基于趨近律方法的艦載遙控武器站滑模控制研究
2018-09-02 11:08:34張曉鐸趙遠征
艦船科學技術 2018年8期
關鍵詞:系統
張曉鐸,趙遠征
(鄭州機電工程研究所,河南鄭州,450015)
0 引 言
隨著我國海外權益的日益增長和周邊形勢的復雜化,我國海上武裝力量面對日益多元化的海上威脅。海軍在面對恐怖分子小型快艇的迫近襲擊時,中、大型水面艦艇上安裝的導彈、艦炮武器費效比過高,不能即時經濟的對類似小型水面目標進行精確打擊。面對這種特殊需求,就需要一種自動化程度高、可艙室內遙控操作、能抵御非傳統威脅、配置靈活的有效武器[1]。隨著我國海洋戰略的調整,對釣魚島海域、南海海域的巡航和執法日益頻繁,從增加威懾、打擊力度層面來說,設計一型通用化、模塊化的武器平臺能夠快速提高執法船的執法能力。在我國西南邊防地區,自湄公河巡航以來,由于巡航區域地理條件復雜,安全形勢不容樂觀,對遙控武器平臺的需求也越來越迫切。基于上述背景,既可以作為獨立的作戰單元,也可以為其他精確制導武器提供實時作戰信息支持,可廣泛應用于海防、邊防、反恐以及局部沖突,具備態勢感知和快速精確打擊的艦載遙控武器站應運而生。
艦載遙控武器站最早應用于公安邊防湄公河聯合巡邏,從央視披露情況可以看出,該型武器站能夠經受頻繁沖擊振動和長時間連續工作。艦載遙控武器站當前使用最多的是海警執法船,2016年6月19日,央視報道海警21115艦訪問韓國,艦載遙控武器站工作畫面曝光,圖1所示為某型艦載遙控武器站。

圖1 某型艦載遙控武器站Fig. 1 A certain type of the naval remote controlled weapons station
1 艦載遙控武器站控制系統優化方向
隨著艦載遙控武器站的深入應用,特別是隨著無人化、智能化的需求指引,遙控武器站當前急需解決一個關鍵問題:如何利用有限成本盡可能實現最優的控制性能,從而滿足未來大批量的應用需求。從當前技術層面分析,控制系統可以從以下兩點研究:
1)無位置傳感器下轉子位置估計
艦載遙控武器站的位置傳感器檢測,目前成熟的方案是在電機軸端安裝機械位置傳感器,如增量或絕對式的數字編碼器,或者旋轉變壓器等[2]。這樣武器站的控制精度、動態響應特性取決于傳感器的性能,選擇的傳感器不同,其控制性能差別很大;其電機絕大多數采用安裝傳感器表貼式永磁同步電機(Surface-Mounted PMSM,SPMSM)驅動方式,永磁電機體積較大、電機結構相對復雜,不便于實現電機和負載的手動解脫,以實現手動和遙控模式的切換;當傳感器出現故障時將嚴重影響控制系統性能,極易導致驅動器報警從而停止工作。此外,1套性能優異的傳感器裝置十分昂貴,而且方位和俯仰2軸均需要編碼器,使得系統成本大大增加,這影響了艦載遙控武器站低成本大批量列裝的定位。內置式永磁同步電機無位置傳感器控制方案有望實現高性價比、高可靠驅動系統[3]。
2)控制算法優化,提高射擊精度
艦載遙控武器站控制系統是一個多變量、非線性、強耦合的系統,對于參數攝動和外部負載擾動非常敏感,傳統的PI控制方法因其算法簡單、調速方便等優點,在其控制系統中得到了廣泛的應用。但是PI控制方法需要系統精確的數學模型,對于艦載遙控武器站這樣一個具有強后坐力、變摩擦力和變轉動慣量的非線性系統,在跟蹤射擊狀態下隨機擾動難以建模表征,采用傳統的控制方法很難達到系統的要求,進而難以獲得理想的高精度控制性能[4]。因此,有必要研究基于PMSM控制系統的非線性控制方法。
從工程層面來講,本文主要進行控制算法的優化,增強控制算法的魯棒性,從而提高武器站跟蹤射擊時抗干擾能力,提升武器站射擊精度。
關于控制系統優化的研究很多,如模糊控制在控制系統的應用研究,但是實際應用中由于模糊化、專家規則庫、去模糊化的復雜應用,使得系統的控制精度受到限制;文獻[5]提出了神經網絡控制理論,但是通過自適應學習的系統參數整定需要比較長的數據處理時間,需要使用速度很快的微處理器來提高系統實時性,實際上增加了系統設計的成本。20世紀50年代出現的滑模變結構控制理論是一種非線性控制理論,滑模變結構控制以其對系統數學模型精確度要求不高,對系統參數攝動和外部擾動具有完全魯棒性等優點,能夠實現系統的漸進穩定性[6]。因此,有必要開展艦載遙控武器站控制系統的滑模控制研究。
2 控制器設計
2.1 矢量控制
艦載遙控武器站伺服系統閉環控制原理圖如圖2所示。
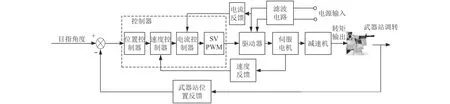
圖2 武器站伺服系統閉環控制原理圖Fig. 2 The schematic diagram of closed loop control of the servo system of the weapon station
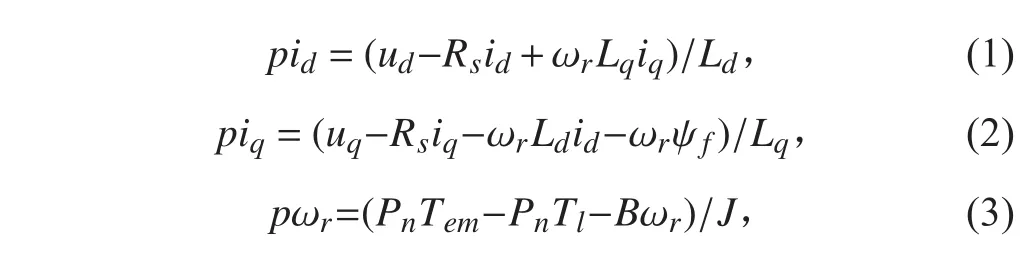
根據以上公式,可以得到如下形式的狀態方程:

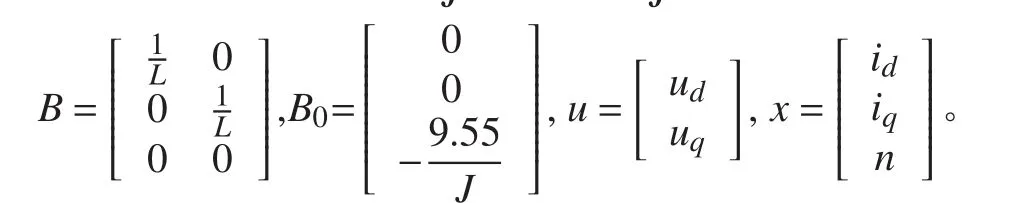
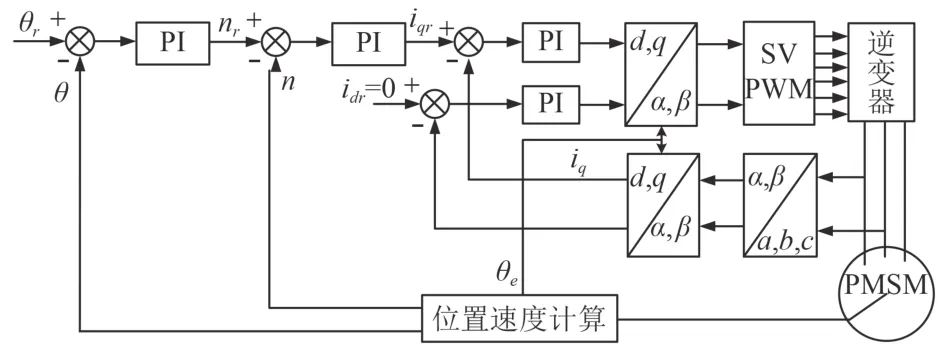
圖3 基于矢量控制的位置控制原理圖Fig. 3 The position control schematic diagram based on the vector control
2.2 滑模控制器控制設計

由式(3)可得:

武器站跟蹤誤差及其導數為

設計滑模函數為

對滑模面S求導,根據式(6)和式(8)可得

為了消除系統抖振,采用變指數趨近律,得到

結合式(5)、式(9)和式(10)可得相應的控制律函數為

采用變指數趨近律,在遠離切換面時,在常規趨近律的基礎上,加入速度誤差的絕對值,可以使系統加速趨近滑模面,提高系統的動態響應;當運動點接近切換面時,隨著速度逐漸降低,速度誤差的絕對值漸趨于0,從而保證系統平滑的到達滑模面[8]。
2.3 穩定性證明
針對上述滑模控制器選用Lyapunov函數來證明其滑模平面穩定且存在滑動模態。
定義Lyapunov函數為

對其求導,則有
3 仿真研究
艦載遙控武器站控制系統永磁同步電機參數(標幺值)為:電機功率為極對數為定子電阻為轉動慣量為直軸電感交軸電感磁鏈摩擦系數減速比在Matlab/Simulink環境下搭建基于矢量控制的武器站伺服系統三環仿真模型,如圖4所示。
模型中位置指令輸入trackingline.mat模擬上層隨機指令,以驗證遙控武器站伺服系統能夠即時響應跟蹤指令。速度環SMCC控制器是本文搭建的變指數趨近律滑模控制器,PI控制器為常規PI控制器,SMCR控制器是根據指數趨近律搭建的控制器[9]。

圖4 艦載遙控武器站位置控制仿真模型Fig. 4 The position control simulation model of the naval remote controlled weapons station
本文對常規PI速度控制器和變指數滑模速度控制器SMCC進行了仿真對比,仿真條件為轉速參考值設定為500 r/min,在t=0.5 s突加50 N·m負載。仿真結果如圖5~圖8所示。
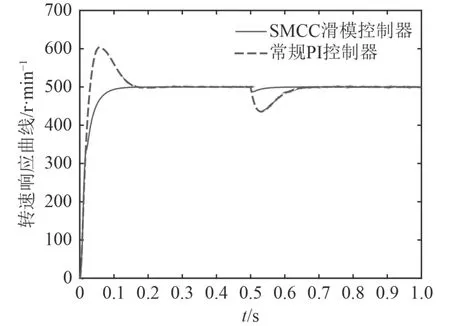
圖5 SMCC控制器轉速響應曲線對比Fig. 5 The comparison of speed response curve of the SMCC controller
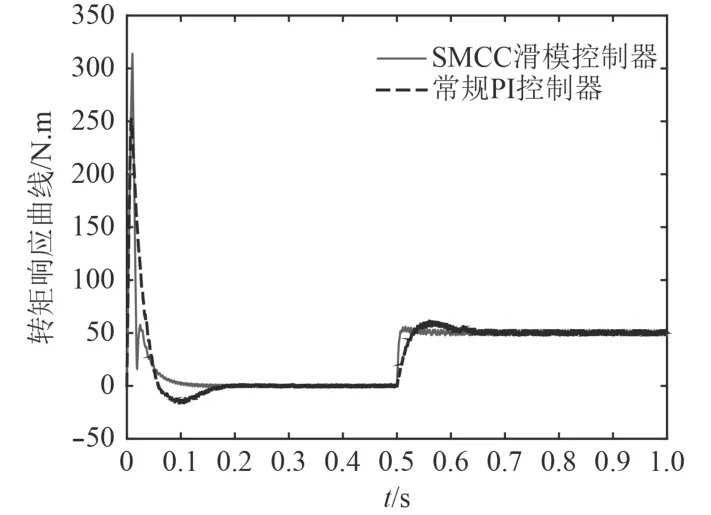
圖6 SMCC控制器轉矩響應曲線對比Fig. 6 The comparison of torque response curve of the SMCC controller
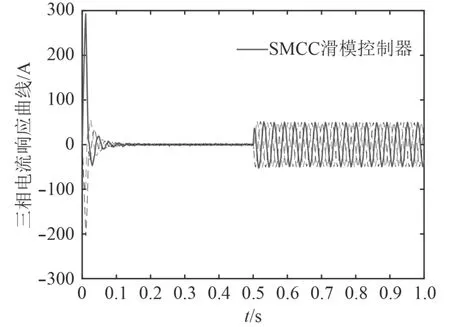
圖7 SMCC控制器下三相電流響應曲線Fig. 7 Three phase current response curves under the SMCC controller

圖8 常規PI控制器下三相電流響應曲線Fig. 8 Three phase current response curves under the conventional PI controller
圖5轉速響應曲線中武器站控制系統在速度環采用常規PI控制器時,啟動階段轉速超調較大,轉速最高到602 r/min,穩定時間為0.2 s。突加負載后,轉速下降64 r/min,在0.66 s系統達到穩定狀態。采用SMCC滑模控制器時,啟動階段控制系統基本無超調,轉速穩定時間僅為0.15 s。0.5 s突加負載后,系統超調明顯減少,轉速僅下降12 r/min,穩定時間由0.16 s縮短為0.09 s。
圖6轉矩響應曲線可以明顯看出,采用SMCC控制器時,系統突加負載時轉矩基本無超調,且響應速度明顯比采用常規PI控制器時快。
圖7和圖8中三相電流曲線比較可以看出,采用常規PI控制器時電流脈動較大,采用SMCC控制器時電流波形平滑,基本符合正弦曲線。
通過分析圖5~圖8,說明所設計的變指數趨近律滑模控制器響應速度快,抗干擾能力強,魯棒性好。
上述模型基于采樣周期和數據量限制,仿真時間有限,因此搭建基于遙控武器站數學模型的仿真系統,對SMCC速度控制器和常規PI速度控制器下的位置跟蹤情況進行仿真,仿真結果如圖9和圖10所示。
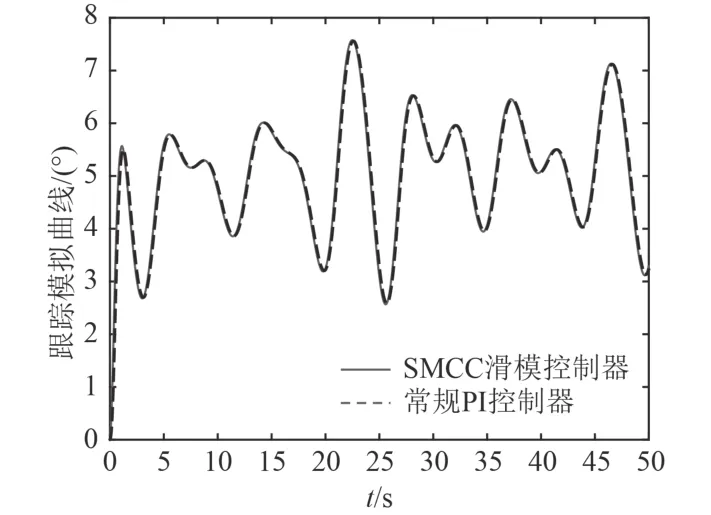
圖9 SMCC控制器下模擬跟蹤曲線Fig. 9 Analog tracking curve under the SMCC controller
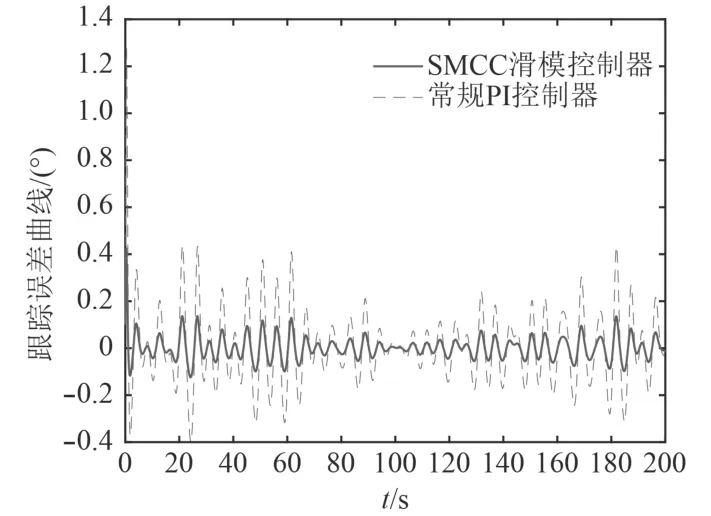
圖10 SMCC和普通PI控制跟蹤誤差比較曲線Fig. 10 The comparison curves of tracking error between the SMCC and the conventional PI control
從圖9可以看出,采用SMCC控制器和常規PI控制器系統均能跟隨模擬指令運動,但采用常規PI控制器相比SMCC控制器跟隨時間相對滯后。從圖10中可以看出,在伺服系統啟動和換向階段,采用普通PI控制的跟蹤誤差要遠遠大于SMCC控制下誤差,前者的均方根植最大超過1.2°,而后者最大不超過0.5°。
通過以上仿真對比,可以看出,在矢量控制條件下,采用SMCC速度控制器的武器站控制系統具有更好的跟隨性能和更強的抗擾動能力。
4 結 語
針對艦載遙控武器站跟蹤射擊精度需求逐步提升的現狀,在滑模變結構控制的基礎上,兼顧減小滑模抖振,實現武器站控制系統的高精度控制,本文采用變指數趨近律,設計了變指數滑模控制器,與常規PI控制器進行對比,仿真結果表明采用所設計的控制器遙控武器站能夠很好的跟隨目標指令,且系統抗干擾能力強,魯棒性好。本文設計的控制算法對艦載遙控武器站算法優化具有工程指導意義。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
