基于線性自抗擾技術的艦炮伺服系統仿真研究
2018-09-02 11:08:30馬曉賀李翔宇
艦船科學技術 2018年8期
馬曉賀,李翔宇
(中國船舶重工集團公司 第七一三研究所,河南 鄭州 450015)
0 引 言
艦炮是裝備在艦艇上用于對海作戰、對空防御和對岸火力支援的重要武器之一。由于艦炮具有射速高、反應快、持續作戰能力強、使用效費比高等優點,得到各國海軍重視[1]。隨著未來海戰的不斷變化,艦炮面臨著新的挑戰和要求,不斷推動著艦炮向著高精度、遠射程的方向發展。艦炮伺服系統的控制精度直接影響著射擊精度。同時,艦炮伺服系統是一個負載變化大、非線性因素多、擾動強的非線性系統,采用傳統的PID控制算法難以實現高精度和強抗干擾性[2]。
本文在分析艦炮伺服系統組成結構并對負載轉矩進行分析的基礎上,將線性自抗擾控制技術運用到位置控制器中,利用Matlab/Simulink對系統進行仿真,對比了PID,LADRC和Model-assisted LADRC控制算法的控制效果。
經過聯合藥物治療后,觀察組患者的舒張壓及收縮壓為(70.04±5.33)mm Hg、(89.62±8.47)mm Hg,對照組患者的舒張壓及收縮壓為(102.25±8.14)mm Hg(140.52±10.09)mm Hg,兩組差異明顯,具有統計學意義,P<0.05,見表1。
1 伺服系統建模
1.1 伺服系統組成
艦炮伺服控制系統由控制器、驅動器、三相永磁同步電機(PMSM)、減速機、反饋元件等設備組成。系統采用典型的三閉環控制結構。其中,電流環和速度環在驅動器內部實現,均選用PI控制器,本文將重點對位置環控制器進行設計。控制結構框圖如圖1所示。
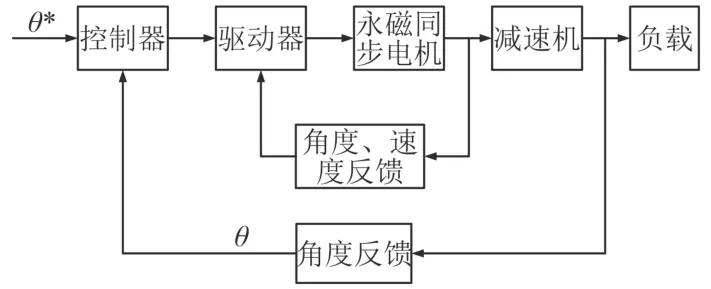
圖1 艦炮伺服系統控制框圖Fig. 1 Control block diagram of naval gun servo system
1.2 永磁同步電機數學模型
采用矢量控制策略使id=0,在dq坐標系下建立永磁同步電機數學模型,其電壓方程為:

dq軸的磁鏈方程為:

氣、液、超臨界CO2相態及物性計算模型研究………………………………………………………………王 慶,吳曉東(2.11)

計算模型除坡面設為自由邊界外,模型底部(z=2800)設為固定約束邊界,模型四周設為單向邊界。在初始條件中,不考慮構造應力,僅考慮自重應力產生的初始應力場。

1.3 負載分析
本文主要對水平方向的負載轉矩進行分析,永磁同步電機通過減速機連接負載,運動過程中需要克服的力矩有:方向座圈的摩擦力矩、射擊作用產生的附加阻力矩和慣性力矩。
1)方向座圈的摩擦力矩

2)后坐力附加的阻力矩
無論生活怎么奔波輾轉,我始終沒有忘記少年時期記憶中的原野、河流、青草、花朵、農田,還有長著一雙美麗大眼睛的小滿。
因為射擊角度不同,后坐力對座圈的作用方向不同,不考慮水平分力和傾覆力矩對座圈的影響。

在電機帶動負載運動過程中有:
3)慣性力矩

運動射擊過程中需要克服的總負載力矩

將線性狀態誤差反饋控制率(LSEF)設計為PD組合。

式中:i為減速比;為傳動效率。
國防科工局、總裝備部和國家保密局2014年聯合印發了《關于加快吸納優勢民營企業進入武器裝備科研生產和維修領域的措施意見》,通過軍地雙方近年來在政策宣傳、試點摸索、激勵引導等方面堅持不懈的努力,截至2016年3月,我國已有1000多家民營企業獲得武器裝備科研生產許可證,比“十一五”末期增加127%,[1]為軍品科研生產市場注入了新的活力,“民參軍”成為軍民融合發展的主流模式。但與此同時,在利用先進軍事科技技術推動經濟建設方面,受各種條件制約,步子還沒有邁開、成效還不太顯著,融合雙方的互動不對稱。
AIS是較常見腦血管類疾病[7]。有研究顯示,炎癥反應在AIS的發病及預后中發揮重要作用,其中,細胞因子作為炎癥反應所釋放出的炎癥介質,在AIS發生過程中起一定的調節作用[8-9]。IL-33可通過多種細胞和組織表達,對心腦血管起保護作用[10-11]。CXCL12可介導炎癥反應,較好地促進組織及血管再生。
2 模型輔助線性自抗擾控制器設計
自抗擾控制(ADRC)應用現代控制理論狀態觀測的原理,對系統的擾動情況進行觀測和補償,具有較強的魯棒性[3-4]。自抗擾控制技術已在伺服系統控制、飛行器控制及過程控制等領域中得到了很好的應用[5–7]。文獻[8]為提高火炮伺服系統的抗干擾性,采用ADRC對系統進行控制仿真,取得了較好控制效果。同時也發現其參數整定復雜,不利用工程應用。為使自抗擾技術得到更好的工程化應用,高志強提出了線性自抗擾控制(LADRC),減少了控制參數,簡化了參數整定過程[9]。
從式(5)~式(7)可以看出,負載轉矩在射擊和運動過程中不斷變化,這一變化可以看成是外界干擾。
艦炮伺服系統中面臨的主要干擾包括摩擦力矩、射擊附加力矩等。為提高系統的控制性能所設計的線性自抗擾控制器結構,如圖2所示。

圖2 LADRC結構框圖Fig. 2 Block diagram of LADRC
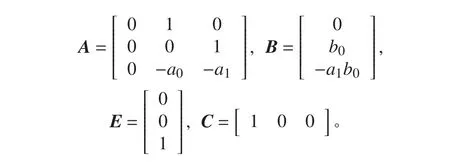
系統可簡化為1個二階系統,

式中:y,u分別為系統輸出和輸入;可以從模型中得到,并按仿真結果進行調整;w為擾動;f為總擾動;b0為已知部分。
A:產后恢復一定要從產前就開始著手準備。懷孕不代表就要猛吃,營養要適度、均衡。產前要不斷運動,產前我每天快步走五公里,把體重控制在合理的范圍內;產后我在順產三個月后恢復產前的體重,是因為我并沒有嬌慣自己,沒有因為喂奶而猛吃,而是適量、營養、均衡地吃。出了月子我就開始著重鍛煉松懈的腹部和大腿!推健腹輪是一項產后減脂塑形的好運動。如果不幸寶媽們在產前沒控制住自己,產后就要加倍努力哦!而且即便帶娃、喂奶、熬夜時也不能松懈。你會發現鍛煉身體不僅沒有增加疲憊,反而使你更有力氣和精力。

式中:
構造模型輔助線性擴張狀態觀測器(LESO)為:
高校校園是一個極具潛力與規模的市場,大學生有自己對于校園文化不同的理解與詮釋,他們擅于利用網絡表達自己的觀點與理念,新潮的思維使他們成為消費文化的引導者甚至締造者。

把特征方程的極點放在同一位置( )上,取觀測器的增益矩陣為:
這兩句話是關于兩組實驗結果的對比結論,通過重復動作的實施對象:their partners,達到強調的效果,也有效地將兩句話之間的對比關系凸顯出來。動物學是一門主要以實踐和研究為主的學科,在敘述實驗過程和結果時,常要重復使用實驗中的實驗對象,條件等相關詞匯,用以表示強調。因此,在動物學英語語篇中經常會大量使用重復的詞匯銜接手段來突出主題。
?ω0

使得:

折算到電機軸總負載力矩

根據線性自抗擾的參數整定方法[10],確定比例和微分系數:
緊頭位置偏差會影響單支煙的重量,如果緊頭位置偏差超過允許范圍,會導致同一支雙倍長煙切下的兩支單支煙一支偏重、一支偏輕,影響煙支標準偏差。由于平準盤和切刀盤同步情況較好,所以緊頭位置一般變動較小,故無須頻繁調節。其基本原理為檢測緊頭位置偏差,只有緊頭連續多次向同一方向偏移,并且偏移量超出允許范圍后才進行調節。事先標定出PLC輸出和平準盤相位之間的對應關系,然后進行定量調節。
令我沒想到的是,在新一輪的人事任命中,我竟然被任命為縣林業局的局長。蔡大姐和局里的那幫兄弟姐妹們來恭喜我的時候,我卻苦著一張臉要哭了。我對大家說,同志們啊,你們知道嗎?林業局是什么?那是一個火坑啊!前三任局長都已前赴后繼進了班房,我孫東西就是第四個啊!蔡大姐拍著我的肩膀說,小孫,不要那么悲觀嘛,只要你不貪不腐不爛,別人又豈奈你何?

3 伺服系統仿真及結果分析
本文利用Matlab/Simulink對艦炮伺服系統進行仿真,仿真系統如圖3所示。
階躍調炮30°,由圖4可知,采用PID算法的調節時間為0.65 s;采用LADRC的調節時間為0.48 s;而采用Model-assisted LADRC控制,系統的調節時間為0.45 s響應時間短,且超調最小。
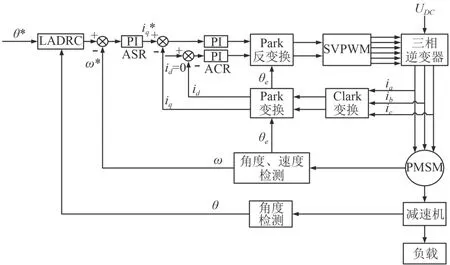
圖3 伺服仿真系統Fig. 3 Servo simulation system
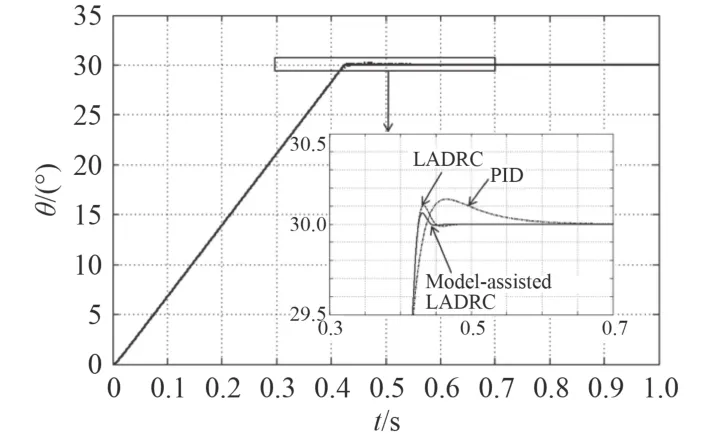
圖4 階躍響應對比圖Fig. 4 Step response diagram
系統穩定狀態下,根據1.3節中負載轉矩的分析,突加轉矩擾動。如圖5所示,在PID控制下艦炮水平角度有明顯波動,角度最大誤差為0.023°,恢復時間為0.25 s;在LADRC控制下,角度最大誤差為0.003°,恢復時間為0.1 s;在Model-assisted LADRC控制下,角度最大誤差為0.002°,恢復時間為0.07 s,控制效果最優。

圖5 干擾抑制對比圖Fig. 5 Interference suppression diagram
4 結 語
本文在分析負載轉矩的基礎上,利用模型輔助線性擴張狀態觀測器對系統總擾動進行觀測,并進行了補償。通過仿真試驗,對比了PID,LADRC和Modelassisted LADRC的控制效果。試驗結果表明Model-assisted LADRC使系統具有更強的抗干擾性能和動態性能,且參數調節簡單。
