基于差速驅(qū)動(dòng)的AGV驅(qū)動(dòng)單元分析與改進(jìn)設(shè)計(jì)
2018-09-13 09:02:34趙華東雷超帆
鄭州大學(xué)學(xué)報(bào)(工學(xué)版) 2018年5期
關(guān)鍵詞:結(jié)構(gòu)分析
趙華東, 江 南, 雷超帆
(鄭州大學(xué) 機(jī)械工程學(xué)院, 河南 鄭州 450001)
0 引言
隨著我國(guó)人工成本的逐漸升高,對(duì)產(chǎn)品質(zhì)量,自動(dòng)化、柔性生產(chǎn)的要求提高,商用自動(dòng)導(dǎo)引車(chē)(AGV)[1]作為智能制造和柔性生產(chǎn)的關(guān)鍵環(huán)節(jié),因其能實(shí)現(xiàn)高效、經(jīng)濟(jì)、靈活的無(wú)人化生產(chǎn),廣泛應(yīng)用于工廠(chǎng)自動(dòng)化生產(chǎn)線(xiàn)、倉(cāng)儲(chǔ)物流、機(jī)場(chǎng)和港口的物料傳送[2-3].
近年來(lái),國(guó)內(nèi)外研究人員對(duì)AGV的結(jié)構(gòu)和運(yùn)動(dòng)進(jìn)行了大量的研究.王殿君等通過(guò)四輪差速原理,運(yùn)用ADAMS軟件分析了AGV轉(zhuǎn)彎過(guò)程[4].劉國(guó)剛通過(guò)ANSYS仿真,對(duì)AGV車(chē)架進(jìn)行了輕量化設(shè)計(jì)[5].夏田等通過(guò)建立AGV的靜力學(xué)和動(dòng)力學(xué)模型,采用Matlab/Simulink建立了仿真模型并仿真了一個(gè)驅(qū)動(dòng)輪靜止另一個(gè)轉(zhuǎn)動(dòng)的運(yùn)動(dòng)方式[6].劉治華等通過(guò)疲勞理論,采用ADAMS和NCODE分別對(duì)軌道車(chē)飛碟游樂(lè)設(shè)備的驅(qū)動(dòng)軸進(jìn)行了動(dòng)力學(xué)和疲勞仿真分析,并得出驅(qū)動(dòng)軸的壽命云圖[7].
筆者以某公司設(shè)計(jì)的一款懸臂結(jié)構(gòu)、鏈傳動(dòng)的AGV為例,研究驅(qū)動(dòng)輪“外掰”和啟停“沖擊”的問(wèn)題.該AGV的工況為:8小時(shí)工作制,用于軸承內(nèi)外圈自動(dòng)化生產(chǎn)線(xiàn)上將碼垛完成后的軸承內(nèi)外圈及托盤(pán),轉(zhuǎn)移到智能倉(cāng)儲(chǔ)的對(duì)應(yīng)入口處,然后返回等待托盤(pán)再次裝滿(mǎn),如此往復(fù).其中軸承內(nèi)外圈及托盤(pán)總重量為168 kg.AGV平均循環(huán)周期為42 min.工廠(chǎng)路面為環(huán)氧地坪漆.筆者通過(guò)反復(fù)試驗(yàn)和建模仿真分析的方法,確定了“外掰”及“沖擊”的原因,提出了一種新的結(jié)構(gòu),且對(duì)新機(jī)構(gòu)進(jìn)行了校核.從結(jié)構(gòu)應(yīng)力,傳動(dòng)效率和精度上進(jìn)行對(duì)比分析,驗(yàn)證了新機(jī)構(gòu)的合理性.
1 問(wèn)題分析
1.1 結(jié)構(gòu)與現(xiàn)象描述
該AGV車(chē)身長(zhǎng)600 mm,寬500 mm,高300 mm,為差速驅(qū)動(dòng)、六輪布局形式,結(jié)構(gòu)如圖1所示.

圖1 AGV整體結(jié)構(gòu)圖Fig.1 The whole structure of AGV
小車(chē)車(chē)體總質(zhì)量為57.15 kg,最大載重量為200 kg,驅(qū)動(dòng)單元部分質(zhì)量為24.34 kg,最大運(yùn)行坡度5°,最大運(yùn)行速度1 m/s,運(yùn)行方向?yàn)殡p向.小車(chē)車(chē)身與從動(dòng)輪直接連接,和驅(qū)動(dòng)單元通過(guò)彈簧和導(dǎo)軌滑塊連接在一起.這樣驅(qū)動(dòng)輪始終著地,防止因制造誤差或地面不平坦導(dǎo)致打滑,造成小車(chē)運(yùn)動(dòng)失真,且有減震[8]的作用.
由于A(yíng)GV小車(chē)殼體側(cè)面板不可拆卸,故將AGV小車(chē)空載置于高于地面的平臺(tái)上,在車(chē)輪外側(cè)面與地面處固定一角尺作為參照標(biāo)尺.然后在A(yíng)GV車(chē)身上逐漸加載200 kg重物,通過(guò)觀(guān)察車(chē)輪外側(cè)面與角尺間的間隙變化進(jìn)行試驗(yàn).觀(guān)察到滿(mǎn)載時(shí),驅(qū)動(dòng)輪與地面接觸處因受力而向外傾斜,即驅(qū)動(dòng)輪“外掰”,如圖2所示.
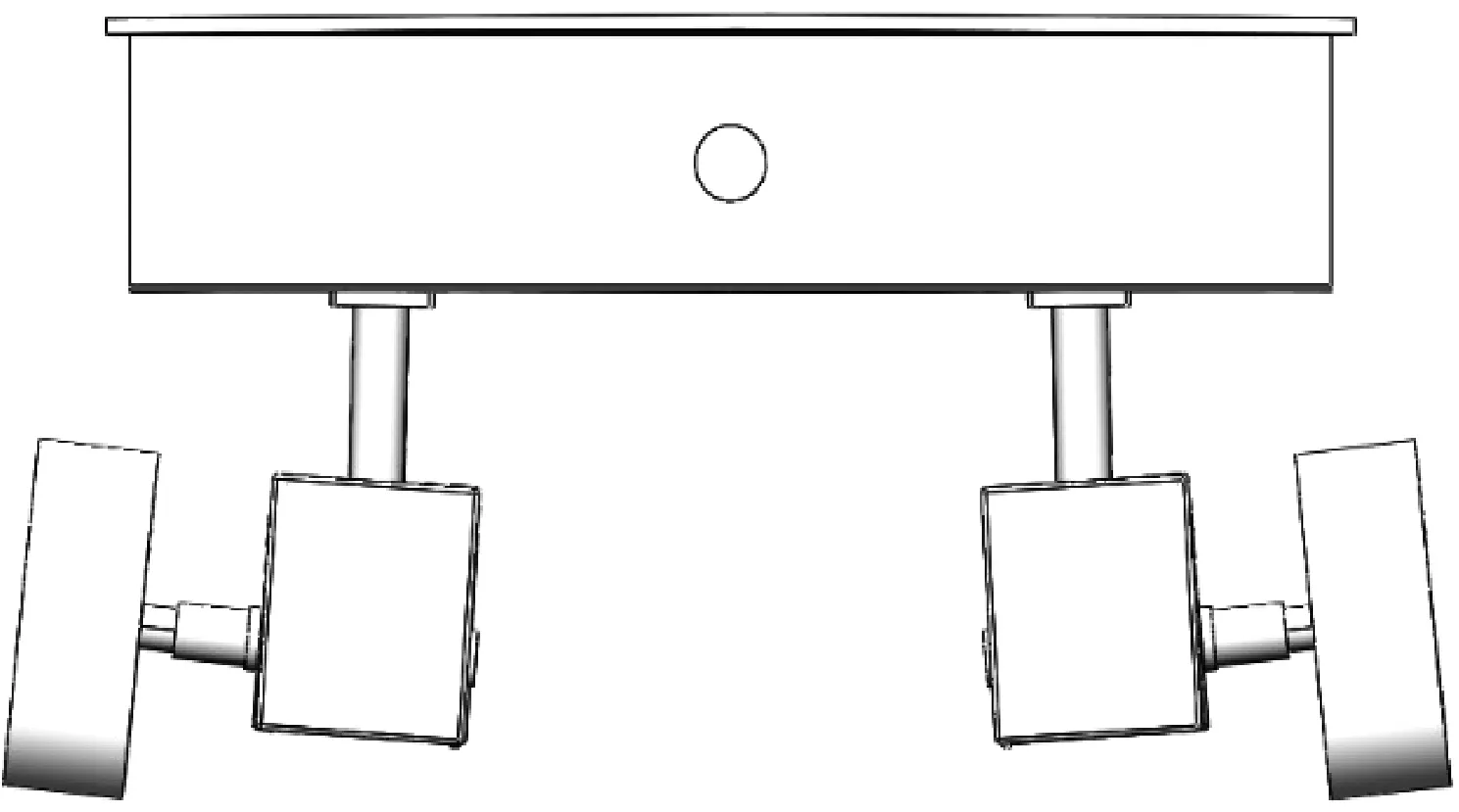
圖2 “外掰”現(xiàn)象示意圖Fig.2 Sketch of the phenomenon of “outside breaking”
試驗(yàn)時(shí)將AGV斷電側(cè)翻放置,用較小力撥動(dòng)驅(qū)動(dòng)輪時(shí),車(chē)輪在一定的范圍內(nèi)轉(zhuǎn)動(dòng),但驅(qū)動(dòng)電機(jī)并未產(chǎn)生相應(yīng)轉(zhuǎn)動(dòng),而是鏈輪輪齒在鏈節(jié)距的空隙中晃動(dòng).在A(yíng)GV啟停時(shí)會(huì)出現(xiàn)因機(jī)構(gòu)空隙產(chǎn)生的明顯沖擊,即啟停“沖擊”.針對(duì)上述現(xiàn)象,分別從結(jié)構(gòu)受力和傳動(dòng)機(jī)構(gòu)特點(diǎn)進(jìn)行分析,找出導(dǎo)致該現(xiàn)象的原因,并提出了新的驅(qū)動(dòng)單元機(jī)構(gòu).
1.2 靜力分析
1.2.1 靜應(yīng)力預(yù)測(cè)
由材料力學(xué)知識(shí)可知:AGV驅(qū)動(dòng)單元是一個(gè)“L”形的懸臂結(jié)構(gòu),如圖3所示,將在接觸點(diǎn)A處、B處和C處形成較大的應(yīng)力集中[9]. 為進(jìn)一步確定應(yīng)力較大的區(qū)域,現(xiàn)進(jìn)行有限元分析.

圖3 驅(qū)動(dòng)單元受力示意圖Fig.3 Force diagram of driving unit
1.2.2 有限元分析
(1)簡(jiǎn)化模型和定義材料.本機(jī)構(gòu)用SolidWorks Simulation進(jìn)行有限元仿真分析[10-11].為保證結(jié)果可靠,將模型中不影響受力的部分進(jìn)行簡(jiǎn)化,只保留驅(qū)動(dòng)輪輪軸、驅(qū)動(dòng)單元?dú)んw、圓柱導(dǎo)軌和與之接觸的殼體進(jìn)行有限元分析.材料的彈性模量為210 GPa、密度為7 800 kg/m3、屈服強(qiáng)度為220 MPa,選擇普通碳鋼材料.
(2)設(shè)定邊界條件.小車(chē)重力完全施加在驅(qū)動(dòng)單元上,故為分離出的驅(qū)動(dòng)單元添加平面約束,使其只能沿豎直方向運(yùn)動(dòng).添加彈性支撐代替車(chē)輪.與直線(xiàn)軸承相接觸的直線(xiàn)導(dǎo)軌添加“接觸”約束.動(dòng)力殼體與直線(xiàn)軸承之間的彈簧用“彈簧”來(lái)代替.效果如圖4(a)所示.
(3)添加載荷.滿(mǎn)載時(shí)驅(qū)動(dòng)單元上的等效質(zhì)量為232.81 kg,重力加速度取9.806 65 m/s2.室內(nèi)平地上運(yùn)動(dòng),選擇載荷系數(shù)為1.2.載物臺(tái)上重物放置區(qū)內(nèi)施加載荷2 739.7 N.車(chē)輪與地面接觸的摩擦系數(shù)選為0.25.先利用無(wú)摩擦仿真得出接觸面正壓力,再在接觸面添加等效摩擦力342.5 N.
(4)劃分單元格.SolidWorks Simulation為保證對(duì)各種幾何體和面的網(wǎng)格劃分的通用性,統(tǒng)一采用一階四面體、二階四面體、一階三角形、二階三角形進(jìn)行網(wǎng)格劃分,且大量試驗(yàn)保證了算法的可靠性和效率.對(duì)于非壓力容器的薄板件,在進(jìn)行網(wǎng)格劃分時(shí)推薦使用單層二階四面體進(jìn)行網(wǎng)格劃分結(jié)果更優(yōu)[12-13].故本仿真統(tǒng)一采用二階實(shí)體四面體進(jìn)行板件和實(shí)體的網(wǎng)格劃分.
總體采用基于曲率的網(wǎng)格,雅可比點(diǎn)數(shù)為4點(diǎn),調(diào)整好單元格的精度進(jìn)行網(wǎng)格劃分[14],未細(xì)化區(qū)域最大單元格為28.545 5 mm,最小單元格為5.709 1 mm,增長(zhǎng)比率為1.6.
對(duì)關(guān)注的區(qū)域進(jìn)行單元格的細(xì)化.選取應(yīng)力集中區(qū)的零件和邊界線(xiàn):直線(xiàn)軸承、驅(qū)動(dòng)輪軸、動(dòng)力單元?dú)んw、導(dǎo)軌和動(dòng)力殼體邊線(xiàn),使用網(wǎng)格控制進(jìn)行網(wǎng)格劃分.
細(xì)化部分最大網(wǎng)格為5.119 26 mm,最小網(wǎng)格為3.358 93 mm.網(wǎng)格節(jié)總數(shù)為946 585,單元總數(shù)為644 846.驅(qū)動(dòng)單元模型網(wǎng)格劃分,如圖4(b)所示.

圖4 邊界條件和網(wǎng)格模型Fig.4 Boundary conditions and grid model
(5)進(jìn)行有限元分析.運(yùn)行有限元解算器進(jìn)行解算,得出等效應(yīng)力分布云圖,如圖5所示.
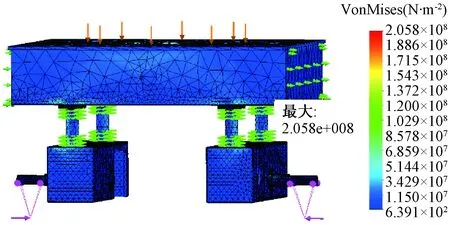
圖5 原系統(tǒng)等效應(yīng)力分布圖Fig.5 Equivalent stress distribution diagram
1.2.3 結(jié)果分析
利用Simulation的設(shè)計(jì)洞察功能以顏色著重顯示出應(yīng)力較大的區(qū)域,如圖6所示.

圖6 應(yīng)力較大區(qū)域Fig.6 Larger stress area
從圖6中可以看到,標(biāo)號(hào)1~10處是應(yīng)力較大區(qū)域,11代表上殼體.其平均應(yīng)力、最大應(yīng)力、均方根值見(jiàn)圖7.最大應(yīng)力出現(xiàn)在4處,為205.8 MPa,而材料的屈服強(qiáng)度為220.6 MPa,安全系數(shù)僅為1.07.一般車(chē)輛設(shè)計(jì)要求重要部位的安全系數(shù)大于等于2.

圖7 原系統(tǒng)應(yīng)力較大區(qū)域數(shù)據(jù)圖Fig.7 Large stress area data diagram
驅(qū)動(dòng)單元“L”形懸臂結(jié)構(gòu)引起了過(guò)大局部應(yīng)力,同時(shí),這樣的結(jié)構(gòu)會(huì)將車(chē)體接觸處的各個(gè)間隙進(jìn)一步放大,使車(chē)輪的“外掰”現(xiàn)象更加明顯.
1.3 傳動(dòng)結(jié)構(gòu)分析
在A(yíng)GV啟停時(shí),有明顯的因機(jī)構(gòu)間隙引起的位移,即“空隙沖擊”現(xiàn)象,將影響AGV的運(yùn)動(dòng)精度.AGV底部實(shí)物結(jié)構(gòu)如圖8所示.

圖8 AGV底部實(shí)物結(jié)構(gòu)圖Fig.8 Physical bottom structure of AGV
AGV的驅(qū)動(dòng)電機(jī)與驅(qū)動(dòng)輪之間靠鏈傳動(dòng)連接,而鏈傳動(dòng)在有雙向運(yùn)動(dòng)時(shí)會(huì)引起較大的沖擊.在非連續(xù)運(yùn)動(dòng)時(shí),沒(méi)有二次定位機(jī)構(gòu)的輔助,常常會(huì)有“躥動(dòng)”,丟失精度.
2 新型驅(qū)動(dòng)單元結(jié)構(gòu)設(shè)計(jì)
2.1 AGV驅(qū)動(dòng)單元設(shè)計(jì)
2.1.1 方案設(shè)計(jì)
針對(duì)AGV運(yùn)行中遇到的上述問(wèn)題,新的機(jī)構(gòu)需要避免車(chē)輪的長(zhǎng)懸臂和鏈傳動(dòng),同時(shí)考慮兩個(gè)驅(qū)動(dòng)輪的間距與干涉,以及成本問(wèn)題,并要求能對(duì)應(yīng)力狀況、可靠性有所改善.
將驅(qū)動(dòng)輪軸由懸臂梁結(jié)構(gòu)改為簡(jiǎn)支梁的形式,驅(qū)動(dòng)輪軸兩端通過(guò)軸承與驅(qū)動(dòng)殼體連接在一起.同時(shí),將原有電機(jī)改為弧錐直角式中空減速電機(jī),使電機(jī)和驅(qū)動(dòng)輪軸直接相連.該連接方式將避免因懸臂結(jié)構(gòu)產(chǎn)生的彎矩,同時(shí)省去中間的鏈傳動(dòng)環(huán)節(jié),傳動(dòng)精度、傳動(dòng)效率都有所提高.
2.1.2 選型設(shè)計(jì)
AGV運(yùn)動(dòng)時(shí)沿運(yùn)動(dòng)方向上所受的加速度阻力、斜坡阻力、風(fēng)阻、滾動(dòng)摩擦阻力和靜摩擦提供的驅(qū)動(dòng)力滿(mǎn)足方程[15]:
Fk=Fa+FG+FR+FD,
(1)
(2)
FG=mg sinα,
(3)
(4)
式中:Fk為靜摩擦提供的驅(qū)動(dòng)力;Fa為等效加速度阻力;FG為坡度阻力;FR為車(chē)輪滾動(dòng)摩擦阻力;FD為空氣阻力;δ為旋轉(zhuǎn)質(zhì)量的換算系數(shù);m為車(chē)體和貨物總質(zhì)量;V為速度;t為時(shí)間;α為坡度角,當(dāng)坡度角較小時(shí)有sinα=α;CD為風(fēng)阻系數(shù);ρa(bǔ)是空氣密度,為1.225 8 kg/m3;A為迎風(fēng)面積.
對(duì)小車(chē)單個(gè)驅(qū)動(dòng)單元的驅(qū)動(dòng)輪進(jìn)行受力分析可得方程:
FkRK=MK,
(5)
FR=fRG,
(6)
式中:Rk為車(chē)輪半徑;MK為車(chē)輪上驅(qū)動(dòng)力矩;FR為車(chē)輪滾動(dòng)摩擦阻力;fR為滾動(dòng)摩擦系數(shù);G為單個(gè)驅(qū)動(dòng)輪上承受的車(chē)體和重物的總重力.
通過(guò)上式的受力分析,計(jì)算出驅(qū)動(dòng)力矩、額定轉(zhuǎn)速、減速比和各傳動(dòng)件、連接件電機(jī)參數(shù).通過(guò)對(duì)設(shè)計(jì)壽命和傳動(dòng)精度及最大扭矩的要求,計(jì)算選擇了軸承、鍵、軸和一些連接件的相應(yīng)型號(hào)[16].
2.2 新型驅(qū)動(dòng)單元模型建立
根據(jù)設(shè)計(jì)的加工件和選用的標(biāo)準(zhǔn)件尺寸,建立AGV驅(qū)動(dòng)單元的三維模型.其結(jié)構(gòu)如圖9所示.
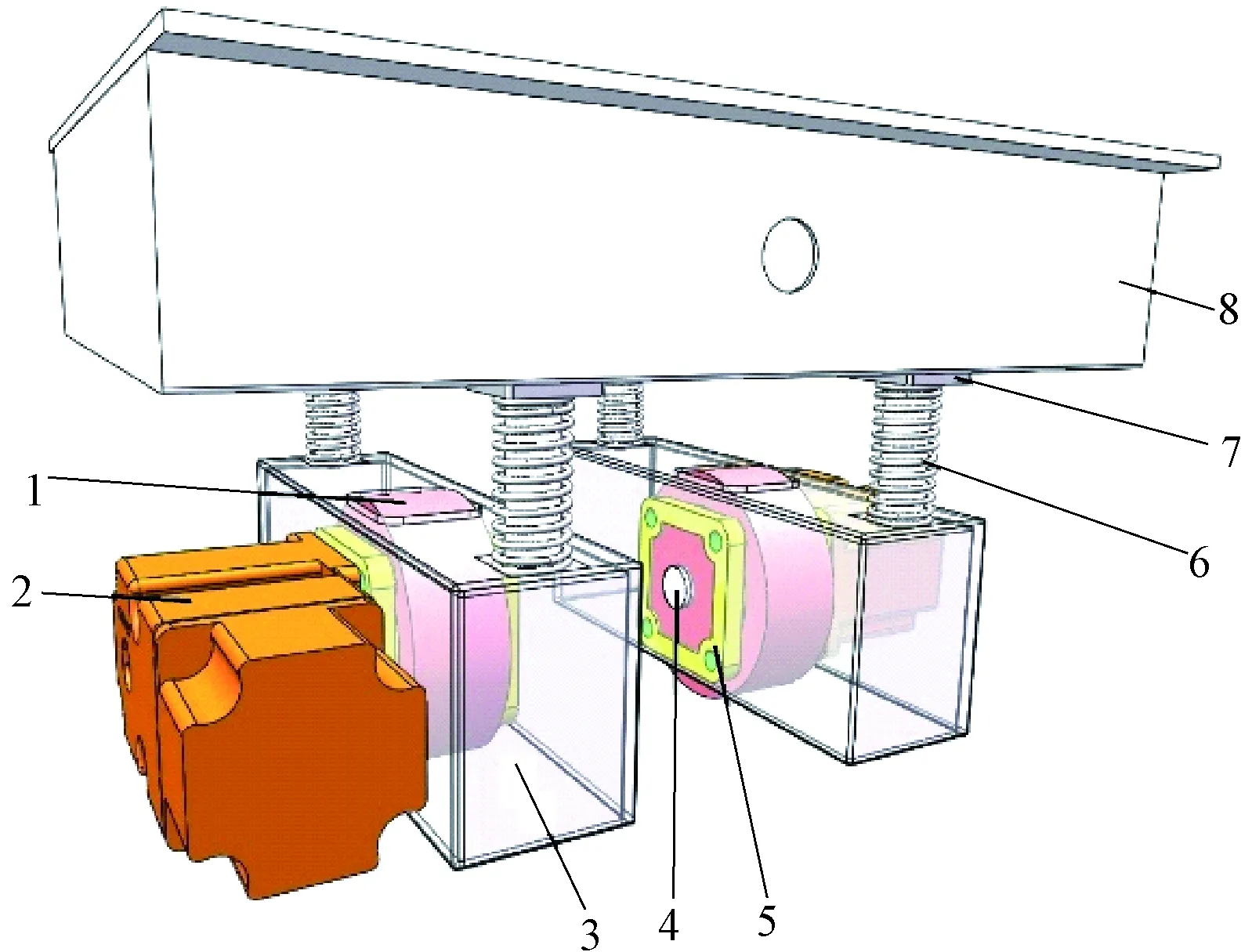
1—驅(qū)動(dòng)輪;2—驅(qū)動(dòng)電機(jī);3—驅(qū)動(dòng)殼體;4—驅(qū)動(dòng)輪軸;5—法蘭軸承;6—彈簧;7—直線(xiàn)軸承;8—車(chē)身上殼體圖9 新型動(dòng)力單元結(jié)構(gòu)圖Fig.9 Structure of new type of power unit
驅(qū)動(dòng)單元使用簡(jiǎn)支梁式直連驅(qū)動(dòng)電機(jī)的形式有效避免了驅(qū)動(dòng)單元的整體彎矩,降低了材料應(yīng)力,進(jìn)而避免了滿(mǎn)載運(yùn)行時(shí)車(chē)輪大幅“外掰”問(wèn)題.由于電機(jī)的安裝孔可以調(diào)節(jié),電機(jī)直連的方式并沒(méi)有讓電機(jī)承受來(lái)自徑向的壓力,而且這種連接方式提高了傳動(dòng)的精度和可靠度.
3 驅(qū)動(dòng)單元對(duì)比分析
3.1 應(yīng)力分析對(duì)比
為深入研究新機(jī)構(gòu)的應(yīng)力,現(xiàn)對(duì)新驅(qū)動(dòng)單元進(jìn)行有限元分析.①模型簡(jiǎn)化和材料定義與原驅(qū)動(dòng)單元相同.②設(shè)定邊界條件時(shí),代替車(chē)輪的彈性支撐按車(chē)輪實(shí)際接觸位置添加,其他設(shè)置和原驅(qū)動(dòng)單元相同.③添加載荷,設(shè)置和原驅(qū)動(dòng)單元相同.④劃分單元格.細(xì)化零件按推薦良好品質(zhì)設(shè)置,最大網(wǎng)格為5.284 38 mm,最小網(wǎng)格為3.390 31 mm.劃分網(wǎng)格后,節(jié)總數(shù)為924 859,單元總數(shù)為627 313,如圖10所示.⑤運(yùn)行解算得到仿真結(jié)果如圖11所示.應(yīng)力較大區(qū)域數(shù)據(jù)如圖12所示. 改進(jìn)前后應(yīng)力較大區(qū)域數(shù)據(jù)對(duì)比如圖13所示.
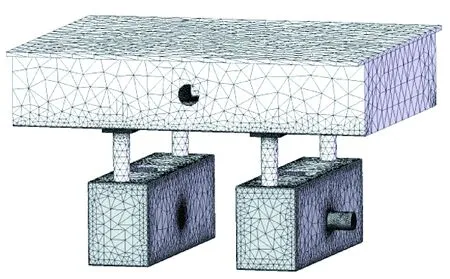
圖10 驅(qū)動(dòng)單元網(wǎng)格模型Fig.10 The mesh model of driving unit
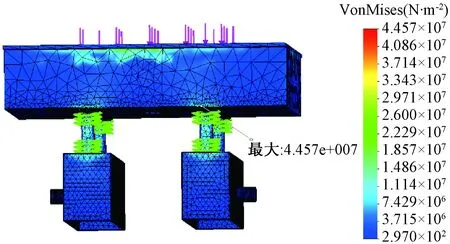
圖11 改進(jìn)系統(tǒng)等效應(yīng)力分布圖Fig.11 Equivalent stress distribution diagram

圖12 改進(jìn)系統(tǒng)應(yīng)力較大區(qū)域數(shù)據(jù)圖Fig.12 Large stress area data diagram
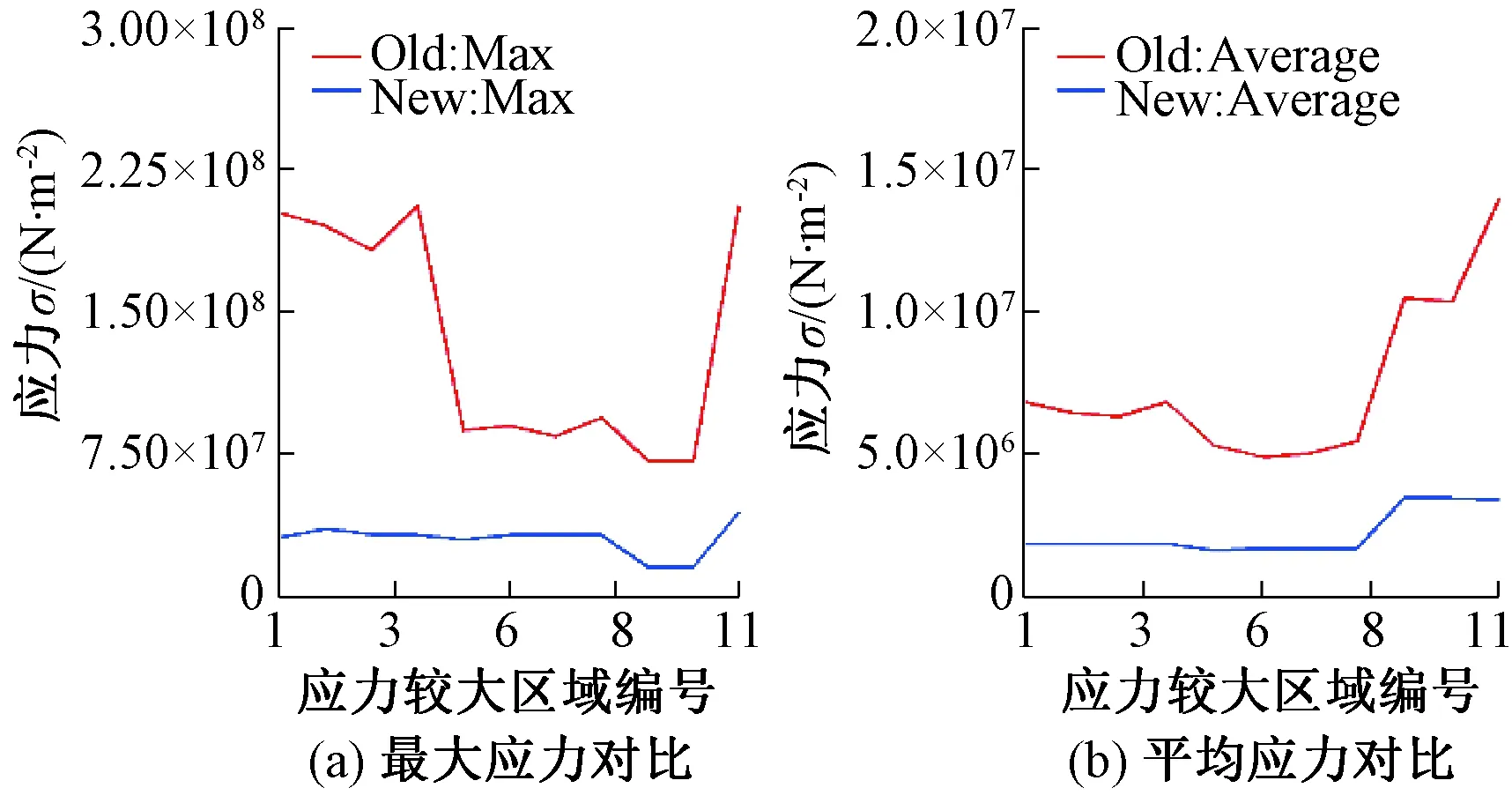
圖13 應(yīng)力較大區(qū)域數(shù)據(jù)對(duì)比圖Fig.13 Large stress area data comparison diagram
由AGV新型驅(qū)動(dòng)單元的結(jié)構(gòu)模型等效應(yīng)力分布云圖和應(yīng)力較大區(qū)域?qū)Ρ葓D可以看到,在材料、尺寸、分析條件一樣的情況下,新的驅(qū)動(dòng)單元最大的應(yīng)力出現(xiàn)在3號(hào)區(qū)域附近,為44.57 MPa,遠(yuǎn)遠(yuǎn)小于原有驅(qū)動(dòng)單元的最大應(yīng)力205.8 MPa,同時(shí)也遠(yuǎn)遠(yuǎn)小于材料的屈服強(qiáng)度220.6 MPa.此時(shí),新機(jī)構(gòu)的安全系數(shù)大大增加,為4.95,滿(mǎn)足安全系數(shù)大于等于2的要求.改進(jìn)后應(yīng)力集中區(qū)域最大應(yīng)力值和平均應(yīng)力值都有明顯下降.其他條件不變時(shí),結(jié)構(gòu)的變化使最大應(yīng)力降低為原來(lái)的21.66%,這為AGV車(chē)體的輕量化設(shè)計(jì)提供了較大空間.
3.2 精度分析對(duì)比
在新的驅(qū)動(dòng)單元中,避免使用大間隙傳動(dòng)機(jī)構(gòu)滾子鏈的使用,使用弧錐直角空輸出軸減速電機(jī)與驅(qū)動(dòng)輪直接相連.在減速器上選用弧錐直角空輸出軸的減速器,使連接的空間減小,方便兩個(gè)驅(qū)動(dòng)單元單體間距調(diào)整.經(jīng)計(jì)算選型的弧錐直角減速電機(jī)的減速比為5,傳動(dòng)級(jí)數(shù)為2級(jí),較少的傳動(dòng)環(huán)節(jié)和較低的傳動(dòng)級(jí)數(shù)能有效地減小傳動(dòng)中由各機(jī)構(gòu)接觸間隙形成的誤差.其結(jié)構(gòu)如圖14所示.

1—弧錐直角空輸出軸減速電機(jī); 2—驅(qū)動(dòng)輪軸; 3—驅(qū)動(dòng)輪; 4—驅(qū)動(dòng)殼體; 5—法蘭軸承圖14 新型動(dòng)力單元單側(cè)結(jié)構(gòu)圖Fig.14 New power unit unilateral structure
與原來(lái)驅(qū)動(dòng)單元相比,新驅(qū)動(dòng)單元消除了“空隙沖擊”現(xiàn)象,同時(shí)減少了中間傳動(dòng)的環(huán)節(jié),消除了中間環(huán)節(jié)的誤差,同時(shí)減少了誤差積累,使傳動(dòng)的精度大大提高.
4 結(jié)論
新驅(qū)動(dòng)單元在受力上,避免了“外掰”問(wèn)題,使最大應(yīng)力降低了78.34%,機(jī)構(gòu)安全系數(shù)提升了4.63倍;改進(jìn)了傳動(dòng)機(jī)構(gòu),降低了傳動(dòng)級(jí)數(shù),減小了傳動(dòng)間隙,提高了傳動(dòng)系統(tǒng)的精度;在制造成本上,減少了機(jī)加工量,提高了機(jī)構(gòu)可靠性,降低了設(shè)計(jì)加工成本和維護(hù)更換成本.結(jié)果表明,新型驅(qū)動(dòng)單元解決了傳統(tǒng)驅(qū)動(dòng)單元車(chē)輪“外掰”和傳動(dòng)機(jī)構(gòu)“大空隙”問(wèn)題,為AGV驅(qū)動(dòng)單元的設(shè)計(jì)提供了一種方便、可靠的結(jié)構(gòu).
猜你喜歡
哲學(xué)評(píng)論(2021年2期)2021-08-22 01:53:34
民用飛機(jī)設(shè)計(jì)與研究(2020年4期)2021-01-21 09:15:02
中華詩(shī)詞(2019年7期)2019-11-25 01:43:04
模具制造(2019年3期)2019-06-06 02:10:54
電子制作(2018年18期)2018-11-14 01:48:24
山東工業(yè)技術(shù)(2016年15期)2016-12-01 05:31:22
影視與戲劇評(píng)論(2016年0期)2016-11-23 05:26:01
現(xiàn)代企業(yè)(2015年9期)2015-02-28 18:56:50
中國(guó)中醫(yī)藥現(xiàn)代遠(yuǎn)程教育(2014年11期)2014-08-08 13:23:44
終身教育研究(2014年5期)2014-02-28 01:23:06