爬樓梯輪椅安放機構的改進基因建模構型設計
2018-09-04 13:13:06王延祥楊先海
山東理工大學學報(自然科學版) 2018年5期
王延祥,楊先海
(山東理工大學 機械工程學院,山東 淄博 255049)
爬樓梯輪椅是一種最佳的解決老年人以及殘障人士出行的方案.目前現有的爬樓梯輪椅對尺寸跨度大的臺階適應性不高,或者對臺階有傷害,導致無法進行大范圍的推廣和應用[1-2].本文提出一種新型填充式爬樓梯輪椅設計思路,并對其安放機構進行構型設計.
1 一種新型爬樓梯輪椅
本文提出了一種新的爬樓梯思路,將樓梯臺階看成斜坡上“凹陷”的溝塹的模型.基于上述的“凹陷”樓梯臺階模型,提出了通過“輪番填補”“凹陷”樓梯臺階,從而實現從爬樓梯向爬坡的轉變[3],思路示意如圖1所示.
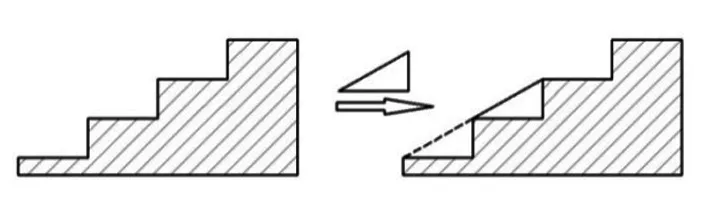
圖1 新型爬樓梯思路實現示意圖Fig.1 The illustration of a new type climbing stairs
新型爬樓梯輪椅的構想就是基于上述的“輪番填補”“凹陷”樓梯臺階的思路發展而來,其機械部分主要由車體、墊塊輪換裝置、墊塊安放裝置、安全防傾倒裝置4部分組成.墊塊輪換裝置將墊塊以及墊塊安放裝置從上一個工作位置送到下一個需要“填補”的位置.由于設計的墊塊具有尺寸可調性,使得該新型爬樓梯輪椅具有適應性和穩定性高以及對樓梯臺階無損傷等優點.
2 基于任務約束的變胞機構改進基因建模構型方法
變胞機構的基因建模方法實質是將一個機構整體拆分成滿足子構態要求的子機構.本文基于基因建模方法,創造性地引入“拼接聚合”運算[4-6],進而提出一種基于任務約束的變胞機構改進基因建模構型方法,其具體步驟如圖2所示.

圖 2 變胞機構構型設計步驟Fig.2 Design steps of metamorphic mechanism
1)設計任務分解以及任務約束的分析.變胞機構一個工作周期內的總體任務為F,它由數個子任務組成,所以盡可能將設計任務分解為一般簡單機構可以實現的子任務.每一個子任務對應一個子構態,則機構的子工作構態定義為Ui(i=1,2,3,…,n).
2)各子工作構態的構型分析和形態學表的建立.根據分解的子任務,羅列出滿足設計約束要求的子機構.本文將采用子構態的形態學表來描述.
3)各子機構運動鏈的可行性分析.分析步驟2)方案中各子機構實現的難易程度,根據各方案子機構端口相似性的高低實現方案的選擇.

本文中各機構的子構態組成將采用下式描述:
式中,Ui表示實現第i種子構態的機構.
5)基因片段的“拼接聚合”.這是變胞機構構型設計中最重要、最核心的一部分,“拼接聚合”可表示為

但是,在此過程中也會出現變異的情況,如:

3 具有變胞功能的墊塊安放機構的構型設計
3.1 機構的任務約束分析
應用所提出的變胞機構構型綜合方法,設計一種可以在有限的空間內能完成墊塊安放的機構,該機構可應用于輪番填補爬樓梯輪椅.由于空間有限,加之墊塊的尺寸限制,機構的驅動數和末端執行件(墊塊)的運動軌跡就已經確定了.機構的驅動數為1,末端執行件的運動軌跡如圖3中所示,由A點到B點,最外圍的虛線矩形框即為機構的工作空間,C、D的虛線框分別為動力裝置空間和另一側墊塊的空間.

圖3 機構的運動軌跡及工作空間Fig.3 The movement trajectory and working space of the mechanisms
首先對該機構的任務約束進行全面分析:(1)驅動工作空間有限,驅動件數量為1;(2)連接桿組工作空間有限;(3)末端執行件需從點A到點B,末端執行件位姿保持水平,末端執行件數量為1;(4)子構態數量為2,子工作構態變換順序:豎直下放→水平推出→水平收回→豎直上收;(5)軌跡由A點沿實線到B點.
3.2 墊塊安放機構的構型設計
1)設計任務分解以及任務約束的分析
在一個工作周期中,機構的末端執行件需要完成下降、推出兩種動作,所以將這兩種子動作定義為該機構的兩種子工作構態,各機構按照工作流程進行順序變換.設定機構的總任務為F,則機構的兩個子工作構態為U1、U2.
2)各子工作構態的構型分析和形態學表的建立根據前面對機構任務的分解,可得各子機構的形態學表[4]見表1.
表1 各子機構的形態學
Tab.1 Morphology of each sub-mechanism

驅動形式子構態一(U1)子構態二(U2)T1 曲柄滑塊機構 曲柄滑塊機構 T2水平剪切機構/雙滑塊搖桿機構水平推出機構豎直豎直下放機構剪切機構/雙滑塊搖桿機構T3 凸輪機構凸輪機構
表1中:U1、U2分別表示墊塊安放機構豎直下放、水平推出的兩種子構態;T1表示驅動為輪系;T2表示驅動軌跡為直線;T3表示驅動為偏心輪系.分析可得4種方案:
方案1:“曲柄滑塊機構”+“曲柄滑塊機構”.
方案2:“剪切機構/雙滑塊搖桿機構”+“水平推出機構”.
方案3:“豎直下放機構”+“剪切機構/雙滑塊搖桿機構”.
方案4:“凸輪機構”+“凸輪機構”.
3)各子機構運動鏈的可行性分析
由于該機構需要工作在單驅動模式下,故要求各子構態機構中盡可能包含有相同形式的動力輸入,而且能保證該機構有序地完成子任務.通過分析可知,4種方案均滿足上述要求.
對上述4種方案子機構的動力傳遞方式進行考核,可得:
方案1:移動→轉動.
方案2、方案3:移動→移動(90°轉變).
方案4:移動→轉動.
根據上述4種方案子機構動力傳遞的難易程度,可得4種方案的可行性排序為
方案1、方案4>方案2、方案3
即方案1、方案4的可行性最高.
但是凸輪機構加凸輪機構的方案4占空間過于大且無法實現可逆運動,并不滿足本文的使用要求,故本文將采用曲柄滑塊機構加曲柄滑塊機構的方案1.
4)各子機構的基因分解
方案1與方案2機構按照子構態順序分解[5-6]的基因片段分別如圖4、圖5所示.
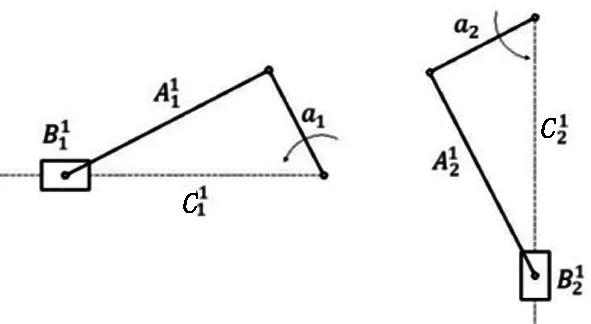
(a)片段1 (b)片段2圖4 方案1的基因分解Fig.4 Gene decomposition of plan 1
(a)片段1 (b)片段2圖5 方案2的基因分解Fig.5 Gene decomposition of plan 2
5)基因片段的“拼接聚合”
基于前文的描述,拼合過程中的墊塊安放機構可描述為
3.3 墊塊安放機構的“拼接聚合”設計過程
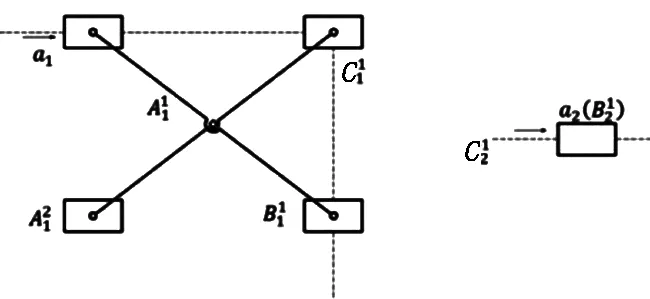
1)將兩個子機構的基因片段的“拼接聚合”端口從子機構中分離,并重新聚合端口.根據機構任務的順序,將可實現子工作構態的基因端口分離出來[7-8],如圖6所示.
(a)片段1 (b)片段2圖6 兩個子構態機構的拼接聚合端口Fig.6 Aggregate ports for two sub-architectures

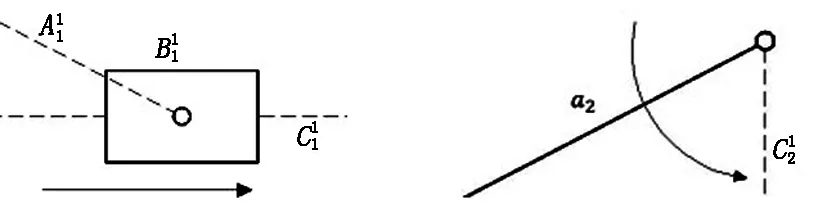
2)輔助構件的構建.由于該方案的動力傳遞形式為移動→轉動,故需要輔助構件將動力由第一子構態傳遞到第二子構態.由于尺寸的原因本文采用了齒輪齒條機構作為輔助機構.輔助構件的構建過程可表示為
式中:E2-a2表示驅動力輸入輔助構件;E1表示驅動力傳遞輔助構件.則方案1的機構雛形見圖7.
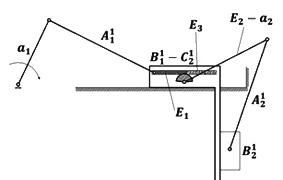
(a)方案1的整體機構

(b)滑塊細節圖圖7 方案1的機構雛形Fig.7 Prototype of plan 1

式中:D0為變胞源機構的運動副矩陣;D1為第一子構態機構的運動副矩陣.
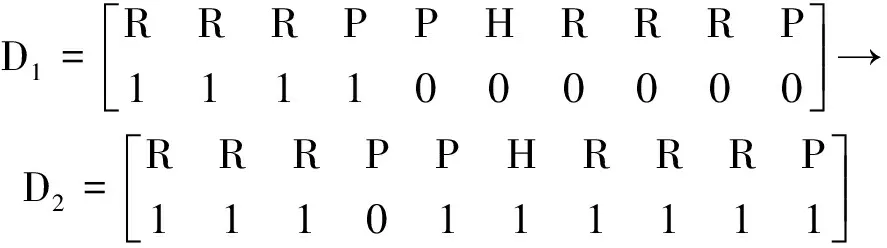
式中:D1為第一子構態機構的運動副矩陣;D2為第二子構態機構的運動副矩陣.
由于任務要求兩者的動作是獨立、有順序的,又因只能采用力變胞和幾何變胞的變胞形式[10],則需要在第一子構態動作完成的位置處設置一個位置限位保證在動力繼續輸入的情況下不再有動作,進而進入第二子構態的動作.由于第一子構態的動作已經完成,則只需要固接成一體即可,即成為機架.
基于上述分析,可得各構件的參與情況見表2.
表2 各構件的參與情況
Tab.2 The participation of each component

構態第一子構態機構構件第二子構態機構構件輔助構件a1A11B11C11a2A12B12C12E1E2E3第一構態11110000001第二構態11001111110
注:表中“1”表示參與該運動;反之“0”則是未參與該運動.
因此,墊塊安放變胞驅動機構方案1如圖8所示.

1.動力搖桿;2.左連桿;3.長滑塊;4.齒條;5.彈簧;6.半齒輪連桿;7.右連桿;8.執行滑塊;9.機架圖8 具有變胞機構的墊塊安放機構方案1Fig.8 A putting down mechanism with metamorphic mechanisms of plan 1
4 墊塊安放機構的ADAMS運動學仿真
為了驗證通過使用本文提出的基于任務約束的變胞機構改進基因建模構型方法設計的具有變胞機構的墊塊安放機構滿足設計時的軌跡任務要求,采用ADAMS軟件對所設計的機構進行運動學模擬仿真,并看其執行件的軌跡仿真結果是否滿足設計要求,進而證明該方法是切實可用的.
在ADAMS環境下建立上述具有變胞機構的墊塊安放機構模型,如圖9所示.圖9中,1為動力搖桿,鉸接到機架(地面)上;2與地面(機架)之間建立滑動的長滑塊;3為在長滑塊與齒條間建立的彈簧阻尼;4為固接在地面(機架)上的位置限位塊.

圖9 墊塊安放機構的ADAMS運動學仿真結果Fig.9 ADAMS simulation of a putting down mechanism
在圖9所示的機構模型中添加運動副約束,并在圖中所示的4處設置了一個位置限位,并且在執行滑塊上設置一個MARKER點用于軌跡測量[11].對墊塊安放機構進行運動學仿真,將其運動軌跡與軌跡約束條件進行對比.圖9中的粗實線即為機構末端運動的軌跡,可以看出,仿真結果與理論設想一致且滿足任務軌跡約束要求.所以具有變胞功能的墊塊安放機構的設計是成功的.
5 結束語
基于基因建模方法結合對變胞機構任務約束的全面分析并引入“拼接聚合”運算,提出了一種基于任務約束的變胞機構改進基因建模構型方法,并對該方法中的關鍵步驟進行了詳細介紹.本文所述的變胞機構構型方法,不僅具有操作性高的優點,而且使設計過程更為簡潔、直觀.
利用上述的構型方法,對新型填充式爬樓梯輪椅的關鍵部件——墊塊安放機構進行了構型設計,并對最終設計方案進行了基于ADAMS的運動學仿真,驗證了基于任務約束的變胞機構改進基因建模構型方法的正確性.
