基于混合灰狼算法實現(xiàn)第Ⅱ類機器人U型裝配線能耗優(yōu)化
2018-09-08 08:14:54張子凱唐秋華張利平李梓響
中國機械工程 2018年16期
關(guān)鍵詞:分配
張子凱 唐秋華 張利平 李梓響
1.武漢科技大學(xué)冶金裝備及其控制教育部重點實驗室,武漢,430081
2.武漢科技大學(xué)機械傳動與制造工程湖北省重點實驗室,武漢,430081
0 引言
裝配線是一種常用于汽車、電子等行業(yè)的產(chǎn)品制造系統(tǒng)。在裝配線上,產(chǎn)品從入口線的工位依次進入下一工位進行裝配,直到從出口線的工位出來。該過程中,工序的裝配順序需滿足工序間的優(yōu)先關(guān)系,且工位的加工時間應(yīng)小于節(jié)拍。不同于傳統(tǒng)的直線型裝配線,U型裝配線的同一工位既可以包含入口線工序,也可以包含出口線工序,這使得U型裝配線具有更高的生產(chǎn)效率和柔性。如今,自動化技術(shù)已逐漸應(yīng)用到企業(yè)的裝配系統(tǒng),機器人開始逐漸替代工人在裝配線上進行作業(yè)的裝配。
M ILTENBURC等[1]提出并構(gòu)建了U型裝配線平衡的數(shù)學(xué)模型后,眾多學(xué)者開始研究U型裝配線平衡問題。G?K?EN等[2]采用最短路徑法、OGAN等[3]提出分支定界法來求解簡單U型裝配線平衡問題。LI等[4]提出多規(guī)則啟發(fā)式算法求解第二類U型裝配線平衡問題。RABBBANI等[5]同時考慮混流U型裝配線的工位負(fù)載和線效率,提出了基于規(guī)則編碼的遺傳算法來實現(xiàn)該類問題的求解。張子凱等[6]設(shè)計了基于Bender分解的多目標(biāo)快速非支配遺傳算法來實現(xiàn)多重資源約束下的第一類U型裝配線平衡問題的求解。查靚等[7]運用基于信息素更新的蟻群算法求解第一類U型裝配線問題。劉冉等[8]采用多目標(biāo)克隆免疫協(xié)同進化算法來實現(xiàn)混流U型裝配線平衡與調(diào)度的多目標(biāo)集成優(yōu)化問題的求解。唐秋華等[9]基于隨機機會約束規(guī)劃,通過確定性等價和線性化處理模型,采用GAMS/Cplex實現(xiàn)小規(guī)模U型裝配線的平衡問題的優(yōu)化。
總體來看,上述研究主要是研究半自動化或人工U型裝配線,主要目的是在生產(chǎn)節(jié)拍和優(yōu)先關(guān)系的約束下,將各裝配工序分配到工位。不同于該類裝配線,機器人裝配線不僅要分配工序到工位,還應(yīng)當(dāng)分配機器人到工位。因此為實現(xiàn)機器人U型裝配線工序和機器的協(xié)同優(yōu)化,本文以能耗為優(yōu)化目標(biāo),提出一種基于隨機鍵編碼的混合灰狼優(yōu)化(hybrid gray w olf optim ization,HG?WO)算法,并將算法與原始灰狼算法進行對比以證明算法的優(yōu)越性。
1 機器人U型裝配線
機器人U型裝配線由若干個工作站組成,每個工作站一般配備一個機器人來完成裝配工序,因此,機器人U型裝配線問題主要涉及兩類問題:工序分配和機器人分配。
U型裝配線中,某一工序的直接前序或直接后序分配到工作站,該工序才能進行分配。為描述這種關(guān)系,URBAN[10]提出了影子優(yōu)先約束關(guān)系(圖1)。基于影子優(yōu)先約束關(guān)系分配工序到工作站時,每個工作站的裝配時間應(yīng)當(dāng)小于或等于預(yù)定的節(jié)拍。
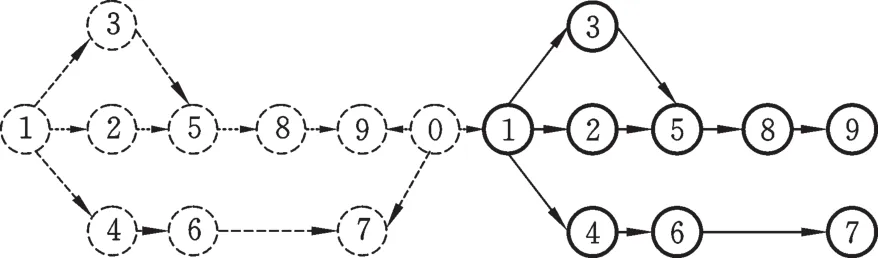
圖1 影子優(yōu)先約束關(guān)系Fig.1 Phantom p recedence relationship
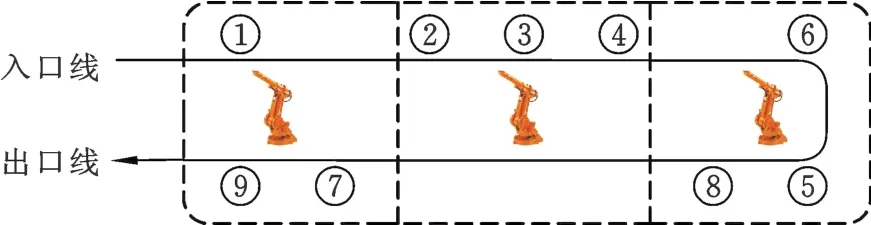
分配機器人到工作站時,一般假設(shè)機器人的數(shù)量等于工作站的數(shù)量,且各工序在不同機器人上的裝配時間不同[11]。由于部分機器人不能裝配所有的工序,故當(dāng)某一機器人無法裝配某一工序時,設(shè)置其裝配時間為一個極大值。圖2展示了機器人U型裝配線。
機器人裝配線平衡問題中,一般以能耗為其主要的優(yōu)化目標(biāo)。裝配線問題中,能耗特指電能耗,主要包含兩部分:裝配能耗和待機能耗。各能耗分別與裝配時間和待機時間成正比[12],計算公式如下:
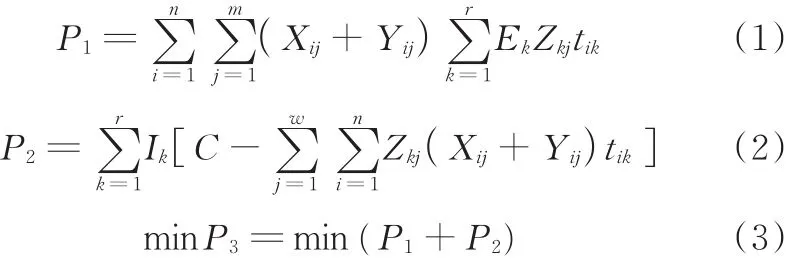
式中,P1為裝配能耗;P2為待機能耗;P3為總能耗;n、m、r分別為工序數(shù)、工作站數(shù)和機器數(shù);Xij(Yij)為1表示工序i分配到工作站j的入口線(出口線);Zkj為1表示機器人k分配到工作站j;tik為工序i在機器人k上的裝配時間;Ek、Ik分別為機器人k的裝配單元能耗和待機單元能耗;C為節(jié)拍。
2 混合灰狼算法
原始的灰狼算法模擬灰狼尋找獵物的行為來搜索最優(yōu)解。灰狼社會有4種狼:α、β、δ和ω,其中,具有最佳適應(yīng)度的狼稱為α,具有第二、第三最佳適應(yīng)度的狼分別稱為β和δ,其余的狼稱為ω。灰狼算法中,低等級的狼必須服從高等級的狼,所以算法中的狩獵過程(優(yōu)化過程)主要由α、β和δ引導(dǎo)ω包圍獵物,并不斷更新其位置,更新方式如下:
式中,t為當(dāng)前迭代次數(shù);Xp為獵物位置;X為灰狼的位置;A、C為系數(shù);r1、r2為服從[0,1]均勻分布的隨機變量;a在迭代過程中,從2到0線性下降。
在α、β和δ引導(dǎo)ω包圍獵物時,由于獵物的位置是未知的,該算法假設(shè)獵物位于α、β和δ之間,所以在α、β和δ引導(dǎo)下,灰狼ω位置更新如下:
其中,Xα、Xβ、Xδ分別為α、β和δ的位置。
上述灰狼算法常用來處理連續(xù)問題,而機器人U型裝配線為一個離散問題。為此,有效的編碼方式和進化機制是實現(xiàn)灰狼算法求解機器人U型裝配線平衡問題的關(guān)鍵。本文提出的混合灰狼算法采用隨機鍵編碼方式對種群個體進行編碼,解碼中,考慮工序間的優(yōu)先關(guān)系約束和節(jié)拍約束,將工序和機器人分配到工位,計算灰狼的適應(yīng)度函數(shù)值(能耗值)。算法基于灰狼個體間的社會等級信息,選擇出3只最優(yōu)狼指引剩余個體進化,防止算法陷入局部最優(yōu),以實現(xiàn)種群的更新。最后,算法采用交叉算子,以實現(xiàn)種群間的信息交流。
2.1 編碼和解碼
機器人U型裝配線涉及工序和機器人的分配[13?15],因此,種群初始化時,其編碼主要包含兩部分:工序編碼和機器人編碼。
工序編碼采用隨機鍵編碼方式,以實現(xiàn)連續(xù)問題到離散問題的轉(zhuǎn)換。該編碼包含N個要素,每一個要素為0、1之間的隨機數(shù),且每一位置的隨機數(shù)表示對應(yīng)工序的權(quán)值。當(dāng)從可選工序集中選擇工序進行分配時,權(quán)值最大的工序被挑選出來。可選工序集包含兩部分:入口線可選工序集和出口線可選工序集。依據(jù)影子優(yōu)先約束關(guān)系,若工序的所有直接前序工序已分配,則該工序進入入口線可選工序集;若工序的所有直接后續(xù)工序已分配,則進入出口線可選工序集。
如圖3所示,某一灰狼的工序權(quán)值編碼為{0.910 1,0.854 2,0.321 5,0.120 3,0.146 5,0.652 4,0.854 1,0.941 2,0.215 3}。由影子優(yōu)先約束關(guān)系圖(圖1)可知,初始入口線可選工序集為{1},出口線可選工序集為{7,9},則可選工序集中具有最大權(quán)值0.910 1的工序1被挑選出,存放到工序分配序列第一個位置,且被分配到入口線。由于工序1已被分配,則工序1從可選工序集中剔除,且此時工序2、3、4的所有直接前序工序1已被分配,則工序2、3、4進入入口線可選工序集。更新后,入口線可選工序集為{2,3,4},出口線可選工序集為{7,9}。第二次選擇時,可選工序集中具有最大權(quán)值0.852 4的工序2存放到工序分配序列第二個位置,且被分配到入口線。以此類推,直到所有的工序存放到工序分配序列。機器人編碼中,編碼長度等于工位的數(shù)量且每一要素表示機器人代號。
上述工序編碼和機器編碼僅僅得到工序分配順序和機器人分配情況,而解碼方式則是進一步獲取工序分配到工位情況以及獲取適應(yīng)度函數(shù)值。具體步驟如下:
(1)初始節(jié)拍值為

令當(dāng)前節(jié)拍C=C0,工作站序號j=1;
(2)按照工序分配序列,將工序i分配到工作站j中,若分配后的工作站裝配時間大于節(jié)拍C,則工作站序號j←j+1,將工序i重新分配到工作站j;
(3)重復(fù)步驟(2),直至工序全部分配;
(4)若工作站數(shù)量大于m,則令C←C+1,轉(zhuǎn)步驟(2);
(5)計算能耗值。
2.2 進化機制
根據(jù)原始灰狼算法包圍獵物的原理,利用適應(yīng)度函數(shù)最佳的3只灰狼α、β和δ引導(dǎo)其余灰狼ω包圍獵物,實現(xiàn)位置的更新。
2.3 交叉算子
原始灰狼算法只有最佳的3只灰狼α、β、δ與其余灰狼ω存在信息交流,最低等級的灰狼ω之間無信息交流。因此,為增強灰狼間的信息交流,該算法分別針對工序編碼和機器人編碼,提出兩種交叉方式:雙點工序交叉和單點機器人交叉。具體交叉方式如圖4、圖5所示。
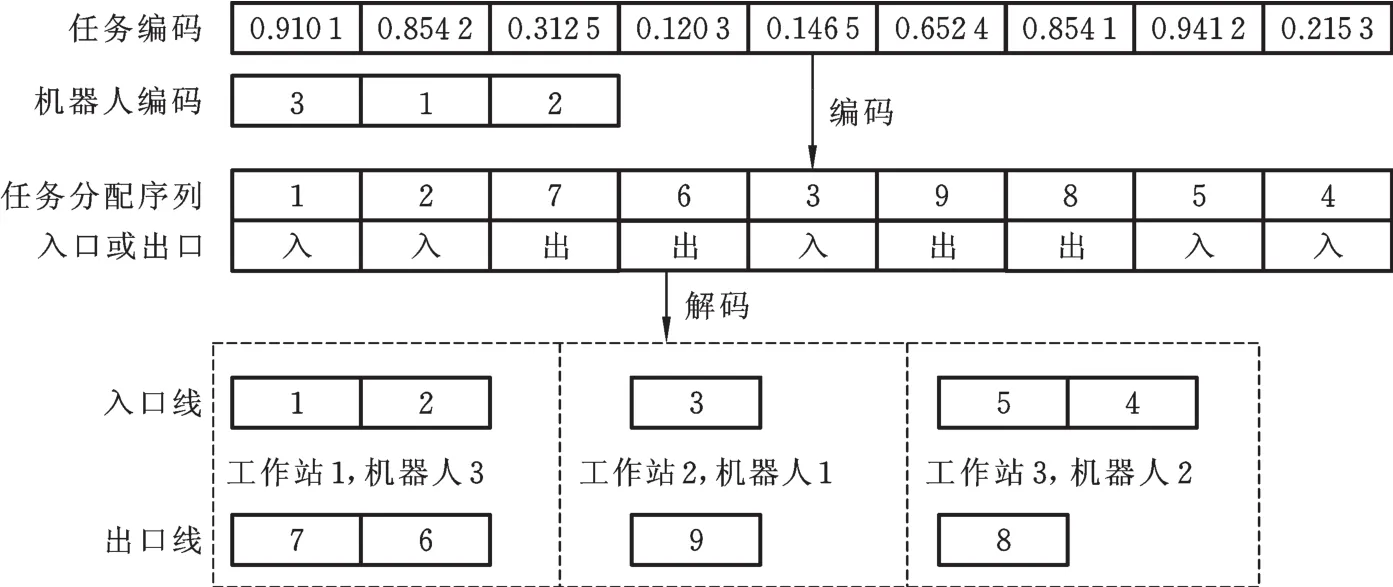
圖3 編碼和解碼Fig.3 Encode and decode
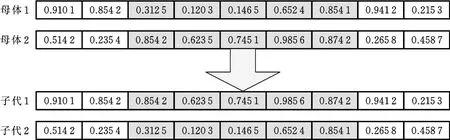
圖4 雙點工序交叉Fig.4 Two-point task crossover
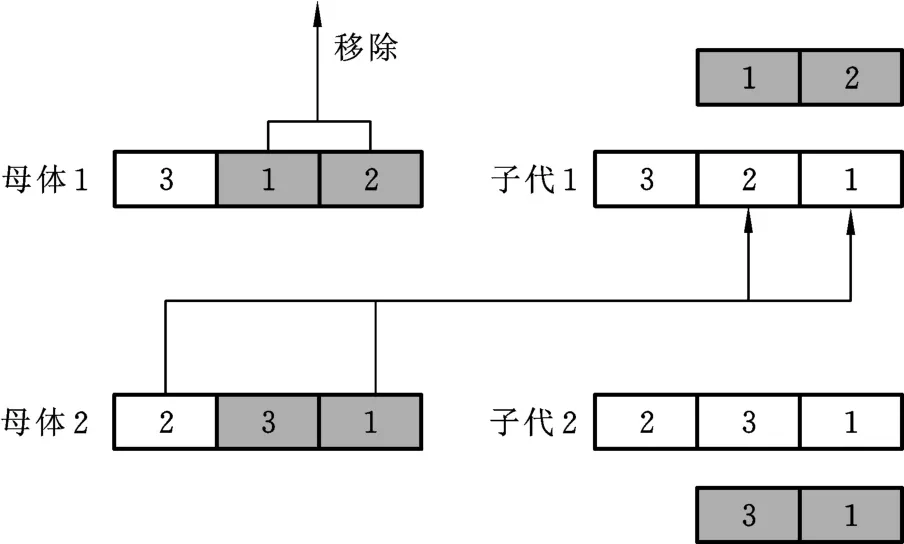
圖5 單點機器人交叉Fig.5 Single-poin t robot crossover
混合灰狼算法的流程如圖6所示。
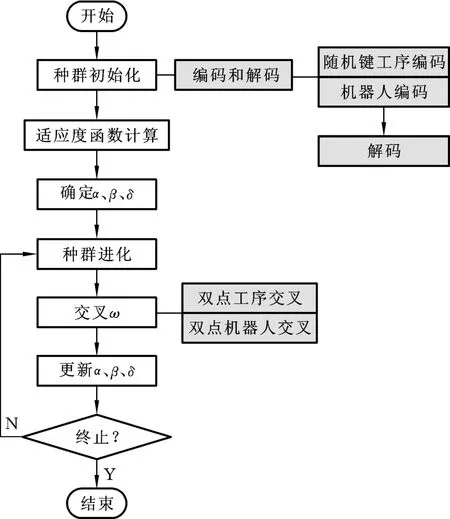
圖6 混合灰狼算法流程Fig.6 Flow chart of hybrid grey wolf op tim ization
3 實驗結(jié)果與分析
為驗證HGWO算法的性能,將HGWO算法與GWO算法進行對比。兩種算法都采用C語言進行編程,并在同一臺電腦上運行,電腦配置為:Intel Core i5 CPU,2.80 GHz and 2.00 GB RAM。實驗案例選取大規(guī)模U型裝配線標(biāo)桿案例:A rcus111,Barthol148和Scholl297。3個案例的工序數(shù)n分別為111、148、297。且每個案例分別設(shè)置4種規(guī)模的工作站數(shù)量:A rcus111中,m=9,13,17,22;Barthol148中,m=10,14,21,29;Scholl297中,m=19,29,38,50。機器人的數(shù)量r等于工作站的數(shù)量。案例的優(yōu)先關(guān)系和裝配時間來自專業(yè)裝配線網(wǎng)站https://assembly?line?balancing.de/。工序在不同機器人上的加工時間在[0.8ti,1.2ti]中隨機生成(ti為工序 i的裝配時間),單元能耗值在[0.2,3.0]中隨機生成[12]。算法終止條件設(shè)置為運行時間n×n×10和n×n×20。
算法對比前,采用M initab中的田口實驗對算法進行參數(shù)校驗,得出最佳參數(shù)組合。HGWO最佳參數(shù)組合為:種群規(guī)模40,交叉概率0.7;GWO最佳參數(shù)組合為:種群規(guī)模40。
對比試驗中,每一個案例運行10次,獲取總能耗的最小值和平均值。表1、表2分別展示了2種終止條件下的對比結(jié)果。
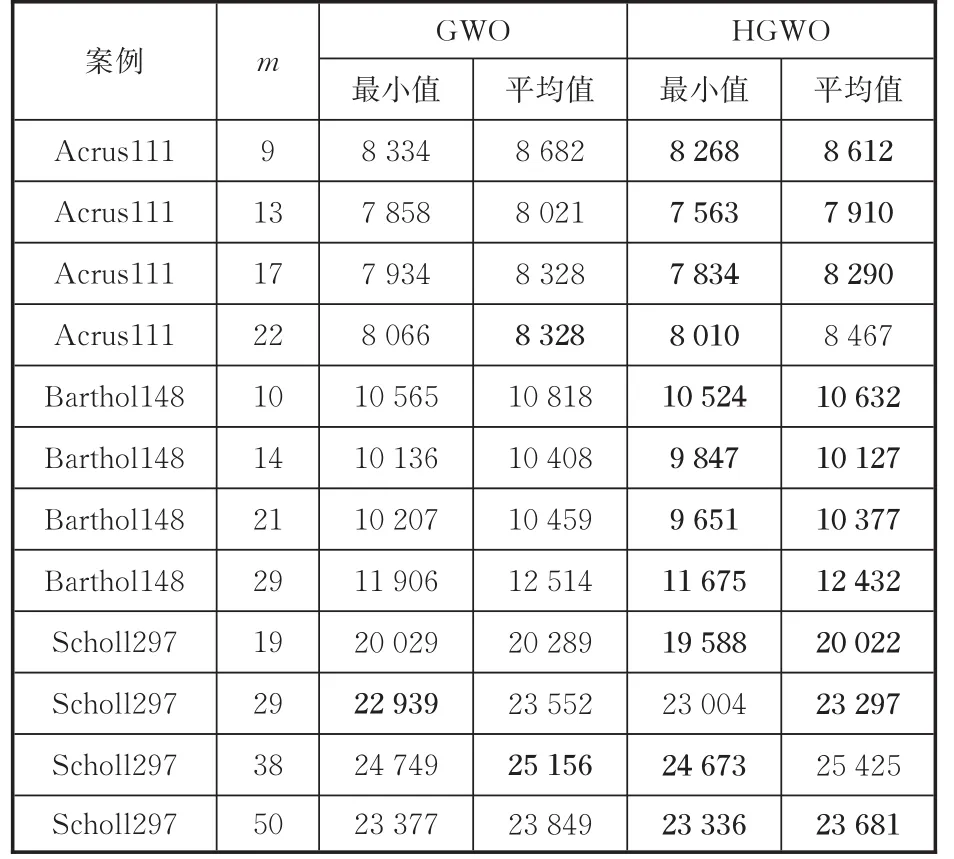
表1 終止條件為n×n×10的對比結(jié)果Tab.1 Com parative resu lts of term inal condition n×n×10
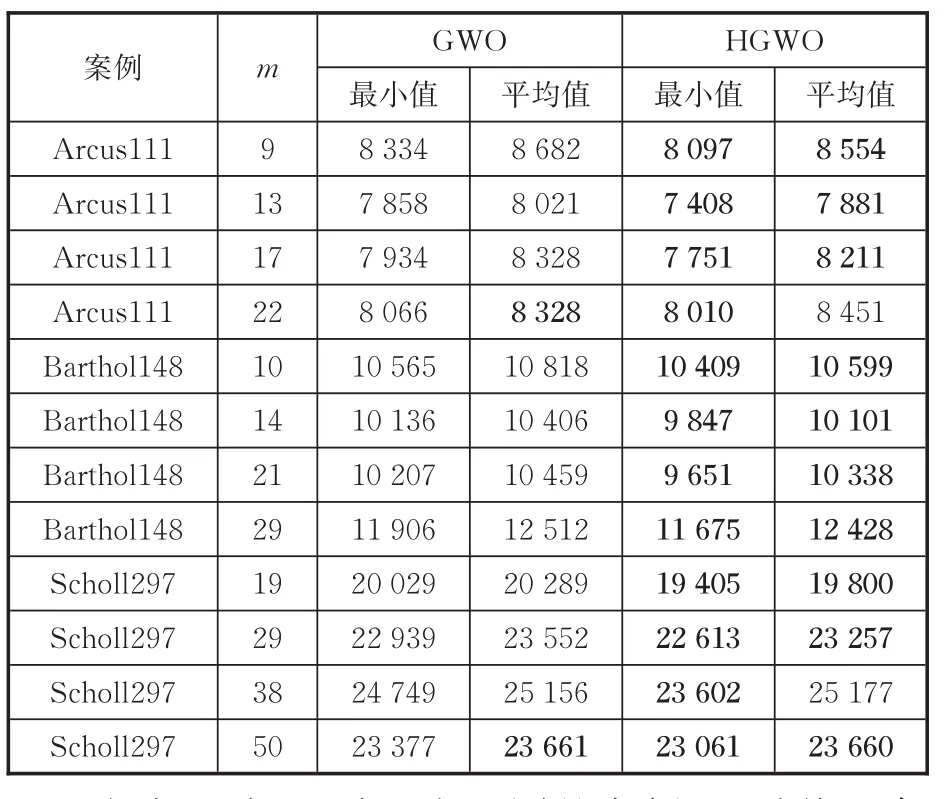
表2 終止條件為n×n×20的對比結(jié)果Tab.1 Com parative results of term inal condition n×n×20)
由表1、表2可知,在不同的案例,兩種終止條件下,HGWO所獲得能耗最小值和平均值基本都要小于GWO獲取的結(jié)果。從而證明了所提出的HGWO算法在求解機器人U型裝配線能耗優(yōu)化問題時具有顯著的優(yōu)越性。
圖7為HGWO算法求解A rcus111問題的收斂圖,即能耗隨迭代次數(shù)的變化曲線。由圖7可知,在算法運行到70代左右時,算法收斂很快;70~308代時,算法收斂變慢,但種群還在持續(xù)進化;308代之后,算法基本不再進化。這表明HGWO算法在求解該問題時具有較好的收斂性。
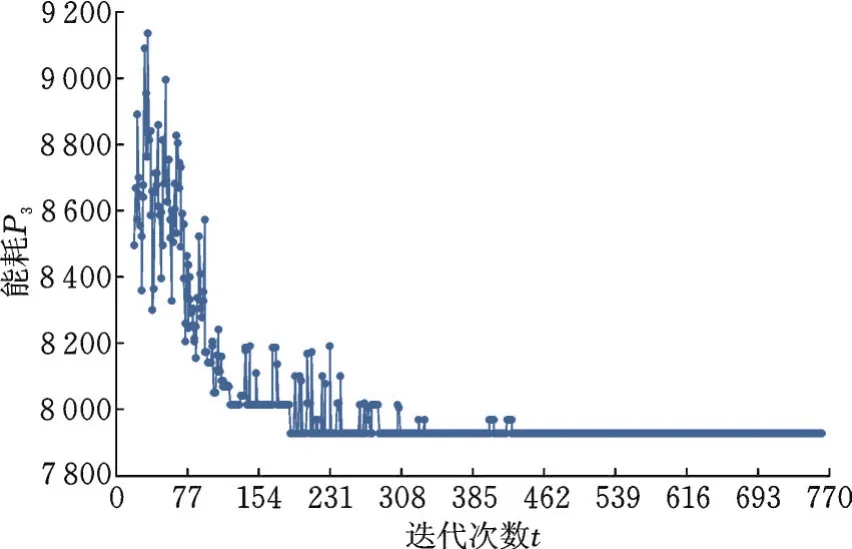
圖7 HGWO算法收斂圖Fig.7 Convergence of HGWO algorithm
為分析能耗的降低是否會影響裝配線常規(guī)目標(biāo)——節(jié)拍值,本文分析了不同方案的工序分配、機器人分配和目標(biāo)值。表4展示了兩種方案的工序和機器人布局,以及節(jié)拍值和能耗值。所分析的案例為A rcus111標(biāo)桿案例,工序數(shù)為111,工作站和機器人數(shù)為9。方案1為HGWO算法的第一代最優(yōu)解的分配方案,方案2為算法優(yōu)化后,得到的最優(yōu)解的分配方案。由表4可知,由于方案1中工序分配很不均勻,其最終的節(jié)拍值和能耗都很大,分別為755和9 252.28。方案2工序分配比較均勻,每個工作站的工序數(shù)量都在13左右,且節(jié)拍值和能耗都要小于方案1,分別為709和8 756.12。由此可以發(fā)現(xiàn),在算法優(yōu)化能耗的同時,節(jié)拍值也在逐漸減小,表明能耗的降低也會影響裝配線的傳統(tǒng)目標(biāo)——節(jié)拍。因此,在實際裝配線布局時,企業(yè)可以以能耗為目標(biāo),來平衡裝配線的生產(chǎn)負(fù)載。這樣既可以達(dá)到負(fù)載均衡的目的,也能降低企業(yè)的生產(chǎn)能耗。
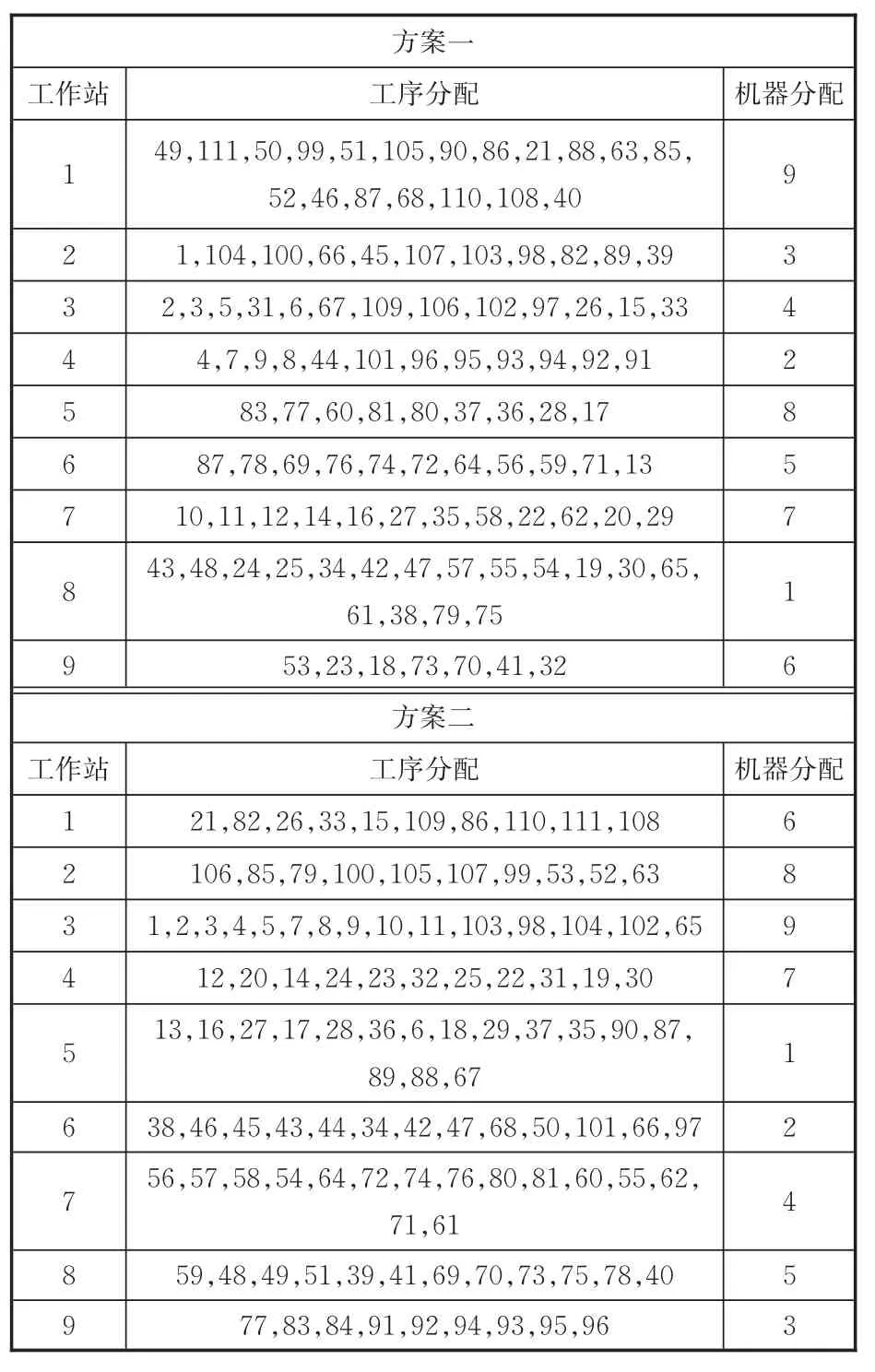
表4 能耗節(jié)能方案對比表Tab.4 Com parative results of the energy consum p tion p lans
4 結(jié)語
針對當(dāng)前逐漸推廣的機器人U型裝配線問題,本文以能耗為優(yōu)化目標(biāo),介紹了機器人U型裝配線平衡問題,并采用混合灰狼算法求解了該問題。算法采用隨機鍵編碼方式實現(xiàn)工序編碼,將連續(xù)問題離散化。針對問題中的工序分配和機器人分配,引入兩種交叉算子,實現(xiàn)算法中最低等級灰狼之間的信息交流。通過與原始灰狼算法的對比,驗證了混合灰狼算法性能的可行性和有效性。在未來的研究中,可以將生產(chǎn)中的負(fù)載問題與能耗問題進行協(xié)同優(yōu)化。
猜你喜歡
天水行政學(xué)院學(xué)報(2022年4期)2022-11-18 09:02:36
艦船科學(xué)技術(shù)(2022年13期)2022-08-11 09:30:02
鐵道通信信號(2020年9期)2020-02-06 09:15:22
漢語世界(The World of Chinese)(2019年3期)2019-07-01 02:37:48
數(shù)學(xué)大王·趣味邏輯(2019年5期)2019-06-13 20:27:43
小學(xué)科學(xué)(學(xué)生版)(2019年5期)2019-05-21 01:00:18
中學(xué)生數(shù)理化·中考版(2018年10期)2018-12-07 00:44:52
經(jīng)濟技術(shù)協(xié)作信息(2018年30期)2018-11-22 06:20:24
中央社會主義學(xué)院學(xué)報(2017年1期)2017-04-16 05:34:07
中國衛(wèi)生(2014年12期)2014-11-12 13:12:40