測站點近似坐標精度對GNSS測站解算的影響分析
2018-09-03 00:56:00劉洋洋黨亞民許長輝
導航定位學報 2018年3期
關鍵詞:分析
劉洋洋,黨亞民,許長輝
(中國測繪科學研究院 大地測量與地球動力學研究所,北京 100830)
0 引言

當前,國內外學者對影響GAMIT軟件基線解算精度的各因素進行了研究。文獻[4]利用間隔3 m的測站形成短基線,據(jù)此對不同短基線模型進行分析;文獻[5]研究分析了星歷誤差對基線解算的影響;文獻[6]分析了在GAMIT基線解算過程中不同參數(shù)的設置對基線解算精度的影響;文獻[7]基于GAMIT分析了分段線性法中參數(shù)估計的時間間隔對高精度GPS數(shù)據(jù)處理精度的影響。但是關于近似坐標對觀測數(shù)據(jù)解算的影響仍沒有合適的研究,以GAMIT軟件為例,該近似坐標文件名為“l(fā)file.”,生成方式大致有3種:直接提取觀測文件中位置信息、偽距單點定位獲取、雙差定位獲取。
本文采用中國大陸周邊的國際GPS服務(International GPS Service,IGS)站,利用GAMIT/GLOBK進行解算處理,將標準化均方根殘差(normalized root mean square,NRMS)作為評估精度的主要指標,顧及基線長度對解算精度進行分析,并在同一坐標框架下分析不同的坐標偏差。
1 處理前預分析
1.1 GAMIT/GLOBK軟件模塊計算流程
GAMIT的解算模塊主要有7個獨立但銜接的程序:軌道積分模塊、組成觀測方程模塊、單差自動修復周跳模塊、雙差自動修復周跳模塊、人工交互式修復周跳模塊、創(chuàng)建最終解算M文件模塊和利用雙差觀測值根據(jù)最小二乘法求解參數(shù)最終解算步驟,各模塊的解算步驟程序命令行如圖1所示。目前應用的GPS接收機的性能較以前有了很大提升,在解決周跳問題中,不必使用人工修復,僅需要重復使用SINCLN或DBCLN模塊即可[8]。
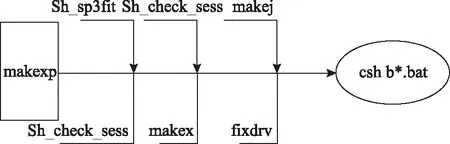
圖1 GAMIT軟件的數(shù)據(jù)處理流程
GLOBK軟件本質是卡爾曼濾波器,軟件利用觀測向量估計隨時間變化的狀態(tài)向量,通過綜合處理空間測量和大地測量數(shù)據(jù),得到在同一框架下的結果及速度場,輸入經(jīng)過GAMIT處理后的hfile、-o、-q等文件,輸出測站坐標等參數(shù)[9]。其計算流程框架如圖2所示。
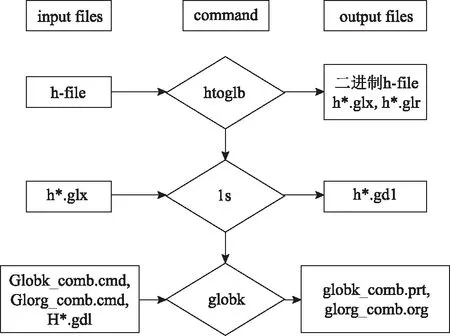
圖2 GLOBKT軟件計算流程
1.2 近似坐標的理論精度影響
GPS定位的實質原理是空間后方交會,由至少4顆衛(wèi)星與觀測站建立的站星距觀測方程通過初始的測站坐標反復迭代,并通過多顆衛(wèi)星得到最優(yōu)的觀測點最小二乘解。通過對觀測方程的測站坐標分析來發(fā)現(xiàn)初始坐標精度對解算帶來的影響,以偽距單點定位為例,將各種效應誤差化為等效距離誤差,站星距的觀測方程為

(1)

(Yj(t)-Yi)2+(Zj(t)-Zi)2]1/2
(2)

(3)

(4)


(5)
(6)
(7)
(8)

(9)
最終得到跟測站點近似坐標有直接關系的線性觀測方程為

(10)
由式(1)~(10)可知,在基線解算時,測站點近似坐標精度在解算過程中,對迭代次數(shù)及最終解算精度方面有影響,由上式更可以直觀的看出,測站點近似坐標精度與迭代次數(shù)成反比,與最終解算精度成正比。但是在實際解算中,需要顧及基線長度和解算時間等需求,如何根據(jù)不同的情況確定最優(yōu)的解算方案,是值得具體探討的。
2 實驗與結果分析
由于需要分析坐標精度的影響,所選參考站需穩(wěn)定,觀測文件質量需較好,故選取2017年1月IGS站中中國區(qū)域及周邊的23個站(BJFS、BJNM、CHAN、SHAO、TCMS、TWTF、TNML、ULAB、URUM、LHZA、BADG、TASH、POL2、CHUM、OSN4、SUWN、DAEJ、AIRA、GMSD、USUD、MIZU、TSKB、KSMV)進行處理分析,圖3為測站點分布圖。為了比較近似坐標精度對解算的影響,將BJFS、TWTF、URUM站設置為控制站,其他站設置為非固定站,設置該3站地心緯度、經(jīng)度松弛量為0.05 m,設置矢徑R松弛量為0.10 m,坐標約束設置為0.50、0.50、0.50 m;采用IGS提供的最終精密星歷,基線處理類型設置為松弛型,使用無電離層的線性組合的觀測值類型,設置VMF1的對流層映射函數(shù)模型以估計對流層延遲參數(shù),采用ITRF2008參考框架在2017年1月的歷元時刻的坐標,使用J2000空間慣性參考系。基于GAMIT軟件分析以下3種形成“l(fā)file.”文件的方式對GPS數(shù)據(jù)解算的影響:
1)直接提取觀測文件中的近似坐標以形成近似坐標文件。
2)利用GAMIT中的svpos和svdiff模塊進行單點定位生成站坐標,形成近似坐標文件。
3)利用GAMIT中的svpos和svdiff模塊,將BJFS、TWTF、URUM的ITRF2008框架中的坐標作為基準,進行雙差定位得到其他站坐標,形成近似坐標文件。

圖3 所選取IGS站的分布
2.1 基線解算結果分析
NRMS表示解算出的單時段基線值與其加權平均值的偏離程度,是衡量GAMIT基線解算質量的1個重要指標,計算公式為
(11)

一般認為NRMS值應小于0.3,理想應小于0.25,則認為解算成功,否則需要檢查原因,重新處理。若是NRMS值大于0.5,表明基線解算是有問題的,可能存在有未除去大周跳、某解算參數(shù)有問題、解算模型設定有誤等情況。NRMS值越小,則代表基線解算的精度越高[11](如表1所示)。

表1 各方案解算NRMS值
由表可以看出,3種模式解算的NRMS的值均低于0.25,符合解算要求;而其中方案2),即進行單點定位形成近似坐標文件的處理策略的解算效果較其他2種更優(yōu),同時通過雙差定位得到的NRMS結果值最大。
為了分析對基線長度的解算誤差,選取了解算組合的所有基線進行統(tǒng)計分析,以基線長度為橫軸,基線解算出的關于長度的中誤差作為縱軸,統(tǒng)計結果如圖4所示。
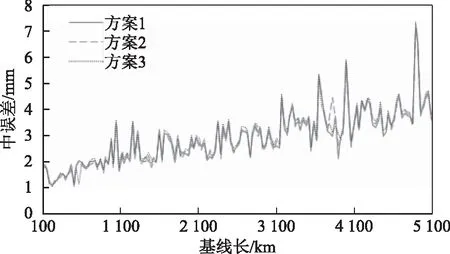
圖4 不同方案解算的基線長誤差
從圖4可以看出:3個解算方案對基線長度的影響大體上趨勢一致,并未因為不同方案而有較大差別,均值相互存在0.1~0.2 mm的差別,但是相對精度均達到1×10-9~1×10-10;3個方案統(tǒng)一表示出來,隨著基線的長度增加,基線長度的中誤差值隨之增大,說明解算的基線誤差跟測站距離有關,由此可見不同方案形成的lfile文件對基線長度的解算結果幾乎不具有影響。綜合表1和圖4的結果可知:僅從解算時間角度考慮,方案2)和方案3)需要單獨進行模塊的定位以得到近似坐標,方案1)最為快捷簡單;雖方案2)的NRMS值最好,但是方案1)的NRMS值也能較好地滿足要求;所以如果解算要求最高精度,而不怕時間損耗,則選擇方案2),如要較快捷地得到精度合理的結果,則選取方案1)。
2.2 平差結果分析
將3種方案解算的基線結果文件采用GLOBK軟件進行平差處理,將BJFS、TWTF、URUM 3站作平差起算站,采用ITRF2008框架在2017年年積日為第1天00:00:00時刻歷元的坐標,得出3種方案在同一框架下的坐標,并提取出該歷元時刻的ITRF坐標當作真值,分別將不同方案得出的坐標值與ITRF值作差并取絕對值,以此來比較3種方案坐標解算的精度,以下列9站的X、Z值為例,圖5為對比結果。
由圖5可以看出:在水平的X方向,方案2)的差值最大,與基線結果中該方案的NRMS值最小成反比,方案1)、方案3)的坐標值近似,并且由于方案3)雙差定位中將BJFS、BJNM、TWTF作為參考站,所以在最終結果中,方案3)的該3點坐標精度最好,而方案1)總體較好,與ITRF坐標差值幾乎都在2 mm以下;垂直Z方向,總體方案2)較好,恰恰與X值相反,卻跟方案2)的NRMS值最小相對應,而方案3)的Z值精度最低,但是在所有的站中卻不穩(wěn)定,最大和最小相差10 mm,且作為起算站的TWTF站精度最差,也間接反映了該方案的不穩(wěn)定性。因此綜合比較X、Z精度差值可知,方案1)總體更穩(wěn)定,精度也合適,沒有出現(xiàn)較大起伏,加上考慮在基線解算時的時間因素,在應用GAMIT解算數(shù)據(jù)時,推薦采用方案1),即直接提取觀測文件中的近似坐標。
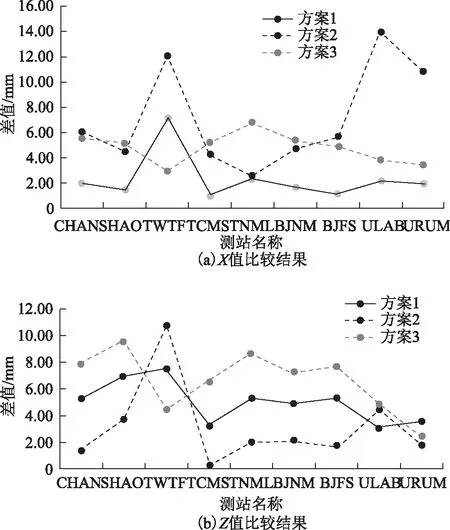
圖5 坐標解算值與真值比較結果統(tǒng)計
3 結束語
文章采用了中國區(qū)域周邊的IGS站數(shù)據(jù),對生成坐標近似文件的不同方法進行了基線解算和平差處理,從NRMS值、基線精度和平差坐標差值等方面進行了對比分析,并考慮了處理過程中的時間因素,結果表明:
1)在利用GAMIT進行數(shù)據(jù)處理時,近似坐標文件的精度不同,不會造成解算結果文件的較大差異,都在合理范圍內;并且并非利用雙差定位得到的近似坐標參與解算的效果就一定最好,而是在大區(qū)域工程中,利用單點定位得到的基線解NRMS值效果最好,而小區(qū)域下,仍需做進一步的探索。
2)基線解算結果和坐標偏差在Z方向都是最大的誤差因素,即使在水平方向誤差最小的基線中,其Z方向誤差也偏大,說明在數(shù)據(jù)解算的研究中應當著重于改善Z方向的誤差。
3)如考慮解算的時間因素,既滿足精度要求,也方便快捷,應當直接利用觀測文件中測站的概略位置,而GAMIT10.6之后的版本可以直接通過設置配置文件來達到該目的。
猜你喜歡
現(xiàn)代畜牧科技(2021年9期)2021-10-13 06:39:14
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
電子制作(2018年18期)2018-11-14 01:48:24
山東工業(yè)技術(2016年15期)2016-12-01 05:31:22
當代經(jīng)濟研究(2016年5期)2016-12-01 03:12:05
現(xiàn)代農(nóng)業(yè)(2016年5期)2016-02-28 18:42:46
出版與印刷(2016年3期)2016-02-02 01:20:11
中國中醫(yī)藥現(xiàn)代遠程教育(2014年11期)2014-08-08 13:23:44
華北水利水電大學學報(社會科學版)(2014年3期)2014-04-16 04:38:31
終身教育研究(2014年5期)2014-02-28 01:23:06