基于艦船運動預測的無人機著艦航向指令修正方法
2018-09-10 18:25:44華藝欣肖奔
航空科學技術 2018年11期
華藝欣 肖奔
摘要:本文提出一種基于艦船運動預測的無人機航向指令修正方法,以實時估算艦船所遭遇海浪的幅值與頻率,在線預計艦船運動為基礎,預測著艦時的艦船狀態信息,并利用這些信息生成無人機的航向與航跡角修正指令,以使著艦時無人機與理想著艦點之間的偏差最小。最后利用該方法給出了典型艦船動態特性的高精度仿真結果。
關鍵詞:自主著艦系統,艦船運動預測;實時估算;指令修正;理想觸艦點
中圖分類號:V429 文獻標識碼:A
在自主著艦的過程中,由于理想著艦點、進艦速度、航向和俯仰姿態等有嚴格限制,艦載無人機自主著艦具有極大的難度。若要在陣風擾動、通信丟失、高海況、艦船運動等情況下實現準確著艦,則面臨更大的挑戰[1]。為了解決這些問題,本文提出了一種基于艦船運動預測的無人機航向指令修正方法,包括艦船運動實時預測和決定無人機著艦最優軌跡的算法,主要目標是利用著艦前los預測的艦船狀態,來修正無人機著艦階段航向與航跡角等。
假定滿足如下要求[2]:(1)算法對中等以下海況有效;(2)艦船轉彎運動速率不大于0.5(°)/s;(3)飛控系統具有抗風擾著艦能力,艦船甲板風影響可以忽略;(4)算法需要利用船體軸系下含有當前艦船姿態、速率和加速度信號,在距艦船18km范圍內可以獲取這些信號,并按20Hz頻率接收;(5)在這些信號瞬時丟失時,艦船運動預測模型是穩定的。
1 艦船運動實時預測
1.1 頻率估算
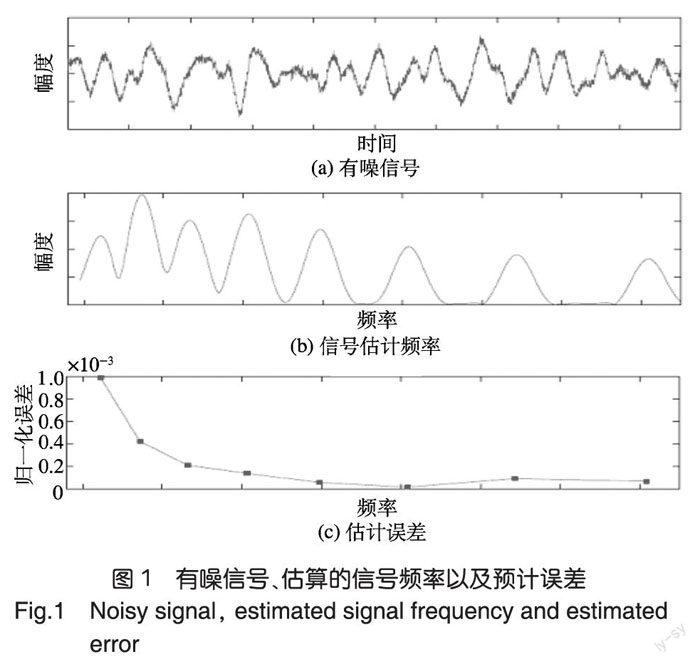
要得到準確的艦船運動預計模型,就必須準確估算海浪頻率。由于從開始進場到著艦有相對較長的時間段,所以可以采用傅里葉變換估算波浪頻率。傅里葉變換(FFT)廣泛用于有噪信號的多頻率估算。圖1給出了從有噪信號(如圖1(a)所示)中獲取的波浪頻率(如圖1(b)所示),頻率估算誤差如圖1(c)所示。由圖1可知,FFT可得到精確的頻率估算。
1.2 幅值估算
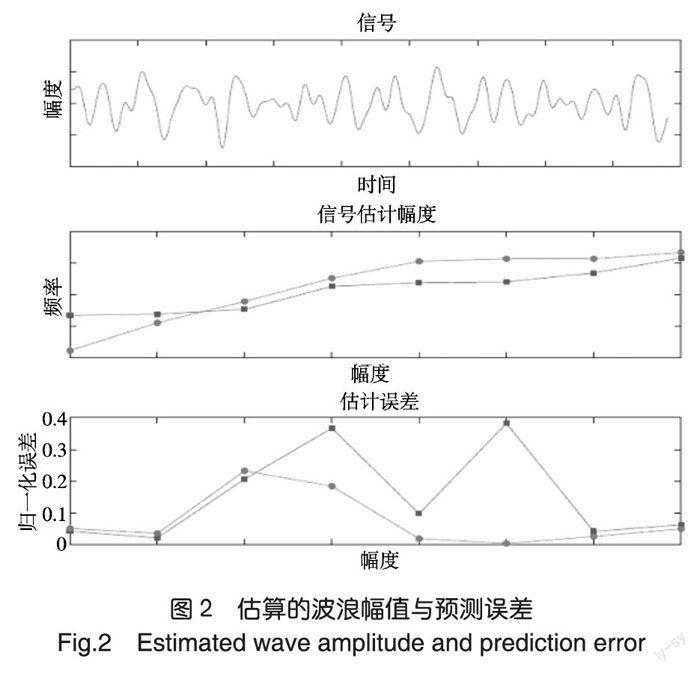
一旦頻率已知,波浪模型的幅值等參數變為線性,許多參數估算技術可以用來估算幅值。這里選擇最小二乘算法,因為其精度高,運算簡便。估算結果如圖2所示。
2 相對船體軌跡的優化算法
這種優化算法的主要目標是利用艦船運動模型來預測并修正著艦參數從而得到甲板運動。在此基礎上還可以修正對準跑道的中心線、下滑道、俯仰角等來獲得著艦點在漂移限制范圍內的精確著陸。最終目標是獲取艦載機進艦著艦的最優軌跡。
設計算法時假定以下條件成立:
(1)在進艦過程的最后20s內,艦船運動盡可能穩定;
(2)對于相同的艦船運動和引言規定的海況,算法有效;
(3)若著艦之前的 5s內艦船數據鏈中斷后,飛機繼續進艦和逃逸時,算法有效。
甲板運動時的下滑道與對中修正示意圖如圖3所示。逃逸時,指令發生器產生期望的速度(全加力)和對中,以便安全復飛。
3 無人機理想運動模型
與陸基飛機著陸不同,艦載機著艦下滑不經過平飄,而是沿一特定軌道進行帶動力勻速直線下滑[3,4]。假定無人機以相對艦船的恒定速度v*進艦,則無人機相對斜角甲板坐標系的理想位置定義如下:式中:xca為艦船位置,d為無人機與艦船之間的初始距離。
由式(1)~式(3)可以得到無人機的理想速度:
同樣,由式(4)~式(6)可以得到無人機的理想加速度:
4 用于艦船運動補償的角度修正
下面分析用于艦船運動補償的無人機控制系統[5]。
由于艦船升沉、縱搖和橫搖運動,著艦點的實際位置Xca,yca和zca不同于理想位置。補償這一誤差可以分為兩部分:飛行航跡角修正和無人機最終著陸階段的航向修正。在著艦前10s執行修正。z軸方程形式如下:式中:tF為理想著艦時刻。
著艦時的理想z值為:
將艦船升沉、橫搖和縱搖運動導致著艦點z向坐標的復合擾動標注為△ZN。航跡角補償中各變量關系如圖4所示。
圖4中,dN=10v*,據此則有:
式(7)~式(10)忽略了實際著艦與理想著艦之間的時差影響。假如時差大,可用迭代方法計算著艦時刻tF的實際著艦點。
5 仿真結果
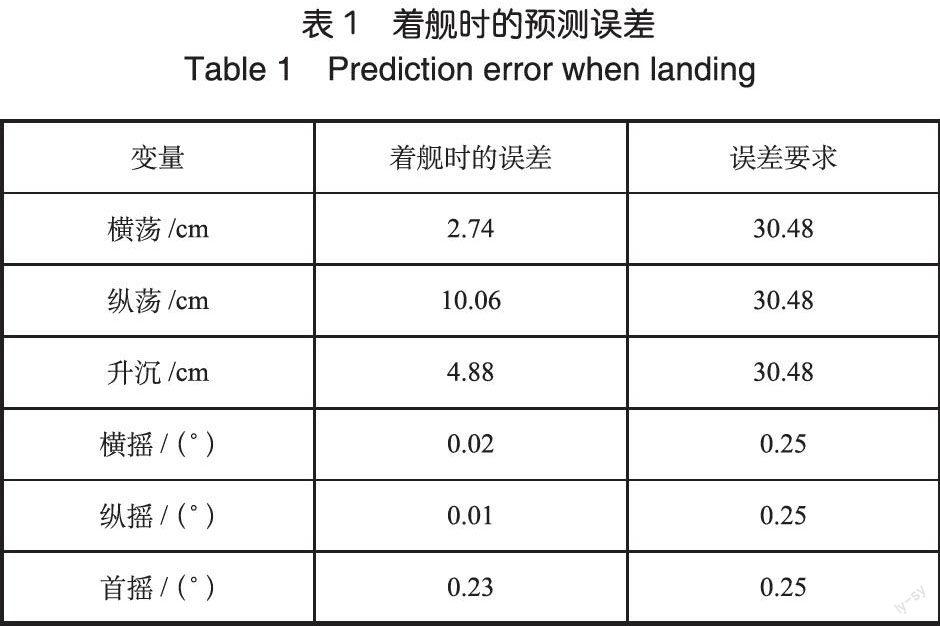
仿真由高逼真度的艦船動力學模型和8個不同頻率正弦函數疊加的海浪動力學模型組成。海浪運動影響艦船的縱搖、升沉和橫搖運動及其速率,滾轉、俯仰和偏航及其速率。由圖5可知,根據艦船運動預測能準確估算所有變量(實線為實際變量,虛線為預測變量)。為驗證預測能力,將著艦前的最后10s曲線放大,如圖6所示(實線為實際變量,虛線為預測變量)。可以看到10s內的所有變化均可準確預測出來,并且確保誤差均在要求范圍內。著艦時的預測誤差及誤差要求見表1,由表可知預測誤差滿足要求。
6 結束語
為了讓艦載無人機在各種不利條件下實現準確著艦,本文提出了基于艦船運動預測的無人機航向指令修正方法,包括艦船運動實時預測和決定無人機著艦最優軌跡的算法,主要目標是利用著艦前los預計的艦船狀態來修正無人機著艦階段航向與航跡角等。仿真結果表明,艦船運動實時預測可以準確估算所有變量,從而對著艦引導系統的設計及工程實現有實際的應用參考價值。
參考文獻
[1]楊一棟,余俊雅.艦載機著艦引導與控制[M].北京:國防工業出版社,2007.
[2]張明廉,徐軍.艦載飛機自動著艦系統的研究[J].北京航空航天大學學報,1994,20(4):386-391.
[3]周自全,張子彥.飛行品質和飛行安全[J].飛行力學2009,27(2):1-6.
[4]羅先震,金長江.艦載飛機著艦下滑軌跡控制與分析[J].飛行力學,1993(3):34-44.
[5]Jovan B,Joshua R.An autonomous carrier landing system forunmannned aerial vehicles[C]//AIAA Guidance,Navigation,and Control Conference,2009.