一種基于相位差濾波過(guò)程的新型連續(xù)相位板設(shè)計(jì)方法
2018-09-12 10:17:14李福建
科技視界 2018年13期
李福建
【摘 要】連續(xù)相位板是高強(qiáng)度激光系統(tǒng)束勻滑技術(shù)中的關(guān)鍵一環(huán),其作用是改變激光聚焦焦斑的形態(tài)。基于Gerchberg-Saxton算法,本文提出了一種新的連續(xù)相位板設(shè)計(jì)方法,通過(guò)對(duì)相位差進(jìn)行濾波,避免了傳統(tǒng)設(shè)計(jì)方法中遠(yuǎn)場(chǎng)緩變的要求及復(fù)雜的解相過(guò)程,從而達(dá)到節(jié)約計(jì)算時(shí)間,簡(jiǎn)化編程的目的。同時(shí)通過(guò)控制相位差濾波參數(shù),能夠?qū)λO(shè)計(jì)的連續(xù)相位板形態(tài)進(jìn)行一定調(diào)控。
【關(guān)鍵詞】束勻滑技術(shù);連續(xù)相位板設(shè)計(jì);G-S算法
中圖分類號(hào): P228.4 文獻(xiàn)標(biāo)識(shí)碼: A 文章編號(hào): 2095-2457(2018)13-0001-002
DOI:10.19694/j.cnki.issn2095-2457.2018.13.001
1 相位板設(shè)計(jì)簡(jiǎn)介
受控核聚變是人類解決能源問(wèn)題的一大方向。為了利用聚變能,人們?cè)O(shè)計(jì)了不同類型的聚變裝置,其中慣性約束核聚變由于其技術(shù)的可行性,一直被寄予重望。在激光驅(qū)動(dòng)的慣性約束核聚變裝置中,束勻滑裝置必不可少。束勻滑技術(shù)是實(shí)現(xiàn)聚變?nèi)剂蟽?nèi)爆過(guò)程的關(guān)鍵之一,對(duì)于控制激光等離子體作用影響很大。而束勻滑技術(shù)中,相位板的使用是焦斑形態(tài)的關(guān)鍵。相位板用于改變焦斑形態(tài),自從隨機(jī)相位板整型方法由Kato于1983年提出[1],相位板便被廣泛應(yīng)用于高強(qiáng)激光器中。而后人們又提出了相息相位板,連續(xù)相位板。根據(jù)光束傳播的菲涅爾衍射理論,對(duì)于波長(zhǎng)的光,用k表示其波矢,入射光場(chǎng)U(ξ,η)傳播距離z后所得到的U(x, y)有如下表達(dá)式:
在經(jīng)過(guò)透鏡聚焦的情況下,有:
焦斑與入射場(chǎng)間通過(guò)傅里葉變換聯(lián)系。所以在入射場(chǎng)函數(shù)U(ξ,η)上增加相位因子能改變焦斑形態(tài)。為了獲得特定形態(tài)的焦斑,相位板分布需特殊設(shè)計(jì)。G-S算法[2]因其快速便捷的特點(diǎn),被廣泛應(yīng)用,G-S算法由Gerchberg與Saxton于1972年提出。G-S算法設(shè)計(jì)獲得的相位板存在不連續(xù)線,不連續(xù)線兩邊相位相差2。不連續(xù)線可以分為開(kāi)環(huán)與閉環(huán)兩種,閉環(huán)來(lái)自于算法中取相位值的步驟,可通過(guò)解相消除。而開(kāi)環(huán)來(lái)自于近場(chǎng)場(chǎng)強(qiáng)奇點(diǎn)[3],無(wú)法消除。在高強(qiáng)度激光裝置中,相位板的不連續(xù)點(diǎn)容易被高強(qiáng)激光損壞,同時(shí)不連續(xù)的邊緣也會(huì)將小部分光折射至大角度,從而損失能量。連續(xù)相位板由Lin.Y于1996年提出[4],連續(xù)相位板(continuous phase plate,CPP)的使用避免了不連續(xù)結(jié)構(gòu),從而增大了能量利用率,延長(zhǎng)了器件使用壽命。為了獲得連續(xù)相位板,人們提出了一些相應(yīng)的設(shè)計(jì)方法然而這些方法往往包括繁雜的解相位過(guò)程,效率較低。
2 相位差濾波CPP設(shè)計(jì)方法
2.1 相位差濾波CPP設(shè)計(jì)方法簡(jiǎn)介
相位差濾波CPP設(shè)計(jì)方法是一種新的改進(jìn)G-S算法,與傳統(tǒng)CPP算法相比,相位差濾波算法將濾波過(guò)程加在相位差上而不是相位上,由此避免了對(duì)相位濾波導(dǎo)致的相位分布大幅度變化,從而更容易達(dá)到收斂。給定入射場(chǎng)Ein,目標(biāo)場(chǎng)Eout,其過(guò)程如下:
1.生成連續(xù)相位作為近場(chǎng)相位分布?漬1。其生成方法為對(duì)隨機(jī)矩陣以寬度D1濾波后乘以幅度常數(shù)A1。
2.對(duì)近場(chǎng)分布Enf=Ein*exp(i*?漬1)作傅里葉變換,獲得遠(yuǎn)場(chǎng)分布Eff。
3.對(duì)Eff卷積獲得遠(yuǎn)場(chǎng)分布包絡(luò)Eev。
4.通過(guò)比較遠(yuǎn)場(chǎng)包絡(luò)與目標(biāo)場(chǎng)分布,獲得變換矩陣T=Eout/Eev。
5.在T上進(jìn)行寬度為DT的濾波過(guò)程。
6.將T作用在遠(yuǎn)場(chǎng)分布Eff上,得到新的遠(yuǎn)場(chǎng)分布E。
7.對(duì)Eff作逆傅里葉變換,獲得近場(chǎng)分布Enf。
8.取Enf的相位分布?漬2,求出在0-2?仔范圍內(nèi)的相位差?漬d=?漬2-?漬1。
9.對(duì)?漬d進(jìn)行寬度為Dd的濾波得到?漬d,獲得新的近場(chǎng)相位分布?漬1=?漬1+?漬d。
10.比較遠(yuǎn)場(chǎng)Eff與目標(biāo)場(chǎng)Eout,如果遠(yuǎn)場(chǎng)沒(méi)達(dá)到要求且迭代次數(shù)沒(méi)達(dá)到限制次數(shù),重復(fù)2-9步驟;反之,結(jié)束迭代,取?漬1為設(shè)計(jì)結(jié)果。
為了使用相位差濾波算法設(shè)計(jì)CPP,需要確定的參數(shù)有:Ein,Eout,D1,A1,DT,Dd。根據(jù)G-S算法的研究結(jié)果,A1選取為6?仔是合適的,所以固定A1為6?仔,選取Ein為充滿采樣區(qū)域的平面波,目標(biāo)場(chǎng)為8階超高斯分布,寬度為半采樣寬度。
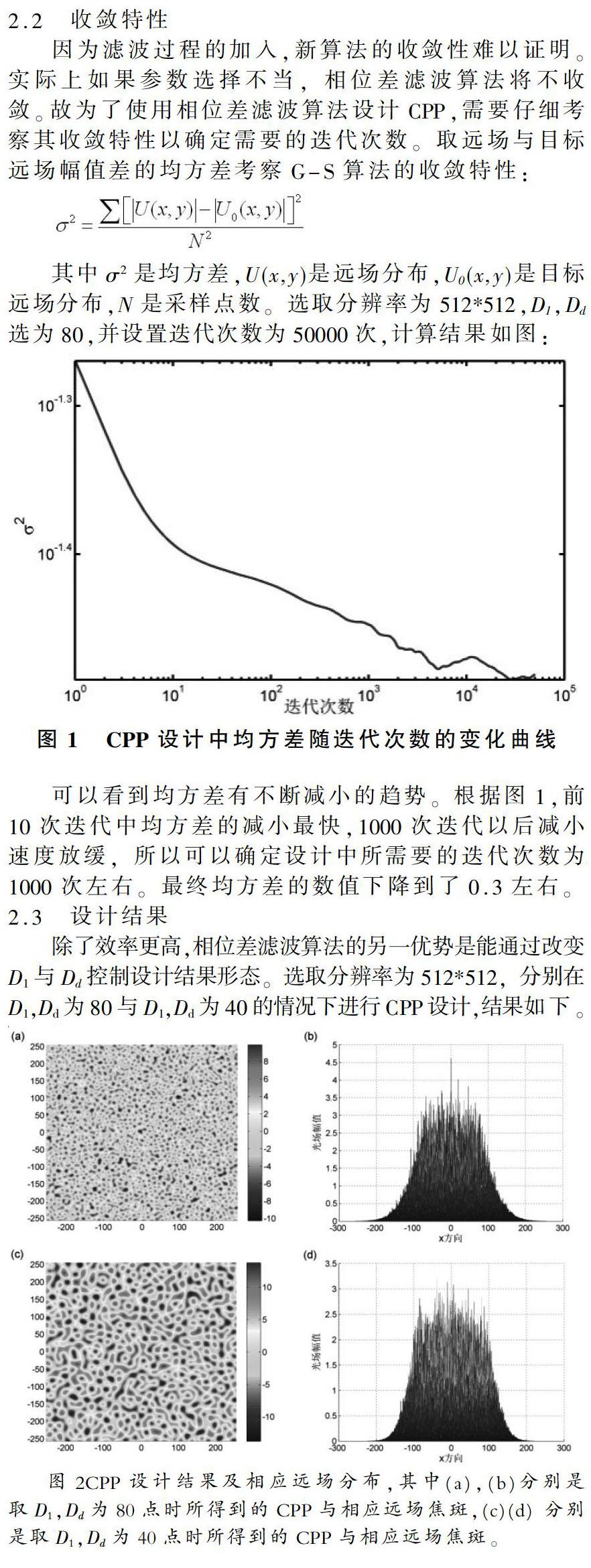
2.2 收斂特性
因?yàn)闉V波過(guò)程的加入,新算法的收斂性難以證明。實(shí)際上如果參數(shù)選擇不當(dāng),相位差濾波算法將不收斂。故為了使用相位差濾波算法設(shè)計(jì)CPP,需要仔細(xì)考察其收斂特性以確定需要的迭代次數(shù)。取遠(yuǎn)場(chǎng)與目標(biāo)遠(yuǎn)場(chǎng)幅值差的均方差考察G-S算法的收斂特性:
可以看到均方差有不斷減小的趨勢(shì)。根據(jù)圖1,前10次迭代中均方差的減小最快,1000次迭代以后減小速度放緩,所以可以確定設(shè)計(jì)中所需要的迭代次數(shù)為1000次左右。最終均方差的數(shù)值下降到了0.3左右。
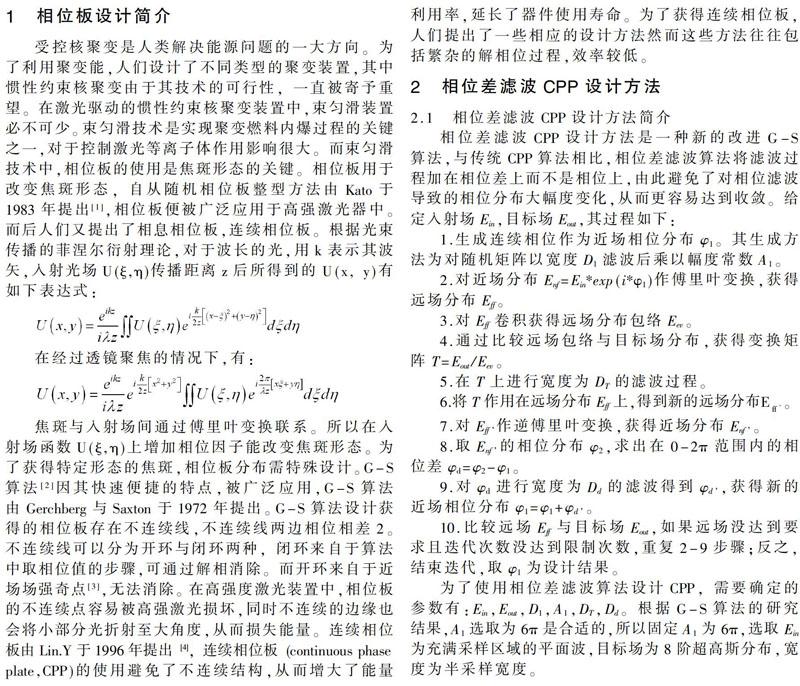
2.3 設(shè)計(jì)結(jié)果
除了效率更高,相位差濾波算法的另一優(yōu)勢(shì)是能通過(guò)改變D1與Dd控制設(shè)計(jì)結(jié)果形態(tài)。選取分辨率為512*512,分別在D1,Dd為80與D1,Dd為40的情況下進(jìn)行CPP設(shè)計(jì),結(jié)果如下。
圖2CPP設(shè)計(jì)結(jié)果及相應(yīng)遠(yuǎn)場(chǎng)分布,其中(a),(b)分別是取D1,Dd為80點(diǎn)時(shí)所得到的CPP與相應(yīng)遠(yuǎn)場(chǎng)焦斑,(c)(d)分別是取D1,Dd為40點(diǎn)時(shí)所得到的CPP與相應(yīng)遠(yuǎn)場(chǎng)焦斑。
可以看到新算法對(duì)相位分布形態(tài)控制的有效性:通過(guò)調(diào)整初始相位及濾波寬度,可以控制相位板的變化頻率。然而進(jìn)一步降低D1,Dd到10時(shí),遠(yuǎn)場(chǎng)分布與目標(biāo)分布出現(xiàn)了較大的偏差,存在明顯背景噪聲。此時(shí)獲得的CPP局部最大相位達(dá)到了40弧度。事實(shí)上濾波參數(shù)是不能隨意降低的,為了獲得目標(biāo)分布,光場(chǎng)必須具有一定空間頻率范圍,這可以通過(guò)不確定原理來(lái)理解:近場(chǎng)光場(chǎng)頻率的寬度與遠(yuǎn)場(chǎng)強(qiáng)度分布的寬度不能同時(shí)任意縮小,而CPP設(shè)計(jì)中,遠(yuǎn)場(chǎng)強(qiáng)度分布寬度是確定的,所以必然存在一個(gè)近場(chǎng)光場(chǎng)頻率寬度的最小值,如果選擇濾波參數(shù)小于此數(shù)值,設(shè)計(jì)結(jié)果必然出現(xiàn)背景噪聲以擴(kuò)大遠(yuǎn)場(chǎng)強(qiáng)度分布寬度。
3 結(jié)論
本文提出了一種相位差濾波算法,用于設(shè)計(jì)高強(qiáng)激光系統(tǒng)中光束整形使用的連續(xù)相位板。這種新方法由于避免了傳統(tǒng)算法中復(fù)雜的解相過(guò)程而有著較高的效率。同時(shí)可以通過(guò)選擇不同的濾波參數(shù)直接對(duì)設(shè)計(jì)的CPP形態(tài)進(jìn)行控制。計(jì)算結(jié)果顯示,此算法設(shè)計(jì)的相位板遠(yuǎn)場(chǎng)形態(tài)與目標(biāo)函數(shù)接近,沒(méi)有背景噪聲,達(dá)到了焦斑整形的要求。
【參考文獻(xiàn)】
[1]Y.Kato,K.Mima,N.Miyanaga,S.Arinaga,Y.Kitagawa,M.Nakatsuka,and C.Yamanaka, "Random Phasing of High-Power Lasers for Uniform Target Acceleration and Plasma-Instability Suppression,"Physical Review Letters 53,1057-1060(1984).
[2]R.W.Gerchberg,"A practical algorithm for the determination of phase from image and diffraction plane pictures,"Optik 35, 237-250(1972).
[3]H.Aagedal,M.Schmid,T.Beth,S.Teiwes,and F.Wyrowski,"Theory of speckles in diffractive optics and its application to beam shaping,"Journal of Modern Optics 43,1409-1421 (1996).
[4]Y.Lin,T.J.Kessler,and G.N.Lawrence,"Design of continuous surface-relief phase plates by surface-based simulated annealing to achieve control of focal-plane irradiance,"Opt.Lett.21,1703-1705(1996).
[5]S.Wen,J.Hou,C.Yang,H.Yan,Q.Shi,and L.Zhou,"Design and Fabrication of Large-Aperture Continuous Phase Plates for Back Lighting,"Laser & Optoelectronics Progress 48,052201-052201-052201-052205(2011).
