基于PLC的電動缸位置控制系統設計
2018-09-04 16:36:42
制造業自動化 2018年8期
(長春工程學院 機電工程學院,長春 130012)
0 引言
當前,能夠實現位置控制的驅動元件主要有液壓缸、氣缸和電動缸等。電動缸因其傳動效率高、定位精度高、可靠性和安全性高、響應速度快、控制精準和同步性高的性能特點,在許多工業場合被逐步推廣使用。本項目驅動的元件是列車輪對,一個輪對的重量近2噸,采用電動缸的優勢在于避免低速重載下容易產生爬行現象發生。本文給出了以PLC和伺服驅動相結合的控制理念,以伺服電機驅動電動缸,實現了自主研發的輪對測量設備的升降機構的位置控制系統的設計和運行。
1 系統的總體構成和控制動作流程
1.1 系統總體構成
為了實現圖1所示的列車輪對的車輪直徑、徑向跳動、端跳、輪緣距、盤位差、輪位差、車輪內側距等參數的自動檢測,自主設計了輪對測量設備,設備采用輪軸兩端軸徑表面形成的車軸中心為徑向測量基準,即采用輪軸軸頸的外表面(安裝軸承處)作為徑向定位基準,由其形成的旋轉中心即為規定的徑向測量基準,使測量得到的數據更符合列車運行實際工況。輪對測量機由基座I、龍門框架Ⅱ、往復式輪對輸送平臺及升降機構Ⅲ、輪對定位基準支撐裝置Ⅳ、輪對旋轉驅動裝置Ⅴ、高精度移動檢測裝置Ⅵ六部分組成。如圖2所示。
其中往復式輪對輸送平臺及升降機構Ⅲ結構如圖2所示,由V型支撐座1、直線軸承2、軸承支撐框架3、電動缸4、移動框架5、線性導軌6和氣缸7組成。

圖1 輪對測量機檢測參數
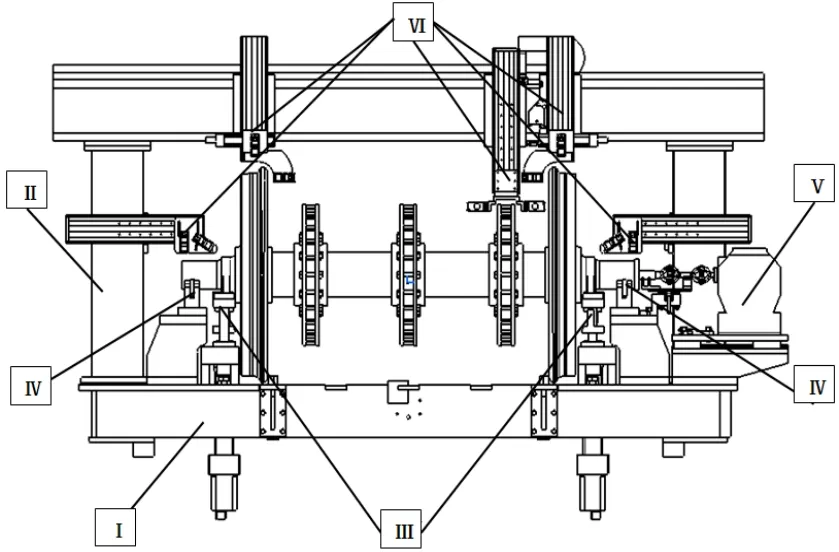
圖2 輪對測量機機械結構圖
1.2 系統控制動作流程
1)往復式輪對輸送平臺將待檢測輪對輸送到檢測位置;

圖3 往復式輪對輸送平臺及升降機構圖
2)左右伺服電動缸將輪對舉升使輪對脫離鐵軌;
3)氣缸將升降機構及輪對送到檢測位置;
4)左右伺服電動缸平穩的將輪對放在軸承基準支座上;
5)電機驅動萬向聯軸器使輪對在輪對定位基準支撐裝置上勻速旋轉,完成輪對的各參數檢測;
6)當輪對檢測完成時,伺服電動缸將輪對舉升一定高度使輪對脫離輪對定位基準支撐裝置;
7)氣缸將輪對送至迎輪位置;
8)伺服電動缸使輪對落在鐵軌上,完成一個輪對的檢測工序。通過同樣順序進行下一個輪對的檢測工作。
本文闡述的位置控制系統設計就是針對左右升降機構,采用PLC控制伺服電機驅動電動缸,達到位置控制要求,如圖4所示。

圖4 整機控制原理圖
2 電動缸位置控制系統硬件設計
2.1 系統硬件配置
系統選用西門子公司S7-200 PLC的CPU226CN,直流供電,直流輸入,帶有24個輸入16個輸出點。帶有6個30kHz的高速計數器,2個20kHz高速脈沖輸出,滿足自主研發的輪對測量設備的控制要求。
伺服電機及伺服放大器分別選用日本富士的GYS751D5-RC2和RYH751F5-VV2,功率750W。
電動缸選擇上海莫琳克的V080D1500P02500,額定推力1500kg,行程250mm,功率750W。
差分轉單端模塊又被稱做編碼器信號轉換器模塊,用于解決編碼器與PLC之間轉換,也用在PLC高速計數模塊、脈沖輸入端、電動機編碼器等與PLC之間轉換,特別適合電機自動控制等領域。優點在于能克服工控系統復雜的現場環境下的強干擾,排除強電場、強磁場等電氣干擾。本文即通過PLC和差分轉單端模塊來實現左右電動缸的位置控制,控制原理圖如圖5所示。
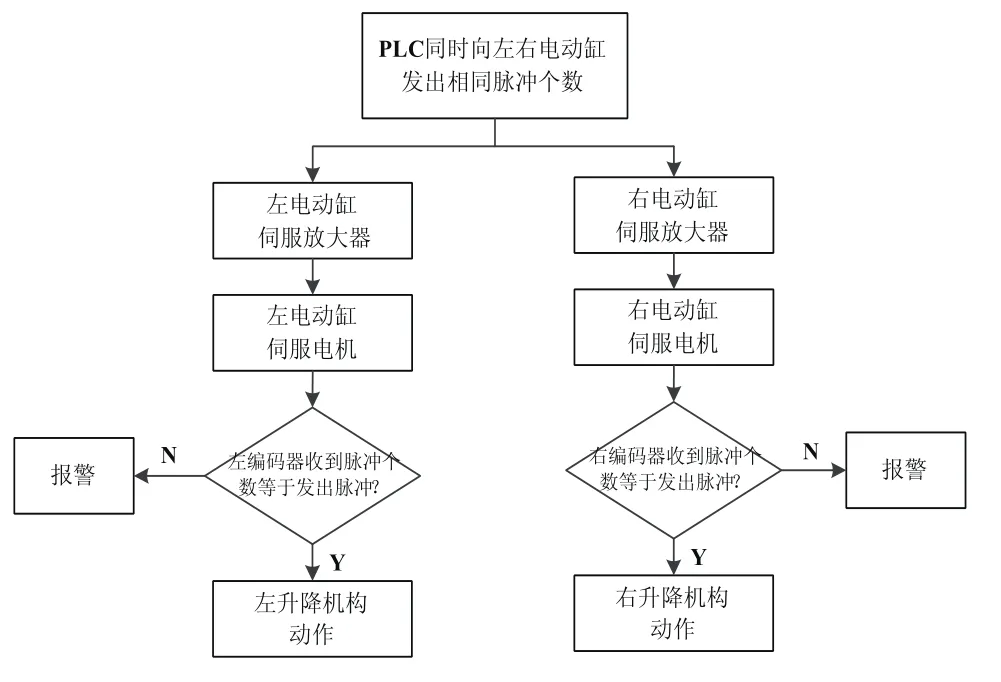
圖5 位置控制原理圖
2.2 硬件接線圖
通過配備如上硬件設置,進行S7-200 CPU226 I/O分配如下:I0.0:差分轉單端(左升降)A;I0.1:差分轉單端(左升降)B;I0.2:左升降伺服電機定位結束信號;I0.3:差分轉單端(右升降)C;I0.4:差分轉單端(右升降)D;I0.5:右升降伺服電機定位結束信號;I1.0:左升降伺服電機報警信號;I1.1:右升降伺服電機報警信號;I1.5:左升降電動缸-上限位;I1.6:左升降電動缸-下限位;I1.7:右左升降電動缸-上限位;I2.0:右升降電動缸-下限位;Q0.0:脈沖;Q0.1:脈沖;Q0.2:脈沖方向;Q0.3:伺服命令-2.CONT1;Q0.5:脈沖方向;Q0.6:伺服命令-2.CONT1。其中差分轉單端的接線圖如圖6所示。
3 電動缸位置控制系統軟件設計

圖6 差分轉單端接線圖
軟件方面主是完成PLC的STL的設計。為了實現位置控制,選用西門子PLC軟件提供的PTO脈沖編程模塊。主要包括如下三個重要部分的控制程序編譯。第一為:左/右電動缸上升和下降子程序,如表1所示。上升子程序設置SMB67為16#A5,即為選擇PTO的3段操作,選擇μs增量時基。下降子程序設置SMB77為同樣為16#A5。脈沖數通過輪對測量設備升降機構的上升/下降的距離和電動缸參數來確定,本項目定為324000個脈沖。

表1 左/右電動缸的升降子程序
程序編譯的第二重要部分是:初始化高速計數器。左電動缸選擇HSC0操作模式;模式選擇9,即為A/B相正交,故控制位設定SMB37=16#FC。右電動缸選擇HSC4操作模式;模式選擇9,即為A/B相正交,故控制位設定SMB147=16#FC。
程序編譯的第三重要部分是:中斷程序。中斷的實現是PLS指令每完成一次脈沖輸出將產生一次中斷,其中左電動缸的中斷號為12,右電動缸的中斷號為29。中斷指令為ATCH。本程序中使用全局中斷,因此調用中斷程序時只需啟用一個事件的中斷。中斷程序程序如下:

表2 左/右電動缸的高速計數器初始化

4 結束語
本系統采用西門子S7 200 PLC、伺服電機、電動缸、差分轉單端的硬件配置,編程實現了列車輪對測量設備的升降機構的位置控制。本系統隸屬于半閉環控制系統,能夠實現較高的定位精度和運行速度,能滿足測量的節拍需求和位置精度要求,定位精度達到0.1mm。
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
海峽科技與產業(2016年3期)2016-05-17 04:32:12