S模式二次雷達目標速度跳變研究
2018-09-13 07:40:58孫擎宇
無線互聯科技 2018年11期


摘要:S模式二次雷達作為民航雷達設備的發展方向,關注S模式二次雷達設備的運行和使用狀況,對安全生產有重要作用。文章以南京祿口國際機場所使用的INDRA公司生產的IRS-20MP/L型號S模式二次雷達設備為例,介紹了S模式二次雷達的使用情況,通過對2017年影響目標速度跳變的情況統計,分析S模式二次雷達目標速度跳變的原因,進一步提出目標航跡加權平均處理的多雷達數據融合方法,為S模式二次雷達目標速度跳變的相關研究提供可借鑒的經驗。
關鍵詞:S模式二次雷達;速度跳變;多雷達數據融合
隨著民航行業的飛速發展,航班量不斷增加,民航空管管制人員對二次雷達設備的依賴性日漸增強,二次雷達的重要性凸顯。縱觀民用二次雷達的發展史,由早期的常規二次雷達到單脈沖二次雷達,再到后來的全固態二次雷達,直至當今的S模式二次雷達,功能日漸增強,信息量越來越大,安全性越來越高。進入21世紀,S模式二次雷達設備陸續在國內開始使用,成了二次雷達設備更新換代的趨勢。以南京祿口國際機場為例,目前有一套S模式二次雷達設備在開放使用,預計未來南京機場將全部采用S模式二次雷達設備供空管管制部門使用。因此,關注S模式二次雷達設備在使用過程中所暴露出來的問題,并對其進行研究分析,對保障航空安全具有廣泛且深遠的意義[1]。
本文以南京目前在開放使用的西班牙INDRA廠家生產的IRS-20MP/L型號S模式二次雷達設備為例,對其產生的目標速度跳變問題進行研究和分析,希望能對相關技術人員有所啟發。
1 目標速度跳變原因
速度跳變通常是指目標在移動過程中,速度發生抖動,突然產生速度升高或者降低的現象。管制人員通過自動化顯示屏幕指揮飛機,目標的速度數據是由二次雷達設備給出,通過網絡傳輸,經過自動化設備,最終顯示在管制終端。因此,管制人員所看到的目標的速度跳變,有可能是飛機真實的速度變化,也有可能是網絡傳輸或者雷達和自動化設備所引起的。下面我們主要討論由二次雷達設備所引起的目標速度跳變情況。在空中交通管制中,目標產生速度跳變,如果情況頻發或者較為嚴重,會直接影響管制部門對飛機的正常指揮,嚴重情況可能會直接導致飛機避讓或者復飛的不安全事件[2]。
1.1 目標的航跡抖動
當雷達獲得目標前一次的點跡數據與后一次的點跡數據關聯性較差,或者說兩次數據解析出的位置信息相差超過正常范圍,便會產生航跡抖動,直接反映在管制自動化屏幕上便是目標移動出現異常,移動距離突然變大或者變小,這會直接導致目標產生速度跳變[3]。2017年南京INDRA S模式二次雷達航跡抖動統計如表1所示。
回放錄像,目標此時都處在大幅度轉向或者直角拐彎的時間段里,姿態變化非常大。
1.2 目標的高度跳變
高度跳變是指雷達針對同一目標,接連兩次解析出來的高度數據關聯性較低,產生高度變化異常,如果高度變化非常大,就有可能導致目標的速度跳變。2017年南京INDRA S模式二次雷達高度跳變統計如表2所示。
經過回放錄像,分析認為:(1)目標在下降過程中產生的高度跳變有可能是由于目標所處周圍環境的氣壓產生變化所致,因為雷達地面站所獲得的高度數據通常都是解析飛機上的氣壓高度表給出的數據而來。(2)根據資料,INDRA S模式二次雷達解析出來的高度數據會有7 m左右的誤差,屬于正常范圍,一般不會導致目標出現速度跳變。
(3)目標在落地過程中,低于雷達天線的水平高度時,會導致雷達設備在低俯仰角條件下,波束開裂,與天線的俯仰角有關,也可歸屬為天線性能問題[4]。
1.3 目標航跡丟失
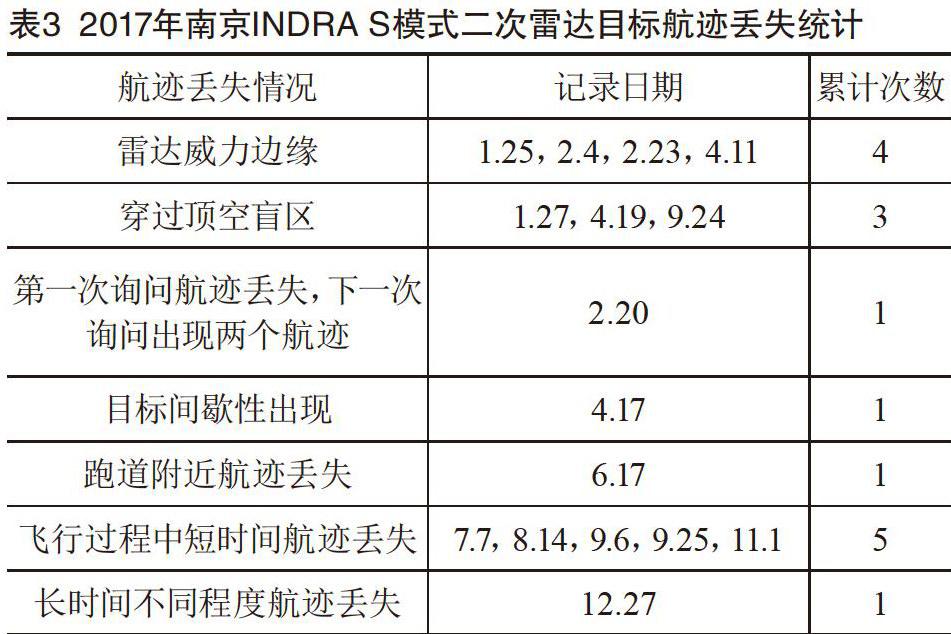
在雷達探測目標的過程中,有時會出現目標航跡丟失情況,也會引起目標的速度跳變。2017年南京INDRA S模式二次雷達目標航跡丟失統計如表3所示。
將目標航跡丟失的情況進行總結:(1)雷達設備本身屬性有關,例如穿越雷達的頂空盲區、目標處在雷達的威力范圍邊緣等情況。(2)雷達設備故障,例如監控軟件出現故障,導致第一次詢問航跡丟失,下一次詢問出現兩個航跡。(3)目標周圍環境有關,例如跑道上目標被遮擋。(4)機載設備問題,引起多雷達航跡丟失。
2 預防措施和解決方法
單雷達數據處理系統,監視范圍有限,精度不高,易出現目標航跡抖動、航跡丟失和高度跳變等問題,為了提供連續的空中交通狀況,確保飛行安全的最好方法就是采用多雷達數據處理系統,通過多雷達聯網實現數據融合,可以大大提高監視目標的質量,減少目標速度跳變情況的發生。雷達數據處理中的多目標跟蹤方法可分為兩類:(1)最大似然法,包括人工標圖法、航跡分義發,聯合似然算法、0-1整數規劃法、廣義相關法等。(2)貝葉斯方法,包括概率數據互聯算法、聯合概率數據互聯算法,最近鄰域法、最優貝葉斯算法,多假設法等[5]。加權平均法是一種典型的數據融合算法,主要根據雷達的測量精度對其設置權值,精度高的權值大,精度低的權值小。權值可以在系統運行時根據需要進行靈活設置。Pow1?powN是各雷達對應的權限,para1?paraN是各雷達的目標航跡參數,para是加權后的目標航跡參數,有:
上式對目標航跡的位置、高度和速度的融合處理都合適。最后,把加權融合后的航跡用來更新對應的目標系統航跡。目標航跡加權處理流程如圖1所示。加權平均法形式簡單、運算量小,其融合精度要低于精度高的單站,但比精度低的單站效果好,是空管自動化系統易于實現的較為實用的數據融合方法。使用該方法,最好采用精度相近的雷達數據進行融合,否則有可能會引入其他的目標速度跳變情況[6]。
另外,航路航線設計避開雷達的頂空盲區,加強雷達設備維護,適當調整雷達天線的俯仰角以及加強與航空公司溝通等方法也可以有效地預防和解決問題。
3 結語
文中通過參考相關技術資料,以南京機場為例,對2017年INDRA S模式二次雷達所發生的目標速度跳變情況進行統計,并分析引起目標速度跳變的原因,包括航跡抖動、航跡丟失和高度跳變等情況,針對S模式二次雷達目標跳變的原因,給出“多雷達加權融合”的解決方法,該方法實用性強,使用簡單,可作為自動化進行雷達信號融合的參考方法之一。
[參考文獻]
[1]蘇志剛.二次雷達設備[M].北京:中國民航學院出版社,1998.
[2]劉偉,胡明華.空管多雷達數據處理系統研究[J].江蘇航空,2005(3):17-19.
[3]丁鷺飛.雷達原理[M].北京:電子工業出版社,2014.
[4]孫擎宇.淺談ALENIA單脈沖二次雷達對數中放組件維修[J].科技創新與應用,2018(5):66-68.
[5]李曉峰.通信原理[M].北京:清華大學出版社,2014.
[6]張尉.二次雷達原理[M].北京:國防工業出版社,2009.