高軌光學成像衛星動目標跟蹤策略設計與仿真
2018-09-15 08:35:02黃麗霞彭鑫劉書豪趙華
航天器工程 2018年4期
關鍵詞:策略
黃麗霞 彭鑫 劉書豪 趙華
(北京空間飛行器總體設計部,北京 100094)
動目標類型多樣,主要包括大型船只、汽車、飛機等大中型運動目標,其運動軌跡隨機性較大,因此,光學成像衛星動目標跟蹤策略的適用范圍和有效性,都需要事先通過仿真手段進行驗證,以支持動目標跟蹤模式的設計。動目標跟蹤模式是高軌光學成像衛星重要的單星工作模式。在對動目標進行跟蹤時,始終讓動目標保持在衛星的視場范圍內,并提供準確的位置信息[1]。
目前,動目標跟蹤研究多集中在對動目標的搜索和動目標的運動預測[1-5],以及針對動目標的天基系統任務規劃方法[6-8];而針對動目標跟蹤過程中衛星視軸指向切換方面的研究,多基于使動目標始終處于相機觀測視場中心的基本策略[9-11]。這些研究都是基于條帶掃描、凝視為主要成像模式的一般遙感衛星,雖然也可以在一定程度上適用于高軌光學成像衛星,但未能充分發揮高軌光學成像衛星與地面相對位置變化緩慢、單幅觀測視場大的優勢;即使涉及高軌光學成像衛星,也都是以高低軌協同規劃為主,未對高軌光學成像衛星單星動目標跟蹤策略進行研究。
本文針對高軌光學成像衛星對同一區域可觀測時間長、觀測視場較大的特點,綜合考慮能源消耗、觀測視場利用率,提出了一種動目標跟蹤策略,為盡可能避免動目標丟失進行關鍵設計,并建立動目標跟蹤仿真系統,對跟蹤策略的有效性進行仿真驗證。
1 動目標跟蹤策略
高軌光學成像衛星的相機觀測視場一般為方形,且觀測視場范圍較大,本文以此為背景設計動目標跟蹤策略。首先,對目前已有的幾種動目標跟蹤方式進行優劣勢分析。
方式1:對動目標進行連續跟蹤,使動目標始終處于相機觀測視場中心。此策略需要基于較為準確的動目標軌跡曲線,并使相機在跟蹤過程中進行自主連續軌跡跟蹤,更適用于較小視場角的相機[1]。相機需要一直處于角度連續轉動的狀態,跟蹤指向精度要求高;當動目標運動性能超出衛星平臺設備有限的觀測能力時,需要采取衛星平臺隨動的跟蹤方式[10],此時衛星平臺需要頻繁進行姿態機動,消耗能源很大。由于高軌光學成像衛星的觀測視場范圍較大,若采用此種策略,一是需要對動目標未知的運行軌跡進行較為準確的預測與頻繁的軌跡修正,二是會對大載荷視場造成極大的浪費。
方式2:針對高軌光學成像衛星觀測視場范圍較大的特點,當動目標在觀測視場內時,保持姿態不動,進行持續成像;當動目標將要超出當前觀測視場范圍時,調整衛星姿態,使動目標再次處于觀測視場中心。這種方式的優點是,在姿態機動前不需要判斷動目標的運動趨勢便能實現對動目標的跟蹤,且動目標不易丟失;缺點是對觀測視場的利用率減少1/2,使得姿態機動次數增加1倍,造成能源的浪費。
方式3:為充分利用高軌光學成像衛星的相機觀測視場,改進方式2。當動目標在觀測視場內時,保持姿態不動,進行持續成像;當動目標將要超出當前觀測視場范圍時,判斷動目標運動趨勢,調整衛星姿態,使其觀測視場更新為上一觀測視場的相鄰觀測視場。這種方式的優點是能最大限度地減少姿態機動次數,節省能源消耗;缺點是容易造成動目標丟失,因為對動目標運動趨勢的判斷準確是實現動目標跟蹤的前提,當動目標的運動趨勢在觀測視場邊界附近突然變化時,動目標丟失的概率將大大增加。
根據以上分析,本文從最大限度利用觀測視場范圍、節省姿態機動所需能源消耗考慮,在方式3的基礎上,通過合理設計相鄰觀測視場之間的重疊覆蓋寬度,盡可能減少動目標丟失的可能性,對高軌光學成像衛星動目標跟蹤策略進行設計,并建立仿真系統對其有效性加以仿真驗證。
1.1 總體設計
為了便于問題描述,設定本文高軌光學成像衛星動目標跟蹤策略設計的前提為,在衛星進入動目標跟蹤模式之前,已有其他手段或采用其他工作模式獲取了動目標某時刻的位置信息。該信息作為本文動目標跟蹤策略的原始輸入。動目標跟蹤策略的實現流程如下。
(1)動目標的運動趨勢判斷。根據當前獲取的動目標位置及上次成像獲取的動目標位置之間的關系,判斷動目標的大致運動方向,作為計算下一個觀測視場位置的輸入信息之一。
(2)動目標與當前觀測視場邊界的距離計算。根據動目標的位置、觀測視場邊界點等信息,計算動目標與當前觀測視場邊界的距離,結合動目標運動趨勢,判斷動目標是否快要超出當前觀測視場。
(3)觀測視場中心點位置計算。以當前觀測視場為中心視場,聯合考慮觀測視場范圍、相鄰觀測視場覆蓋重疊寬度、姿態機動能力、動目標當前位置及運動趨勢,計算下一個觀測視場中心應指向的地面經緯度,作為計算衛星下一次姿態機動的目標姿態的輸入信息。
動目標跟蹤策略實現流程如圖1所示。其中:T為當前仿真時間;Ta為動目標出現時間;Ts為仿真步長;Pnext_c為姿態需要機動到的下一個觀測視場中心點位置;Pc[n]為當前觀測視場周邊相鄰觀測視場中心點位置,n為相鄰觀測視場編號(n∈[0,7]);Pt為動目標出現時刻的位置。
圖1 動目標跟蹤策略實現流程
1.2 避免動目標丟失的關鍵設計
在觀測視場切換的姿態機動過程中,動目標會暫時脫離衛星的觀測視場。在理想設置情況下,從衛星完成一幅圖像的拍攝,到地面系統獲取圖像信息,再到衛星收到新指令進行觀測視場切換的姿態機動完成姿態機動,整個過程中動目標運動方向一直保持不變,此時動目標與當前觀測視場邊界的距離閾值可等于零,相鄰觀測視場之間可不重疊。但是,在實際工作中,動目標運動方向可能在姿態機動過程中發生變化,因此要求相鄰觀測視場之間具有一定的重疊區域,這樣可以盡量避免動目標的丟失。對重疊覆蓋寬度的設計,是避免動目標丟失的關鍵內容。圖2為重疊覆蓋寬度設計示意。十字箭頭代表動目標的4個運動方向,十字箭頭中心代表動目標將要越出當前觀測視場時的目標位置。D為動目標快要越出當前觀測視場邊界的距離閾值,R為在姿態機動過程中動目標在+X,+Y,-X,-Y方向上運動的最大距離,W為相鄰觀測視場之間的重疊覆蓋寬度。
圖2 相鄰觀測視場重疊覆蓋寬度設計示意Fig.2 Design of overlap width between adjacent visual fields
假設從衛星觀測成像到地面獲取到圖像信息,再完成新指令上注的時間為固定時間Tb,相鄰觀測視場之間姿態切換的最長時間為Tc,則在T=Tb+Tc時間內,動目標狀態處于不可知狀態。設衛星能跟蹤的動目標最大運動速度為Vmax,則
R=Vmax·T
(1)
通過分析可得,動目標在衛星姿態切換的時間內調頭轉向,并以反方向最大速度運動時,是動目標跟蹤過程中可能出現的最惡劣情況。為保證此時依然使動目標保持在切換后的觀測視場范圍內,可將相鄰觀測視場重疊覆蓋寬度設計為
W=2R
(2)
2 仿真驗證
2.1 動目標跟蹤策略仿真系統架構
動目標跟蹤仿真系統是一套基于時空推演的動態仿真系統,系統的基準場景中包括地球、太陽等天體對象。這些對象依據設定的星歷時間和空間運行規律,其位置、速度等隨星歷時間變化而變化。在基準場景中,根據衛星任務的數據鏈路完整性要求,還建立了測控站、數傳站、運動目標、衛星等對象。在仿真系統中,這些對象依照同一時間軸統一按設定程序運行。仿真系統重點需要建立包括運動目標軌跡、衛星軌道、衛星姿態動力學與控制、有效載荷、動目標跟蹤控制等仿真模型,這些模型之間的輸入輸出數據交互關系通過仿真系統的模型接口關聯功能實現。各模型的功能及輸入輸出接口如下。
(1)衛星軌道仿真模型:根據初始協調世界時(UTC)、軌道六根數等,考慮各種攝動,模擬軌道運行狀態,輸出仿真時段內每個時刻的軌道位置、速度等信息。
(2)動目標運動軌跡模型:模擬動目標的運動軌跡,即模擬動目標在仿真時段內每個時刻所處的位置(本文中為經緯度)。
(3)相機觀測視場邊界計算仿真模型:對相機觀測視場邊界點進行計算,根據相機在衛星本體的安裝方位、相機視場角、衛星軌道、衛星姿態等信息,計算當前狀態下觀測視場在地面的邊界點經緯度。
(4)動目標跟蹤策略仿真模型:通過動目標運動趨勢判斷、動目標與當前觀測視場邊界的距離計算、下一觀測視場中心點位置計算3個步驟,實現動目標跟蹤策略的仿真模型建模計算。
(5)動目標姿態計算模型:根據下一個觀測視場中心點的經緯度、軌道信息,計算衛星目標姿態。
(6)衛星姿態動力學與控制模型:按照衛星目標姿態指令,根據當前軌道信息、姿態信息,對衛星姿態進行控制,使衛星機動到目標姿態,實現對動目標的觀測。
以上模型共同構成動目標跟蹤策略仿真系統的模型庫,通過相互數據交互,完成動目標跟蹤策略的仿真。以下對與動目標跟蹤策略相關的關鍵仿真模型建模原理進行說明。
2.2 觀測視場中心點計算
相機觀測視場為方形,觀測視場中心點的計算需要以下幾個步驟。
1)計算當前觀測視場在地面投影的中心點及4個邊界點
觀測視場中心及邊界點計算模塊根據當前軌道位置、速度,結合當前衛星姿態角、姿態角速度,以及相機安裝方位、相機側向及縱向視場半角,計算相機中心視軸、相機觀測視場4條邊界視軸與地球表面的交點,即為地面觀測視場的中心點及4個邊界點。
如圖3所示,O為地心,S為衛星位置,P為相機視軸與地球表面的交點。Re為地球半徑,通過衛星位置可計算出衛星距地心距離Rs。通過衛星姿態、相機安裝角及視場半角信息可得θ,根據三角公式可求得Sp,進而求得地面投影點在相機坐標系下的位置,通過坐標轉換即可求得投影點在J2000坐標系下的位置,從而得到投影點在地球上的經緯度。
圖3 計算視軸與地球表面交點示意
2)計算相鄰觀測視場中心點
首先,在地面虛擬一個九宮格,當前觀測視場作為九宮格的中心,其他8格代表當前觀測視場周邊8個相鄰的方形觀測視場,作為衛星下一步姿態機動后的8個可能的觀測視場。為盡可能避免動目標跟蹤丟失,相鄰觀測視場之間均有一定的覆蓋重疊(“井”字)區域,覆蓋重疊寬度可設置,如圖4所示。
相鄰8個觀測視場的中心點,可根據理想觀測視場寬度、重疊覆蓋寬度設計值,對當前觀測視場中心進行距離平移計算得到。當前觀測視場中心隨軌道運行而變化,相應的8個相鄰觀測視場中心也隨當前觀測視場中心變化而變化。
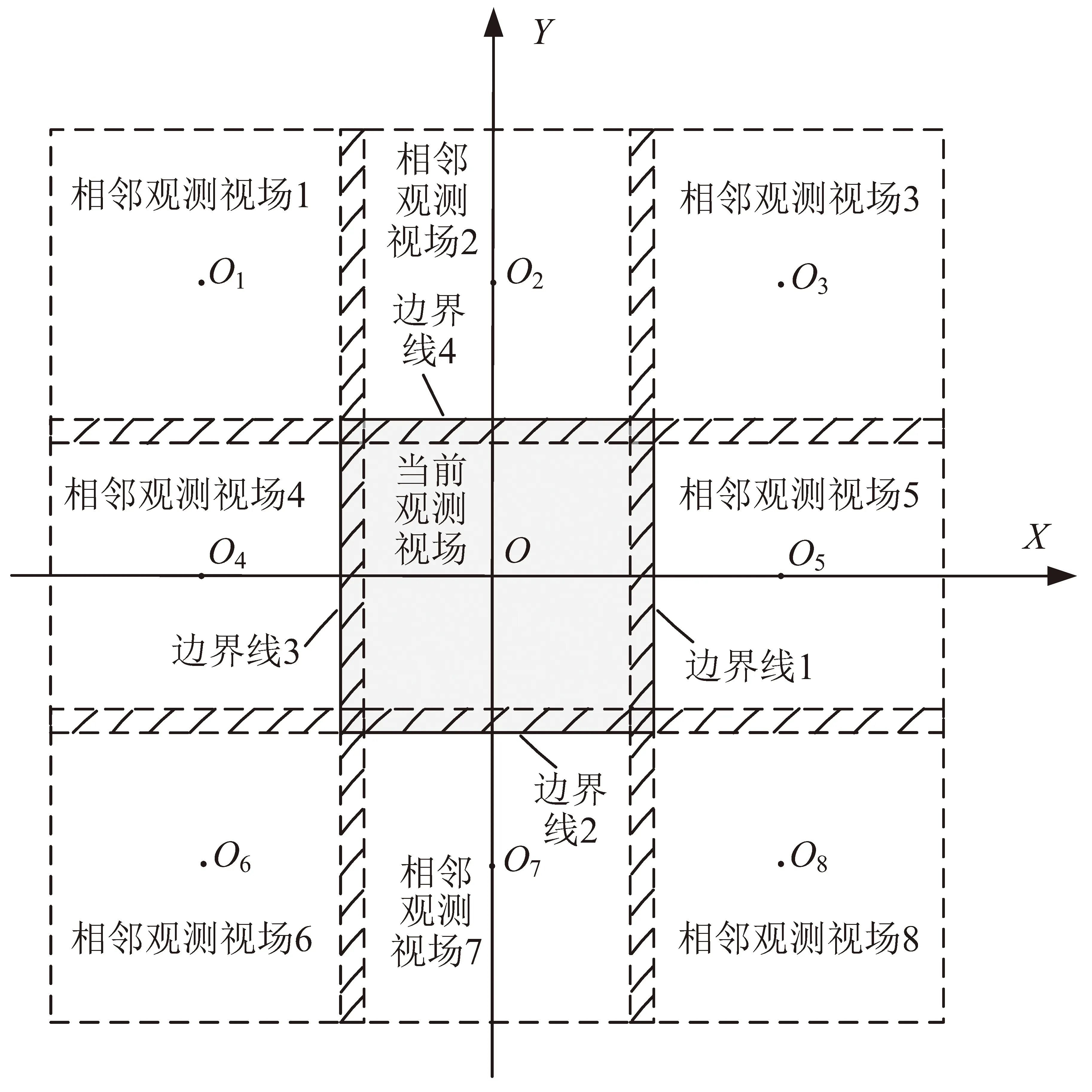
圖4 九宮格各觀測視場編號及當前觀測視場邊界線編號示意Fig.4 Order numbers of sudoku and boundary-lines of current visual field range
3)根據動目標運動趨勢判斷下一個觀測視場中心點
動目標正常運行在當前觀測視場中時,觀測視場九宮格的地面位置隨軌道運動而整體運動,九宮格的中心不記錄。當臨近當前觀測視場邊界的閾值時,發送姿態機動指令,同時記錄當前運算步九宮格的9個中心點位置,根據動目標運動趨勢選取其中1個相鄰格的中心點作為觀測視場中心。
以圖5的坐標系為基準,當動目標運動速度為VX>0,VY>0,則下一個可能觀測視場為觀測視場2、觀測視場3或觀測視場5。判斷動目標與當前觀測視場的邊界線1和邊界線4的距離,若動目標與邊界線1的距離、與邊界線4的距離均大于設定閾值,則保持姿態不變,繼續按一定的時間間隔成像并下傳;若動目標與邊界線1的距離不大于設定閾值,而與邊界線4的距離大于設定閾值時,判斷下一個觀測視場為觀測視場5;若動目標與邊界線1的距離、與邊界線4的距離均不大于設定閾值,判斷下一個觀測視場為觀測視場3;若動目標與邊界線1的距離大于設定閾值、與邊界線4的距離不大于設定閾值,判斷下一個觀測視場為觀測視場2。
其他運動趨勢,如(VX=0,VY<0),(VX=0,VY>0),(VX>0,VY=0),(VX<0,VY=0),(VX<0,VY<0),(VX<0,VY>0),(VX>0,VY<0),選取下一觀測視場的方法同上,在此不再贅述。
由于姿態機動需要時間,而當前計算得到的觀測視場中心為姿態機動完成后的觀測視場,因此,在計算衛星的目標姿態時,不應采用當前軌道信息,而應采用在當前軌道基礎上外推一個姿態機動時間(可設置,本文假設姿態完成一個觀測視場差的機動時間為40 s)后的軌道信息進行計算。
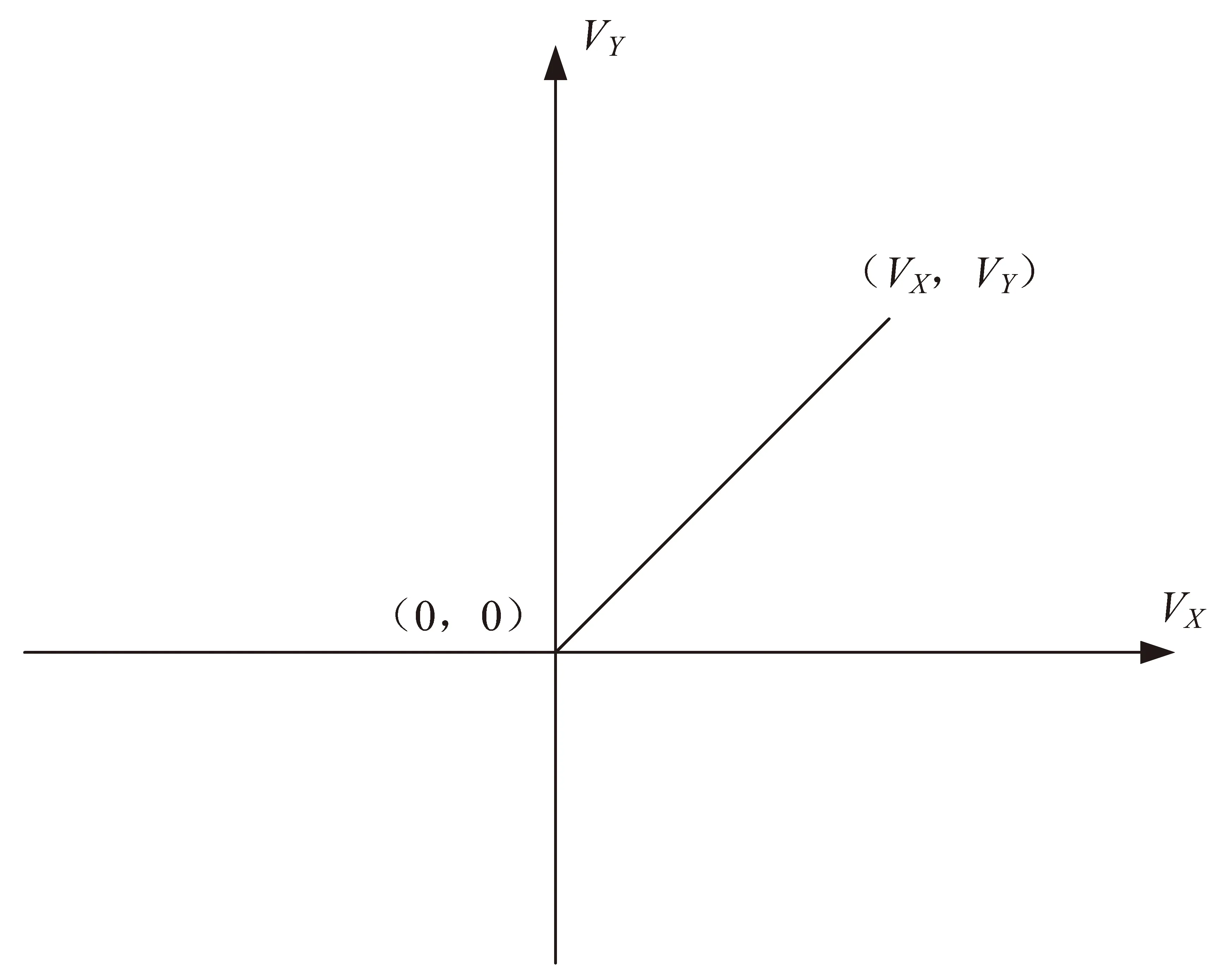
圖5 速度坐標系示意Fig.5 Coordinate diagram of velocity
2.3 動目標與觀測視場邊界距離計算
忽略地球曲面,將一個觀測視場的4個邊界點看成平面上的4個點,4個點兩兩連線成為邊界線,邊界線方程可用式(3)表達。設2個邊界點位置坐標分別為(a1,b1),(a2,b2),則2點連線的邊界線方程見式(4)。
Ax+By+C=0
(3)
(b1-b2)x+(a2-a1)y+(a1-a2)b1-
(b1-b2)a1=0
(4)
即
(5)
動目標與觀測視場邊界的距離計算遵循點到線的距離計算公式,見式(6)。
(6)
2.4 動目標運動趨勢判斷
對動目標運動趨勢進行判斷,是為了在動目標快要越出觀測視場邊界時,判斷目標接下來將會出現的位置,從而判斷下一步衛星需要指向的觀測視場中心位置。在衛星對動目標進行跟蹤時,動目標的運動狀態需要實時計算。對動目標運動趨勢的判斷,僅需要判斷其運動的主要方向。因此,可以采用動目標在當前運算步長下的位置與上一個運算步長的位置之差判斷其運動趨勢。動目標位置可采用經緯度來表示,經度之差的正、負值用于判斷東西方向的運動趨勢,緯度之差的正、負值用于判斷南北方向的運動趨勢。
2.5 動目標跟蹤仿真示例
初始條件設置:選取一傾斜地球同步軌道(IGSO),衛星相機視場角假設為0.32°×0.32°,衛星相鄰觀測視場間機動時間(含穩定)為40 s,衛星能實現跟蹤的動目標最大速度為900 km/h。根據以上條件,可知理想觀測視場寬度約為200 km。動目標與觀測視場邊界線之間的距離閾值可設置為8.5 km,相鄰觀測視場之間的重疊覆蓋寬度可設計為17 km。
場景設置:假設動目標為飛機,運動速度為500 km/h,其運動軌跡設置為折線運動,經度范圍以(180°W,180°E)表示;緯度范圍為(90°S,90°N)表示。預設出發點經緯度為(110°E,0°N),2個運動方向轉換點的經緯度分別為(105.3°E,16°N)和(96.5°E,20°N),結束點經緯度為(85.3°E,30.5°N)。
通過仿真運行,飛機運動軌跡變化、觀測視場中心變化仿真結果曲線,如圖6所示。
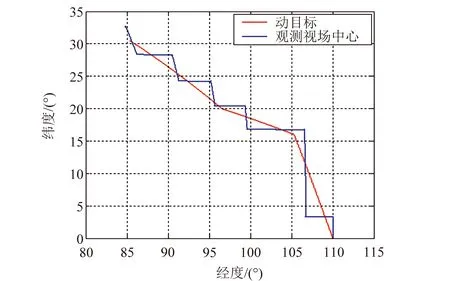
圖6 動目標軌跡與觀測視場中心變化曲線Fig.6 Change curves for moving target trajectory and center of visual field range
由圖6可知,經過11次姿態機動實現觀測視場中心的變換,成功實現了對動目標的跟蹤,使動目標始終處于觀測視場范圍內。若采用目標快要出當前觀測視場時通過姿態機動將當前目標位置再次作為觀測視場中心的跟蹤策略,則至少需要經過20次姿態機動。仿真結果表明:本文所設計的動目標跟蹤策略能夠節省姿態機動的次數,并很好地實現對動目標的跟蹤成像。
3 結束語
本文針對高軌光學成像衛星對動目標的跟蹤需求,綜合考慮衛星姿態機動能力、能源消耗等,提出一種方形觀測視場的高軌光學成像衛星動目標跟蹤策略。該策略在地面設置虛擬的觀測視場九宮格,通過計算動目標位置與中心觀測視場邊界的距離并判斷動目標運動趨勢,可以明確衛星調整視軸指向的時機及需要指向的視軸中心,通過合理設計相鄰觀測視場的重疊覆蓋寬度,在最大限度地利用觀測視場范圍、減少視軸指向調整次數的同時,避免了由于觀測視場因素導致的動目標跟蹤丟失。通過搭建動目標跟蹤策略仿真系統,對跟蹤策略的有效性進行仿真驗證。仿真結果表明:相較于使相機視軸持續指向動目標的策略,以及動目標每次臨近越出觀測視場范圍就調整指向使其重新處于觀測視場中心的策略,本文提出的策略能夠通過更少的姿態機動次數實現對動目標的連續跟蹤。不過,由于本文在設計相鄰觀測視場重疊覆蓋寬度時,均是以衛星能跟蹤的最大運動速度為基礎,當實際所跟蹤的動目標運動速度大大小于最大跟蹤速度指標時,仍然會有一定的觀測視場利用率損失。后續可以針對動目標運動速度實現對相鄰觀測視場覆蓋寬度的自適應調整設計,以更大限度地實現觀測視場利用率,減少視軸指向調整次數。
猜你喜歡
教學考試(高考化學)(2021年2期)2021-05-30 06:15:52
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:42
中學生數理化·高一版(2020年3期)2020-04-21 08:03:20
中學生數理化(高中版.高考理化)(2020年2期)2020-04-21 05:32:50
小學生作文(低年級適用)(2019年9期)2019-10-08 08:37:10
小學生作文(低年級適用)(2018年9期)2018-10-08 02:29:48
中學生數理化·七年級數學人教版(2018年6期)2018-06-26 08:36:10
數學大世界(2018年1期)2018-04-12 05:39:14
幸福(2017年18期)2018-01-03 06:34:53
中國衛生(2016年8期)2016-11-12 13:26:50