重型顱腦外傷術后重癥肺炎的臨床特點及危險因素分析
2021-09-17 06:11:36潘小濱石松長莊穎峰林興盛
吉林醫學 2021年9期
林 建,潘小濱,石松長,莊穎峰,林興盛
(福建省立金山醫院重癥醫學一科,福建 福州 350007)
重型顱腦外傷是當今外科常見急癥之一,其往往需要手術治療[1]。而外科術后肺部感染是影響療效的重要因素,特別是重癥肺炎,相關研究提示,重型顱腦外傷的術后肺部感染率高[2]。本文探討重型顱腦外傷后重癥肺炎的危險因素,為重型顱腦外傷術后重癥肺炎的預防提供臨床依據。
1 資料與方法
1.1一般資料:本研究選擇2018年7月~2020年12月福建省立金山醫院重癥醫學科收住的重型顱腦外傷術后患者87例作為研究對象,其中男62例,女25例。排除標準:①患有社區獲得性肺炎,即入院前即存在或48 h內發生者;②患者于入院48 h內出/轉院或死亡者。將其中發生院內重癥肺炎的35例患者作為觀察組,未發生的52例為對照組。
1.2方法
1.2.1資料采集:采用回顧性調查法,查閱病案資料,收集患者的一般信息、病程記錄、化驗單、特殊檢查、微生物學檢驗報告等資料。分析主要臨床表現和痰培養病原菌譜。比較兩組患者性別比例、年齡、吸煙史、心肺疾病史、侵入性操作、GCS評分、手術時間及機械通氣時間等方面的差異。本次研究經過本院醫學倫理委員會同意。
1.2.2診斷標準
1.2.2.1重型顱腦損傷診斷標準:①廣泛顱骨骨折、腦挫裂傷、腦干損傷或顱內血腫;②深昏迷12 h以上,意識障礙逐漸加重或出現再昏迷;③有明顯的陽性體征;④體溫、呼吸、脈搏、血壓有明顯改變[3]。
1.2.2.2術后重癥肺炎診斷標準:參照美國疾病預防與控制中心的手術后重癥肺炎診斷標準:①意識障礙;②呼吸頻率>30次/min;③PaO2<60 mm Hg(1 mm Hg=0.133 3 kpa),PaO2/FiO2<300 mm Hg,需行機械通氣治療;④血壓<90/60 mm Hg;⑤胸片顯示雙側或多肺葉受累;⑥尿量<20 ml/h或<80 ml/4 h,或急性腎功能衰竭需要透析治療等[4]。
2 結果
2.1臨床表現:試驗組中35例,根據重癥肺炎診斷標準,其中出現意識障礙和需機械通氣者35例,占比100%;呼吸頻率30>次/min者28例,占比80%;PaO2<60 mm Hg者30例,占比85.7%;血壓<90/60 mm Hg者11例,占比31.4%;尿量<20 ml/h或<80 ml/4 h者18例,占比51.4%。
2.2細菌普分布:試驗組中35例中,分離出致病菌情況見圖1,其中革蘭陰性菌中常見者見圖2,革蘭陽性菌中常見病原體依次為金黃色葡萄球菌(12.1%)和表皮葡萄球菌(6.1%),4株真菌均為白色假絲酵母菌(12.1%)。
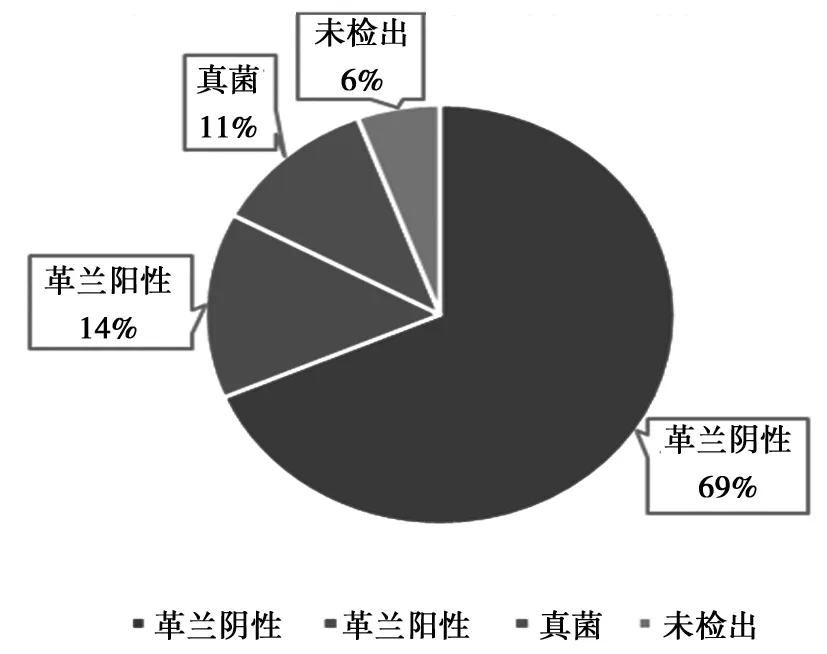
圖1 試驗組致病菌檢出情況
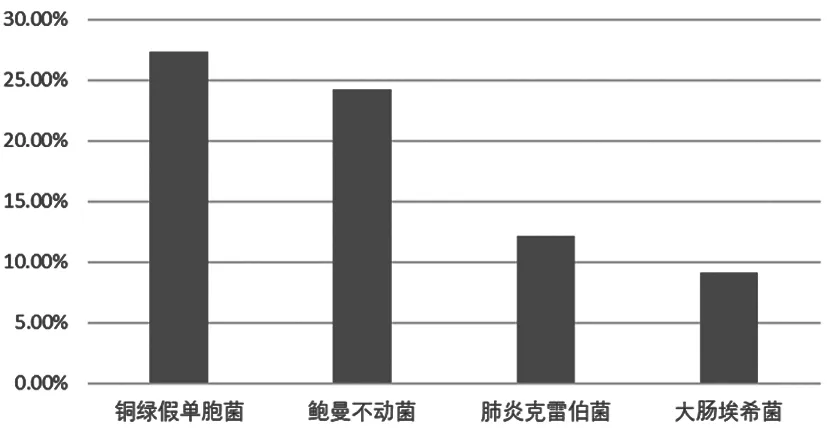
圖2 革蘭陰性菌常見分布
2.3危險因素分析:比較兩組臨床資料結果,見表1。將差異有統計學意義者納入Logistic回歸模型中進行多因素分析,結果顯示,侵入性操作、手術時間及機械通氣時間為術后重癥肺炎發生的獨立危險因素,見表2。

表1 兩組臨床資料比較
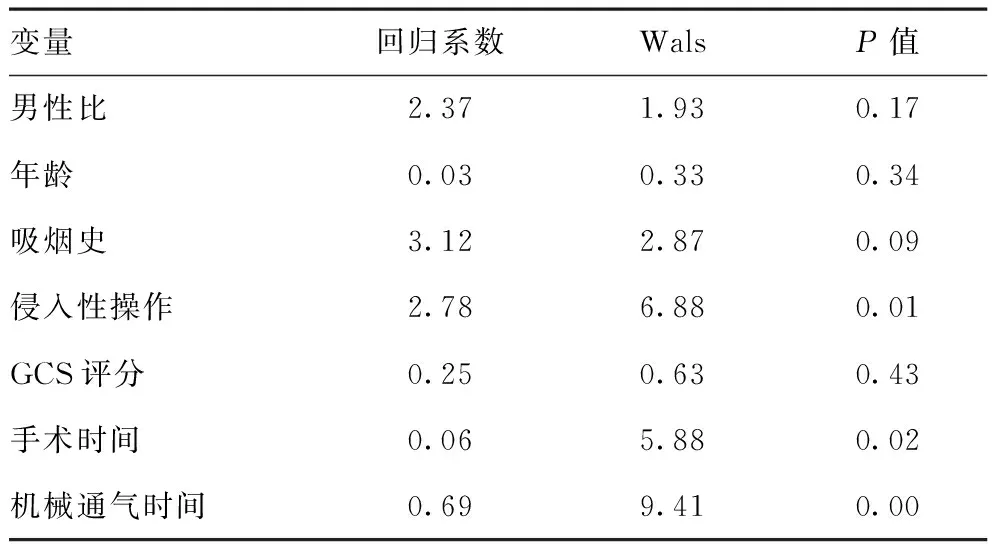
表2 重型顱腦外傷患者重癥肺炎危險因素的多因素分析
3 討論
重型顱腦外傷術后患者,因為病情重、臥床時間長、機械通氣概率高,重癥肺炎的發生率高[5]。且由于原發病重,其肺部感染早期癥狀易被掩蓋[6],故肺部感染容易進展成重癥肺炎,并嚴重影響患者的預后[7]。
文獻報道,術后重癥肺炎主要與患者男性比例、年齡、吸煙史、心肺疾病史、侵入性操作、GCS評分、手術時間及機械通氣時間相關[8-10],與本研究結果基本相符,但本研究中,重型顱腦外傷平均年齡較小,低于大部分文獻所報道,研究對象里,心肺疾病發病率低,存在偏倚,故心肺疾病并不作為高危因素。而且經多因素分析,具有統計學意義的為侵入性操作、手術時間及機械通氣時間。筆者認為,這主要是因為,侵入性操作及機械通氣,導致氣管黏膜嚴重受損,抵抗力明顯下降,利于致病菌的滋生;而手術時間長,患者麻醉、術中機械通氣時間相應延長,故容易發生重癥肺炎。當然,手術時間長者,病情往往較復雜,雖然無統計學差異,但可能存在一定的偏倚。
為此,對于預防或減少重型顱腦外傷患者術后重癥肺炎的發生,改善其預后,筆者認為可從以下幾方面考慮:①盡可能減少不必要的侵入性操作;②若病情允許,早期拔管,縮短機械通氣時間;③若病情允許,選取簡單術式,縮短手術時間;④醫務人員充分認識該類患者致病菌譜,早期發現術后肺炎,并進行相應的抗生素治療。
猜你喜歡
昆明醫科大學學報(2021年2期)2021-03-29 07:42:46
河北畫報(2020年10期)2020-11-26 07:20:50
電腦報(2020年35期)2020-09-17 13:25:53
當代工人(2020年8期)2020-05-25 09:07:38
電腦報(2019年40期)2019-09-10 07:22:44
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
科技知識動漫(2016年8期)2016-07-29 20:40:09
兒童故事畫報·發現號趣味百科(2015年12期)2016-01-25 00:41:49
中國衛生標準管理(2015年3期)2016-01-14 03:41:47
西南軍醫(2014年5期)2014-04-25 07:42:48