多無人機的組群飛行特性與控制分析
2018-09-20 10:17:18高祖宇陳俊超
無線互聯(lián)科技 2018年12期
關(guān)鍵詞:機器學(xué)習(xí)無人機
高祖宇 陳俊超
摘要:多無人機的組群飛行可以實現(xiàn)復(fù)雜狀況下的作業(yè),提升工作效率,但由于無人機自身的特殊性,這一工作方式也存在一些弊端。基于此,文章以多無人機的組群飛行特性作為切入點,簡述通信干擾、航道重疊等問題。再以此為基礎(chǔ),重點論述多無人機的組群飛行的控制,并通過模擬實驗證明控制策略的可行性,以期通過分析明晰問題、優(yōu)化理論,為后續(xù)多無人機聯(lián)合作業(yè)提供參考。
關(guān)鍵詞:無人機;組群飛行;多址共道;跟蹤算法;機器學(xué)習(xí)
無人駕駛飛機(Unmanned Aerial Vehicle,UAV),簡稱無人機,是利用無線電遙控設(shè)備和自備的程序控制裝置操縱的不載人飛機,也可由車載計算機完全、間歇地自主操作。無人機在一些特殊工作領(lǐng)域的應(yīng)用價值突出,多無人機組群飛行則能夠避免單架無人機效率比較低、工作空間小、視角有限等不足,可以充分采集一些重要的目標(biāo)和信息,分析多無人機的組群飛行特性與控制有突出的現(xiàn)實意義。
1 多無人機的組群飛行特性
1.1 通信干擾
無人機往往通過無線通信的方式進行操作、傳輸信息,這種通信方式便捷有效,在單無人機的通信活動中可用性較高,但在多無人機組群飛行時,所有無人機是同步進行通信工作的,而且往往只有一個接收端,信號干擾的情況較為嚴重。在此前德國學(xué)者的研究中,當(dāng)4架以上無人機同步傳輸信號時,失真率往往超過5.3%,如果存在干擾,失真率會飆升至25%以上,相應(yīng)的,單無人機的通信即便面臨干擾(同等級別),失真率也一般不會超過10%,應(yīng)對通信干擾是多無人機組群飛行需要考慮的首要問題。
1.2 航道重疊
航道重疊問題在多無人機組群飛行中較為多見,大部分無人機屬于感應(yīng)式,在組群飛行時存在相互干擾的問題,設(shè)計人員針對無人機特點進行了默認程序改造,可以保證多無人機避免嚴重的不協(xié)調(diào)飛行,但航道重疊問題依然沒有完全解決,當(dāng)組群的無人機數(shù)目超過3架時,就可能導(dǎo)致碰撞,如果組群飛行的無人機超過4架,平均每飛行495 m、垂直爬升247 m,就有可能出現(xiàn)一次碰撞,甚至導(dǎo)致無人機損壞。
1.3 反應(yīng)滯后
反應(yīng)滯后并不是簡單的通信延遲問題,多無人機的組群飛行需要面臨較單無人機更復(fù)雜的周邊環(huán)境,這種復(fù)雜變化與通信有關(guān),也與周邊其他無人機有關(guān)。如某類無人機長期執(zhí)行航拍作業(yè),在此前的工作中鎖定對象為固定目標(biāo),集中4架無人機進行組群飛行,在飛行過程中,無人機面臨動態(tài)目標(biāo)(其他無人機)的影響,如果其默認程序中缺乏可以與動態(tài)目標(biāo)相匹配的模型,或者匹配度不高,無人機可能不會發(fā)生規(guī)避動作,導(dǎo)致碰撞,這一問題是目前無人機組群飛行的主要負面特征之一。
2 多無人機的組群飛行控制
2.1 應(yīng)用多址共道通信技術(shù)
為應(yīng)對多無人機組群飛行中的通信干擾,提出多址共道通信技術(shù),該技術(shù)的核心原理是將群組中無人機的通信活動分為不同地址,應(yīng)用相同頻段的一個或者幾個信道進行傳輸,當(dāng)接收端完成信號的接受后,對信號進行分離,再進行提純和放大,甄別信號中的信息內(nèi)容,避免多無人機組群飛行的通信干擾。如在進行探測時,派出了4架無人機組群飛行,飛行過程中,以每秒為間隔不斷傳輸偵測所獲內(nèi)容,將不同傳輸?shù)刂啡谌?個固定信道中,1號信道比特率為16 kbps,2號信道比特率為17 kbps,通信活動同步進行4架無人機的信號頻率分別為 1 000 Hz,1200 Hz, 1 400 Hz,1 500 Hz。接收端完成信號接收后,直接應(yīng)用信號分離器和信號放大器對兩個信道內(nèi)的信號進行分離、提純,獲取信息后再進行核對,綜合獲取最佳通信結(jié)果。
2.2 應(yīng)用動態(tài)模型跟蹤算法
多無人機組群飛行的負面特征之一是存在航道重疊問題,對該問題進行分析,可以發(fā)現(xiàn)其根本原因是對跟蹤算法的敏感性不強。我國無人機發(fā)展的早期跟蹤算法就得到了重視,但當(dāng)時的跟蹤算法只能針對勻速目標(biāo)進行,而且目標(biāo)的外形也必須是近似規(guī)則的,這在現(xiàn)實工作中幾乎沒有價值。后續(xù)研究中,針對非勻速和不規(guī)則目標(biāo)的追蹤漸漸得到重視,其在無人機中具體應(yīng)用的方式為多尺度核相關(guān)濾波跟蹤算法,多尺度算法將不同速度、不同外觀的跟蹤融合在一起,使無人機的辨識能力大大增加[1]。
假定2架無人機處于飛行工作中,以A無人機的訓(xùn)練為例,目標(biāo)對象為B無人機,B無人機速度帶有變化性,外觀也處于非規(guī)格狀態(tài)。訓(xùn)練過程中,將A的速度變化設(shè)為一個數(shù)集,數(shù)集中含有B無人機可能出現(xiàn)的速度變化類型,該數(shù)集可以表達為:
[S1,S2,S3,S4,S5,……Sn]
數(shù)集中每—個數(shù)字都表達—個可能出現(xiàn)的速度。再將B無人機的外觀特點制作為一個數(shù)集,該數(shù)集可以表達為:
[O1,O2,O3,O4,O5,……On]
數(shù)集中每一個數(shù)字都表達一個獨特的外觀特點。完成數(shù)集構(gòu)建后,將對應(yīng)信息代入到A無人機的訓(xùn)練中,當(dāng)A,B兩架無人機組群飛行時,A無人機可以通過傳感器感知B無人機的速度和外觀狀況,與默認程序中速度數(shù)集和外觀數(shù)集的模型進行匹配,數(shù)集中的樣本越多,匹配度越高,無人機可以實現(xiàn)自動規(guī)避,避免航道重疊問題。
2.3 進行大規(guī)模機器學(xué)習(xí)
在動態(tài)模型跟蹤算法下,可以收集若干數(shù)據(jù),這些數(shù)據(jù)如果采用傳統(tǒng)方式進行輸入、訓(xùn)練,會消耗較多時間,而且樣本本身也難以與無人機的速度、外觀情況實現(xiàn)精準(zhǔn)匹配。為了提升訓(xùn)練效果、降低航道重疊、無人機反應(yīng)滯后和碰撞問題,提出大規(guī)模機器學(xué)習(xí)的基本方案,所用學(xué)習(xí)方法為K近鄰算法和隨機森林法。
K近鄰算法下,將不同維度(假定為速度和外形)的樣本進行最大限度的收集,樣本數(shù)越多,訓(xùn)練效果越理想。在速度維度下,選取若干標(biāo)準(zhǔn)的K點,如每秒5m、每秒5.1m、每秒5.2m、每秒5.3m……直到標(biāo)準(zhǔn)值數(shù)滿足基本工作要求,將這些K點投入在訓(xùn)練區(qū)域中,再將選取的樣本投入到訓(xùn)練區(qū)域內(nèi),樣本的速度值要求更加精確,達到每秒5.01 (小數(shù)點后至少2位)的水平。樣本投入后,所有樣本會自行尋找與自身特點(速度值)最接近的K值,完成一輪訓(xùn)練[2]。將訓(xùn)練結(jié)果輸入到無人機控制系統(tǒng)中,在A,B兩架飛機的組群飛行中,B無人機出現(xiàn)速度變化,A無人機通過傳感器感知速度類型,與默認系統(tǒng)中的模型進行匹配,判斷其屬于正常加速,不進行動作,組群飛行即可繼續(xù)進行,免去碰撞、航道重疊等問題。隨機森林法與K近鄰算法相似,也通過大量樣本收集進行科學(xué)、高效的機器學(xué)習(xí)。一個森林即一個訓(xùn)練區(qū)間,森林中的每一樹木都是一棵“決策樹”,決策樹即訓(xùn)練區(qū)間內(nèi)的標(biāo)準(zhǔn)參數(shù)。投入樣本后,所有決策樹對樣本進行識別,根據(jù)其特點判定樣本的類別,隨機森林法的訓(xùn)練效率取決于決策樹的數(shù)目,數(shù)目越多,訓(xùn)練效果越好,能夠直接提升無人機目標(biāo)辨別等工作的魯棒性[3]。
3 模擬實驗
3.1 模擬觀察指標(biāo)和參數(shù)
為驗證上述控制策略的可行性,研究人員進行了模擬實驗,選取4架螺旋槳無人機作為對象,進行航拍工作,設(shè)定每10 s為間隔進行一次通信傳輸作業(yè)。4架無人機的通信頻率分別為:1 000, 1 100, 1 200, 1 300 Hz;選取兩個傳輸信道,比特率分別為17和18 kbps,實驗過程中,人為控制無人機的爬升、變速、下降。在實驗前,應(yīng)用K近鄰算法和隨機森林法進行機器學(xué)習(xí),選取樣本4 811個,訓(xùn)練時間155 s(K近鄰算法)、167 s(隨機森林法)。觀察指標(biāo)為無人機通信信號可辨識率、飛行碰撞發(fā)生率和反應(yīng)時間。
3.2 模擬結(jié)果
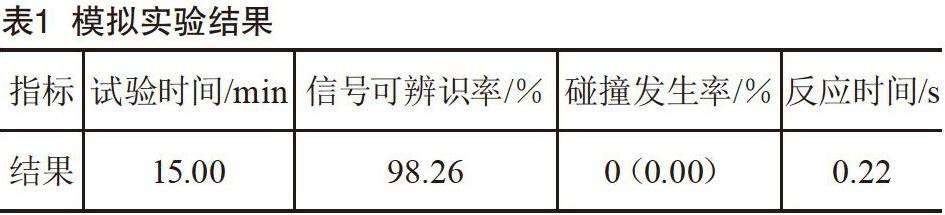
模擬共進行15 min,傳輸信號90次,觀察工作實時進行,反應(yīng)時間通過無人機內(nèi)置數(shù)字化感應(yīng)器記錄,完成試驗后直接讀取。實驗結(jié)果如表1所示。
結(jié)果上看,在15 min的實驗時間內(nèi),多無人機組群飛行得到了有效控制,通信信號的可辨識率達到98.2 6%,未發(fā)生碰撞情況,爬升、變速、下降等作業(yè)的反應(yīng)時間平均為0.22 s,能夠滿足大部分工作的需求,這表明上述各項控制策略是可行的。
3.3 結(jié)果分析
結(jié)合實驗結(jié)果可以發(fā)現(xiàn),多無人機的組群飛行雖然帶有一些負面特性,但并非完全不可控制,應(yīng)在執(zhí)行多無人機組群飛行前,針對存在的問題進行分析,并充分應(yīng)用現(xiàn)代控制理論、智能技術(shù)加以應(yīng)對。本質(zhì)上看,無人機是自動化技術(shù)發(fā)展的產(chǎn)物,其未來應(yīng)用范圍也會更加廣泛,進一步探索現(xiàn)代技術(shù)的聯(lián)合應(yīng)用、集成、嵌入,是提升無人機性能的主要方式。如上文所述的傳感器技術(shù)、單片機技術(shù)、通信技術(shù)等,由于環(huán)境受限,本次研究沒有考慮電磁干擾等問題,后續(xù)工作中如果條件允許也應(yīng)給予完善。
4 結(jié)語
通過分析多無人機的組群飛行特性與控制,獲取了相關(guān)理論成果。無人機在現(xiàn)代社會生產(chǎn)、生活中作用突出,多無人機的組群飛行帶有通信干擾、航道重疊、反應(yīng)滯后的特性,其控制優(yōu)化則可以借由多址共道通信技術(shù)、動態(tài)模型跟蹤算法和大規(guī)模機器學(xué)習(xí)實現(xiàn)。模擬實驗證明了上述控制策略的可行性。后續(xù)工作中,可以參考上述內(nèi)容完善多無人機的組群飛行控制,提升其工作能力。
[參考文獻]
[1]STMicro electronics.FCU評估板在貿(mào)澤開售讓無人機飛行控制設(shè)計輕[J].世界電子元器件,2018(1):33.
[2]段鎮(zhèn).無人機飛行控制系統(tǒng)若干關(guān)鍵技術(shù)研究[D].長春:中國科學(xué)院研究生院(長春光學(xué)精密機械與物理研究所),2014.
[3]尚何章,李春濤.基于Power PC的小型無人機飛行控制系統(tǒng)設(shè)計[J].伺服控制,2012(4):50-52, 64.
猜你喜歡
電子技術(shù)與軟件工程(2016年22期)2016-12-26 21:36:42
時代金融(2016年27期)2016-11-25 17:51:36
科教導(dǎo)刊(2016年26期)2016-11-15 20:19:33
人間(2016年26期)2016-11-03 17:52:40
中國科技博覽(2016年22期)2016-11-01 18:10:31
科技視界(2016年22期)2016-10-18 14:30:27
科學(xué)與財富(2016年28期)2016-10-14 21:19:17
科教導(dǎo)刊·電子版(2016年10期)2016-06-02 18:04:11
企業(yè)導(dǎo)報(2016年9期)2016-05-26 20:58:26
