δβ代入ΔL計算公式(2),得出地面上2點的(弧線)距離ΔL。
步驟3累加多次ΔL計算結果,得到一定時間段內 (如30 s或2 min等)車輛行駛的里程ΔL=∑ΔLi及消耗的油量ΔQ。
步驟4將ΔQ和ΔL代入式(4),計算得到百公里耗油量,即設定時間段內的油耗。
檢測算法軟件程序流程如圖2所示。
4 試驗及結果分析
基于以上系統設計原理及算法,開發了北斗定位油耗實時檢測儀(如圖3所示),并安裝在常用車輛上,進行試驗數據采集。
駕駛員駕駛廠家標稱油耗為18 L(百公里油耗)的特種車輛,在城市周邊不同路況連續行駛2 h,每隔10 min采集1次油耗測量值,采集結果見表1。
為驗證樣機檢測的可靠性,在4種不同路況下,將測得的油耗平均值乘以實際行駛里程,將計算的耗油量與實際消耗的油量相比較,得到誤差率,即

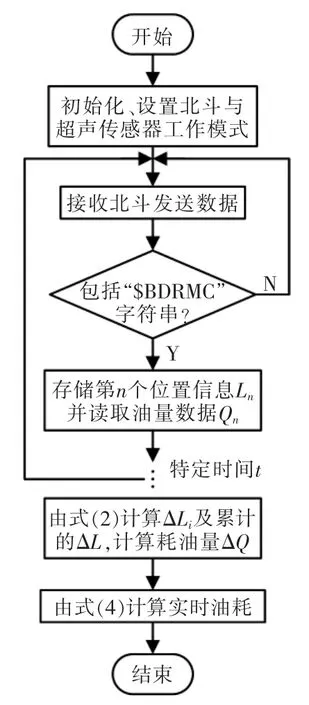
圖2 油耗檢測算法程序流程Fig.2 Flow chart of fuel consumption detection algorithm

圖3 北斗定位油耗實時檢測儀樣機Fig.3 Real-time fuel measurement prototype with BDS positioning
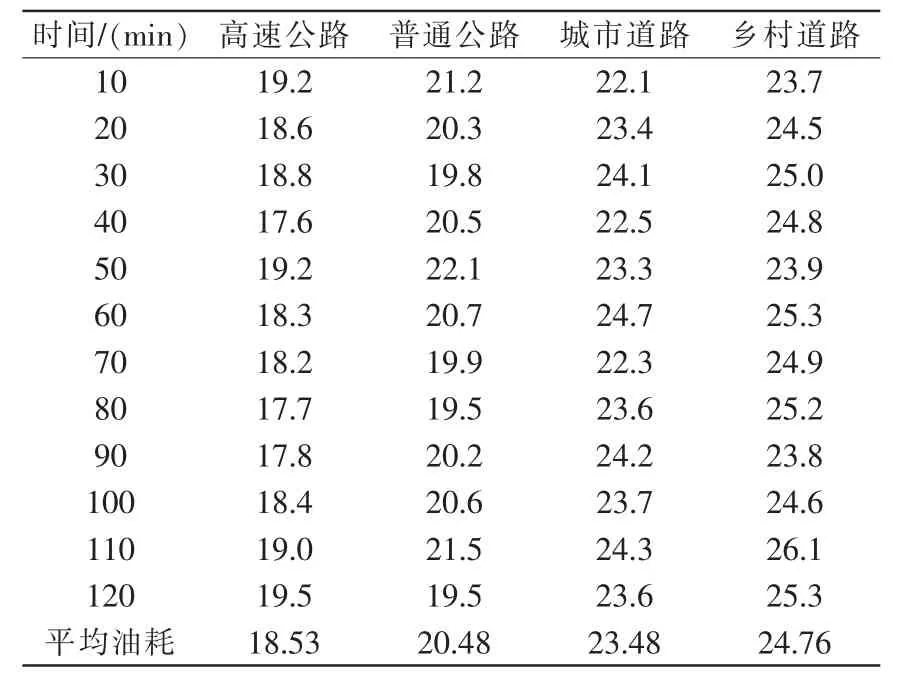
表1 不同路況油耗測量值 (10-2L/km)Tab.1 Fuel consumption measured value in different road conditions (10-2L/km)
誤差率見表2。
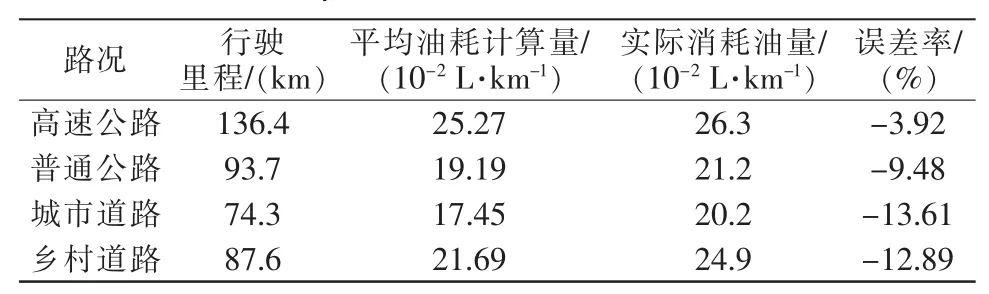
表2 測量耗油量相對于實際值的誤差率Tab.2 Error rate of measuring fuel consumption relative to actual value
試驗數據的分析結果如下:
1)在路況較好的高速公路上行駛時,測得的油耗數據相對穩定,與廠家標稱油耗值相近,且均值略大于廠家標稱值。從油耗誤差率來看,由測量值計算的油量略小于實際耗油量,但誤差率最小。究其原因,廠家標稱的油耗通常是在良好路面上測量的等速油耗,在高速上行駛從整個行程來看最接近于等速,因為受收費站及少數路段車輛擁擠等路況的影響會降低車速,頻繁地降速、增速就會增大油量消耗。因此,測量值接近且大于廠家標稱值,測得油耗計算值小于實際消耗油量符合理論基礎。
2)在普通公路和城市道路行駛時,路面質地較好,但路面狹窄,人車密集,會導致車輛行駛緩慢,特別是在城市道路行駛,還受到交通信號燈的約束,更增加了剎車-起步的頻率,所以測得的平均油耗大于廠家標稱值。另外,由測量平均油耗計算得到的耗油量也小于實際消耗油量,且誤差相對較大。
3)在鄉村道路行駛時,路面質地較差,會產生較大的摩擦力,因此測得平均油耗數據與廠家標稱值相差最大。但是因人、車密度小,避免了因頻繁剎車-起步所損耗的油量,所以雖然由平均油耗計算得到的油量也小于實際耗油量,但是誤差率相對于城市道路減小了。
5 結語
為提高特種車輛油量檢測的實時性和準確性,采用超聲傳感、北斗定位和無線通信等技術,通過單片機控制研發了油量檢測樣機,研究了基于北斗定位測距的油耗檢測算法。通過在4種不同路況下的試驗數據采集,證實了檢測樣機的合理性和研究算法的正確性,并通過對試驗數據分析,說明了路況對油耗數據影響重要性,結果表明:道路摩擦力越小,行駛速度越大,加減速頻率越少,車輛越省油。
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
海峽科技與產業(2016年3期)2016-05-17 04:32:12
