基于15單片機的電動門和電動停機坪控制
2018-09-20 03:16:32周松濤何澤文馬奔
價值工程 2018年29期
周松濤 何澤文 馬奔
摘要:本設(shè)計來自廣東大學生科技創(chuàng)新培育專項資金(攀登計劃)支持項目——無人機無線充電系統(tǒng)的研究與開發(fā)。本論文著重論述無人機無線充電站的電動門和電動停機坪的功能和實現(xiàn)。設(shè)計系統(tǒng)以IAP15W4K58S4單片機為處理器,使用42兩相混合式步進電機和直流電機提供動力,用螺桿將電機角位移轉(zhuǎn)換成線位移,實現(xiàn)控制物體的動作變化。本系統(tǒng)電路簡單、調(diào)試方便、成本低廉,與無線充電系統(tǒng)相互獨立,可以直接用作其他系統(tǒng)的機械結(jié)構(gòu),具有一定的實用價值。
Abstract: This design is a special fund (climbing program) to support Guangdong university students' scientific and technological innovation cultivation—Research and Development of Wireless charging system for UAV. This paper focuses on the function and realization of the electric gate and the electric apron of the wireless charging station of UAV. The design system is based on IAP15W4K58S4 single chip microcomputer,using 42 two-phase hybrid stepping motor and DC motor to provide power, converting the angular displacement of the motor into a linear displacement with a screw, and controlling the movement change of the object. The system has the advantages of simple circuit, convenient debugging and low cost, and is independent of the wireless charging system. It can be directly used as mechanical structure of other systems and has certain practical value.
關(guān)鍵詞:IAP15W4K58S4;步進電機;直流電機
Key words: IAP15W4K58S4;stepping motor;DC motor
中圖分類號:TM33 文獻標識碼:A 文章編號:1006-4311(2018)29-0161-03
0 引言
電動門系統(tǒng)主要是指由單片機控制以及電機驅(qū)動的一種開關(guān)門機構(gòu),電動停機坪是指由單片機控制以及電機驅(qū)動的一種電動運輸平臺。在日常生活中,經(jīng)常可以看到各種電動門系統(tǒng),例如銀行的感應(yīng)門。這些電動門在人接近時打開,人離開后關(guān)閉,可以快速實現(xiàn)兩個空間的隔離。電動運輸平臺常應(yīng)用于工廠里的產(chǎn)品移動。這些運輸平臺,在短距離移動產(chǎn)品的處理上,擁有快速高效、平穩(wěn)安全和運輸量大的特點。本設(shè)計使用一個15單片機控制了上述兩套系統(tǒng),為無人機無線充電項目創(chuàng)造了與周圍環(huán)境隔離的充電艙和安全平穩(wěn)的電動停機坪。
1 總體方案設(shè)計
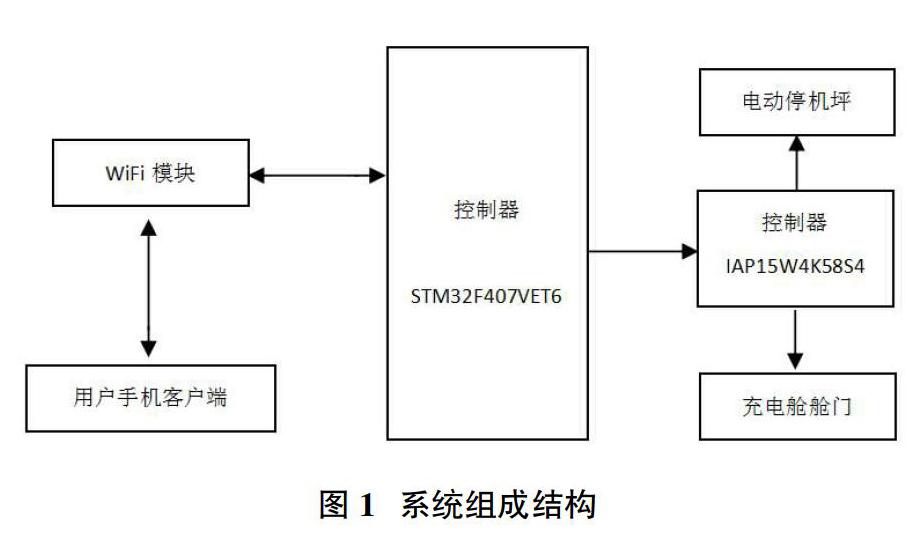
該設(shè)計以IAP15W4K58S4單片機為控制核心,實現(xiàn)控制電動門開關(guān)和電動停機坪進出充電艙的功能。通過單片機的P1口檢測來自STM32的控制信號,將用戶的操作命令轉(zhuǎn)變成步進電機和直流的定向轉(zhuǎn)動,實現(xiàn)系統(tǒng)規(guī)定的動作。系統(tǒng)組成方框圖如圖1所示。
2 系統(tǒng)主要硬件模塊介紹
2.1 IAP15W4K58S4單片機
IAP15W4K58S4,是當今使用廣泛的機器周期為1T的單片機,比12T 的單片機執(zhí)行速度快 12倍,擁有低速模式、空閑模式、掉電模式和停機模式四種模式,工作電壓2.5V至5.5V,是運算速度高、可靠性強、環(huán)保節(jié)能、不懼怕各種干擾的8051 單片機,采用宏晶專利的第八代加密技術(shù),下載的程序保密性好,而且指令兼容傳統(tǒng)51單片機,使用者可以維持原來的開發(fā)習慣。
2.2 42兩相混合式步進電機
步進電機是將來自控制芯片的高低電平變化轉(zhuǎn)換成相應(yīng)的角位移電動機,而且是一種開環(huán)控制的電動機。每當步進電機接收到一個脈沖激勵信號,電機轉(zhuǎn)子就會轉(zhuǎn)動,轉(zhuǎn)過的距離被稱作步角距,步距角的大小由步進電機自身規(guī)格型號決定。使用步進電機的關(guān)鍵在于脈沖信號,使用者通過設(shè)置它的個數(shù)和頻率,來控制電機的角位移量和速度。因此只要經(jīng)過簡單的計算,就能準確給電機定位和控制電機快慢。步進電機分類方法很多,以產(chǎn)生力矩的方式劃分可以分為反應(yīng)式、永磁式和混合式三種。
本設(shè)計使用的是42兩相混合式步進電機。這類步進電機的轉(zhuǎn)子使用永磁性材料制成并且做成齒形,電機定子結(jié)構(gòu)與反應(yīng)式步進電機的定子類似并且有齒,能集合反應(yīng)式步進電機和永磁式步進電機的優(yōu)點,步距角小,精度高,當相同的脈沖激勵信號時,混合式步進電機產(chǎn)生的轉(zhuǎn)矩大于反應(yīng)式步進電機,所以混合式步進電機的應(yīng)用最為廣泛。
2.3 直流減速電機
直流減速電機,是在直流電機的基礎(chǔ)上,為適應(yīng)大扭矩輸出的要求加工而成。直流電機是將電能轉(zhuǎn)化為機械能的機器,電機內(nèi)部有永磁體,一旦電機通電,電機的線圈就產(chǎn)生安培力,推動轉(zhuǎn)子轉(zhuǎn)動。通過電機前段的換向器,保持電機的轉(zhuǎn)向不變。
在直流電機的后段加裝齒輪減速箱,就是直流減速電機。齒輪減速箱內(nèi)部有多個不同大小的齒輪,利用齒輪傳動的作用,逐級降低電機輸出速度,實現(xiàn)較大的力矩輸出。為使項目的無人機平穩(wěn)的進出充電艙,兼顧運輸平臺的速度和拉力,我們選擇輸出轉(zhuǎn)速每份鐘50轉(zhuǎn)的、輸出力矩8千克厘米的24伏直流減速電機。
2.4 直流電機正反正反轉(zhuǎn)控制模塊
本設(shè)計使用正反轉(zhuǎn)模塊,實現(xiàn)電機的轉(zhuǎn)動控制。單片機的P3口與模塊的電機控制端組成回路,利用低電平觸發(fā),能有效控制模塊的輸出端的電流方向,實現(xiàn)電機的正反轉(zhuǎn)。在運輸平臺下安裝四個電機和輪子,在單片機編程上設(shè)計四個輪子的轉(zhuǎn)動方式,可以實現(xiàn)電動停機坪的進出艙控制或者轉(zhuǎn)向。
3 軟件部分的設(shè)計
3.1 主程序設(shè)計
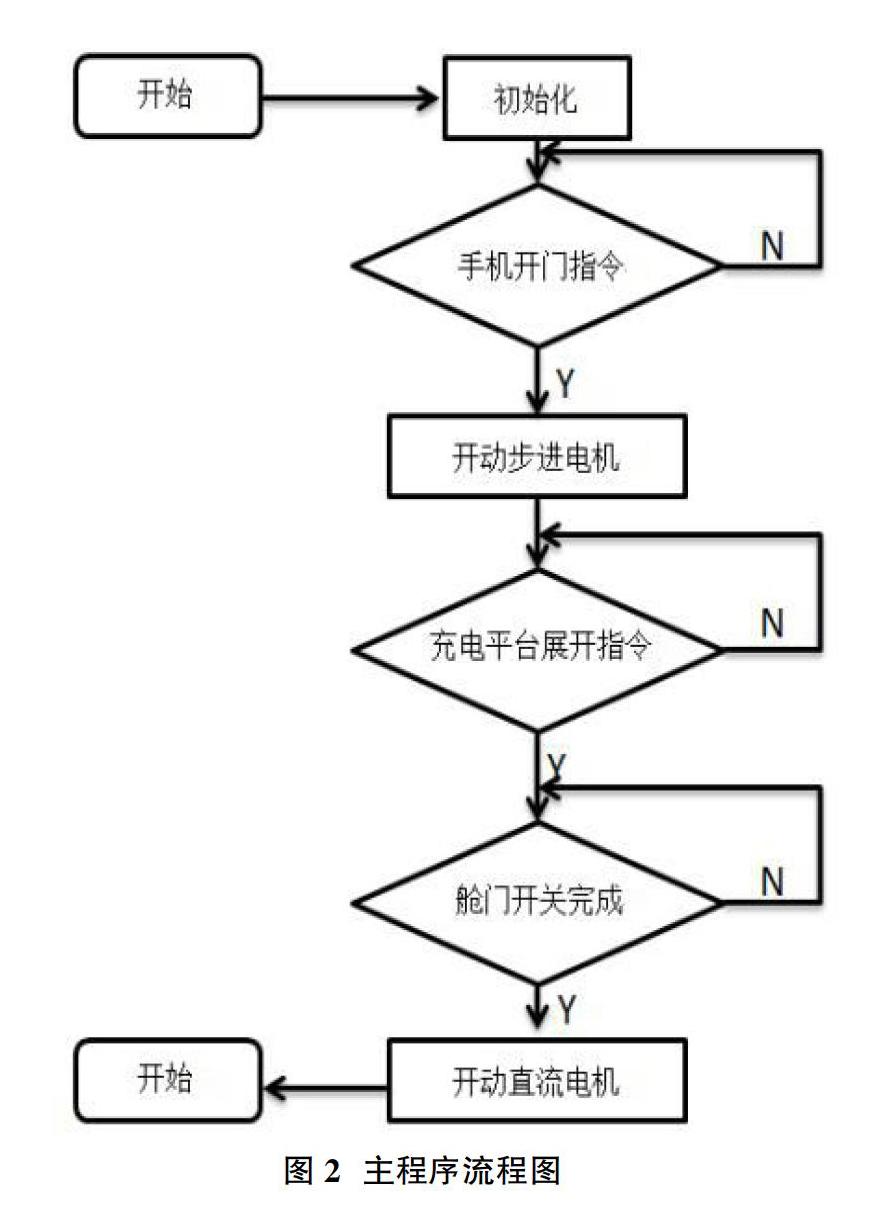
本設(shè)計對程序的框架,根據(jù)功能的不同劃分了不同的模塊,逐個模塊編程調(diào)試,最終把各個子模塊有序的連接起來,構(gòu)成總的程序。主程序流程圖如圖2所示。
主要源程序如下:
int main(void)
{
IO_Init();
RLED = LED_OFF;
GLED = LED_OFF;
BLED = LED_OFF;
APP = LED_OFF;
Drive_tingctrl();
P27 = 1;
P26 = 1; //電機使能信號
while(1)
{
if(P10==1)); //接收stm32發(fā)送的信號
{
GLED = LED_NO; //只開綠燈
motor_ctrl(FALL); //PB0,P05綠燈開門
GLED = LED_OFF;
}
if(P11==1)); //接收stm32發(fā)送的信號
{
BLED = LED_NO; //只開藍燈
motor_ctrl(FALL); //PB1,P06藍燈開門
BLED = LED_OFF;
}
if(P12==1)); //接收stm32發(fā)送的信號
{
RLED = LED_NO; //同時開紅燈和綠燈
GLED = LED_NO;
Drive_chuctrl(); /出艙
RLED = LED_OFF;
GLED = LED_ OFF;
}
if(P13==1)); //接收stm32發(fā)送的信號
{
RLED = LED_NO; //同時開紅燈和綠燈
GLED = LED_NO;
Drive_jinctrl() //進艙
RLED = LED_OFF;
GLED = LED_ OFF;
}
}
}
3.2 步進電機程序設(shè)計
42兩相混合式步進電機,步距角1.8度,步進電機轉(zhuǎn)動一周360度,所以200個脈沖激勵信號可以使電機轉(zhuǎn)動一圈。步進電機上的螺桿為T8型螺桿,導程2毫米,螺母在這種螺桿上轉(zhuǎn)一圈所發(fā)生的位移是2毫米。考慮到電動門的完全展開為1000毫米,單個步進電機的動作計算應(yīng)為:S=d·n,其中d為螺桿導程;n為步進電機轉(zhuǎn)動圈數(shù)。
為了方便計算單片機輸出的激勵信號數(shù)量,步進電機轉(zhuǎn)動圈數(shù)應(yīng)轉(zhuǎn)換為激勵信號數(shù)量i表示,他們之間的關(guān)系是:n=?琢·i。將實際數(shù)值帶入計算,i取值50000,在調(diào)試過程中再作修改,部分程序如下:
void motor_ctrl(u8 dir)
{
u16 i = 50000;
if(dir)
{
DIR1 = FALL;
DIR2 = FALL;
}
else
{
DIR1 = UP;
DIR2 = UP;
}
while(i--)
{
PUL1 = 1;
PUL2 = 1;
DelayUS(DELAY_TIME);
PUL1 = 0;
PUL2 = 0;
DelayUS(DELAY_TIME);
}
}
3.3 直流電機程序設(shè)計
在這里,重申本系統(tǒng)使用的直流電機的參數(shù)。直流減速電機,工作電壓24伏,空載轉(zhuǎn)速50轉(zhuǎn)每分鐘,空載電流0.13安倍,負載轉(zhuǎn)速45轉(zhuǎn)每分鐘,負載電流0.62安倍,額定力矩8千克厘米。電動停機坪的輪胎直徑65毫米,那么電動停機坪進出艙的運動計算是:。
將實際數(shù)值代入計算,得出時間t取值為5.876秒,編程取值6秒,部分程序如下:
void Drive_jinctrl(void)
{
zhengzhuan1 = 0;
zhengzhuan2 = 1;
zhengzhuan3 = 1;
zhengzhuan4 = 0;
fanzhuan1 = 1;
fanzhuan2 = 0;
fanzhuan3 = 0;
fanzhuan4 = 1;
DelaySEC(time); //讓電機持續(xù)轉(zhuǎn)動
Drive_tingctrl(); //停電機
}
void Drive_chuctrl(void)
{
zhengzhuan1 = 1;
zhengzhuan2 = 0;
zhengzhuan3 = 0;
zhengzhuan4 = 1;
fanzhuan1 = 0;
fanzhuan2 = 1;
fanzhuan3 = 1;
fanzhuan4 = 0;
DelaySEC(time); //讓電機持續(xù)轉(zhuǎn)動
DelayMS(500);
Drive_tingctrl(); //停電機
}
4 軟硬件聯(lián)合調(diào)試
本設(shè)計的編程軟件是在Keil C。Keil u Vision5 軟件支持89C51單片機的C語言的編程及調(diào)試,運用非常方便,有效提高了編程制作效率。根據(jù)本次系統(tǒng)的軟件構(gòu)思,因為螺桿和輪胎等機械結(jié)構(gòu)的實際特性不好仿真,所以程序的調(diào)試全部在機械結(jié)構(gòu)實物搭建起來后進行。步進電機和直流電機的控制關(guān)鍵在時間,軟件調(diào)試過程,就是測試上面計算的數(shù)值是否合適的過程。
在硬件調(diào)試方面,首先根據(jù)硬件電路圖檢查了各個器件的型號、規(guī)格、參數(shù)是否正確;第二步,檢查原理圖與所用器件的引腳是否吻合,進而排除邏輯上的錯誤;第三步,使用萬用表等工具檢查硬件電路的接線,檢查有無短路、虛焊或者開路的現(xiàn)象;第四步,設(shè)備按照不同的功能分別接通電源,檢查時各個器件運行時有無發(fā)熱失控等不良現(xiàn)象,整個系統(tǒng)的功能是否符合要求。
在機械結(jié)構(gòu)實物的調(diào)試中,發(fā)現(xiàn)原來用作固定步進電機的4毫米PVC板硬度不足,這種板材不能為工作中的步進電機提供足夠的支撐,不能承受開關(guān)門的作用力,導致電動門調(diào)試中容易出現(xiàn)錯位或者晃動,威脅了系統(tǒng)中其他器材的安全。為此我們使用木頭對板材進行加固,加固后的電動門運行正常,但使用一種更堅硬的材料來承受步進電機的作用力是最好的辦法。
5 結(jié)論
本設(shè)計以IAP15W4K58S4單片機為主控芯片,實現(xiàn)對無人機無線充電站的門控和承重平臺的設(shè)計,與無線充電站的其他功能不在一塊控制器上執(zhí)行,程序具有一定的獨立性和可移植性。該電路具有成本低廉、結(jié)構(gòu)簡單、反應(yīng)速度快等優(yōu)點,可以廣泛應(yīng)用于開關(guān)門控制和自動化物流等需要隔離和運載的領(lǐng)域。
參考文獻:
[1]陳東平.基于單片機的電機控制電路改造[J].科技信息, 2010(04):392-394.
[2]黃贊.基于AT89C51單片機的步進電機伺服系統(tǒng)設(shè)計[J].機床與液壓,2004(03):48-49,56.
[3]K. N. King. C語言程序設(shè)計現(xiàn)代方法第[M].二版.北京:人民郵電出版社,2010.
[4]張偉.單片機原理及應(yīng)用[M].西安:機械工業(yè)出版社,2002.
[5]宋錦河.步進電機控制系統(tǒng)的快速實現(xiàn)[J].鄂州大學學報,2004(04):4-7.
[6]王成元,侯曦瑞,夏加寬.輪式機器人用直接驅(qū)動電機的設(shè)計[J].沈陽工業(yè)大學學報,2008(02):121-124,138.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
電子制作(2018年11期)2018-08-04 03:25:42
電子制作(2018年12期)2018-08-01 00:47:44
制造技術(shù)與機床(2017年6期)2018-01-19 02:41:21
電子制作(2017年19期)2017-02-02 07:08:38
當代化工研究(2016年6期)2016-03-20 16:21:46
