臥式伺服缸新型結構控制系統的IMC-PID控制器設計
2018-09-21 11:39:16馬麗楠黃慶學馬強俊張文澤馬立峰韓賀永
太原理工大學學報 2018年5期
馬麗楠,黃慶學,2,馬強俊,張文澤,馬立峰,韓賀永
(1.太原科技大學 重型機械裝備協同創新中心,太原 030024;2.太原理工大學 機械工程學院,太原 030024)
由于在冶金等特殊生產線上,重載伺服缸需臥式鉸接安裝,旋轉一定的角度輸出曲線力,但由于缸筒自身重量的影響,會損壞密封結構,發生泄漏等現象,導致伺服缸輸出力不足,不僅嚴重影響到伺服缸的使用壽命,更嚴重影響配套設備的生產效率[1-3],因此,在臥式伺服液壓缸端底設計了一個支撐小缸的新型結構以及配套的壓力-位置雙閉環獨立PID控制系統。本文主要研究雙閉環獨立PID控制器參數整定多且復雜的問題,該控制系統需要同時整定6個參數,整定困難,易產生誤差,難以實現符合工況所需的精確穩定控制。
針對PID參數整定困難問題,國內外學者取得了很多顯著成就。SAMAKWONG et al[4]利用遺傳算法對PID控制器的參數進行優化,來提高伺服系統的控制性能,其仿真實驗證明了基于遺傳算法的PID控制器具有良好的控制性能,能夠提高控制系統的動態性能。SUNGTHONGA et al[5]針對熱風機的溫度控制,提出粒子群PID控制器設計,通過粒子群優化算法來優化PID參數,得到系統的最優性能,其仿真結果表明,經PSO優化的PID控制器相較于遺傳算法、Z-N算法等有著較好的效果。TOMERA et al[6]通過將蟻群算法應用于船舶轉向控制系統,對PID參數進行優化調整,其結果分析可以得到:該方法的控制效果良好,優于經典PID法、遺傳算法等。
劉勝等[7]針對傳統PID控制器參數整定過程繁瑣問題,提出一種采用搜索者優先算法的PID自整定方法,通過將改進的PID自整定算法應用于直流調速系統,得出該優化算法的控制效果更好,適用性更強。孫航等[8]在大型光電經緯儀速度環通過利用模糊控制器對PID的比例和微分系數進行自動調整,從而實現PID參數自整定,其仿真結構表明:模糊PID具有參數自整定的能力,并且仿真結果優于傳統PID.趙曉軍等[9]針對利用傳統的Z-N算法以及遺傳算法等得到的PID參數,難以獲得最優控制效果問題,提出基于果蠅優化算法的PID控制器設計,仿真結果表明:果蠅優化算法明顯優于Z-N算法和遺傳算法,具有收斂速度快,控制效果好等優點。
為了克服壓力-位置雙閉環獨立PID控制系統的參數整定困難問題,本文基于上述國內外研究提出IMC-PID控制器設計。與傳統PID控制器相比較,內模控制器具有結構簡單,可調參數少且整定簡單,魯棒性強等優點,將內模控制與PID相結合,可以克服PID參數整定困難等較多問題,提高控制系統的動態特性,優化系統的控制性能[10-11]。
1 新型結構設計原理
針對臥式伺服缸缸筒自身重量所產生的不良影響而導致伺服缸使用壽命縮短以及降低配套設備的生產效率等問題,設計了臥式伺服缸端底連接一個支撐小缸的新型結構及其配套的壓力-位置雙閉環控制系統[12-13]。其原理如圖1所示。
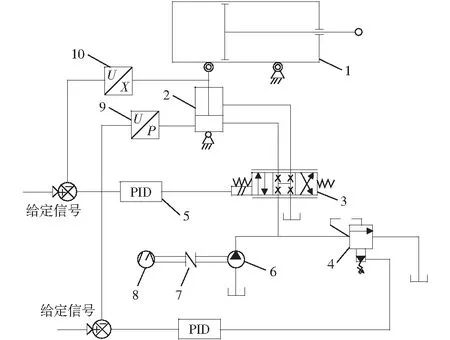
1—伺服缸;2—支撐小液壓缸;3—比例換向閥;4—比例溢流閥;5—控制器;6—液壓泵;7—聯軸器;8—電動機;9—壓力傳感器;10—位移傳感器圖1 新型結構控制原理圖Fig.1 Schematic diagram of new structure control
該控制系統是通過對小缸的壓力與位移進行獨立閉環控制,時刻跟蹤給定信號,來平衡掉臥式伺服缸缸筒自身的重量,避免活塞桿與導向套之間的摩擦力過大,破壞密封結構,使臥式伺服缸的活塞桿全程懸浮于導向套中,近似無摩擦做功。
2 IMC-PID控制器設計
2.1 IMC-PID控制設計原理
圖2所示為內模控制系統結構圖,其中r(s)為系統輸入,d(s)為系統擾動,y(s)為系統輸出。Q(s)、G(s)、M(s)分別為內模控制器、被控對象、過程模型。
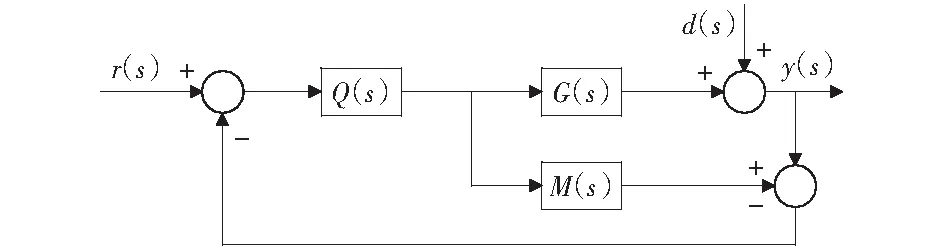
圖2 內模控制系統結構圖Fig.2 Internal model control system structure
通過內模控制原理分析,依據內模控制器設計過程,可知過程模型能夠分解為:
M(s)=M+(s)M-(s) .
(1)
式中:M+(s)為非最小相位,不可逆部分,包含了系統的右半平面零點以及時滯環節,M-(s)為穩定的最小相位,可逆部分。
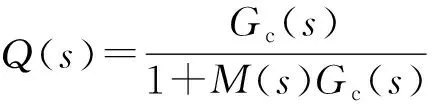
為了確保系統的穩定性和魯棒性,需要在最小相位部分加上濾波器,為此,內模控制器Q(s)可由下式設計出:

(2)
其中,f(s)為低通濾波器。
低通濾波器通用形式為:
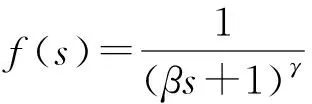
(3)
式中:β為濾波器參數,內模控制器中僅有的可調參數;γ為濾波器的階次。
通過對內模PID控制器設計方法進行分析研究,可將內模控制系統結構圖等效的轉換為反饋控制系統結構圖,如圖3所示,其中Gc(s)為反饋控制器。

圖3 內模控制等效反饋控制結構圖Fig.3 Internal model control equivalent feedback control structure
依據內模PID控制器的設計方法,由圖2所示的內模控制系統結構圖可得內模控制器為:
(4)
由圖3所示的反饋控制結構圖可得:

(5)
2.2 雙閉環控制系統的IMC-PID控制器設計
壓力-位置雙閉環控制系統具有一定耦合特性,通過解耦運算,分別得出[13]:
位置閉環控制系統的傳遞函數為:
X(s)=0.94×(1.38×10-10s5+6.49×10-8s4+
3.278 5×10-5s3+0.007 2s2+s)-1.
(6)
壓力閉環控制系統的傳遞函數為:
(7)
由于高階系統的控制器設計及仿真比較復雜,有時候甚至是不可實現的,因此,針對壓力-位置雙閉環控制系統的傳遞函數,運用次最優法模型降階法進行降階處理[14]。
降階后的帶有時間延遲的位置閉環控制系統傳遞函數:

(8)
降階后的帶有時間延遲的壓力閉環控制系統傳遞函數:
(9)
1) 針對降階后的位置閉環控制系統傳遞函數進行內模PID控制器設計,則:
(10)
濾波器選取:
(11)
得到反饋控制器如下:
(12)
為了使反饋控制器具有PID控制器的形式,用一階泰勒表達式逼近時滯項:
e-0.01s=1-0.01s.
(13)
則可得反饋控制器為:
(14)
2) 針對降階后的壓力閉環控制系統傳遞函數進行內模PID控制器設計,則:
(15)
同樣選取濾波器:
(16)
得到具有PID形式的反饋控制器如下:

(17)
3 IMC-PID控制器與PID的對比仿真
為了進一步驗證內模PID在位置控制系統中應用的優良性,與PID控制器進行對比分析,如圖4所示為位置控制系統的仿真對比模塊。
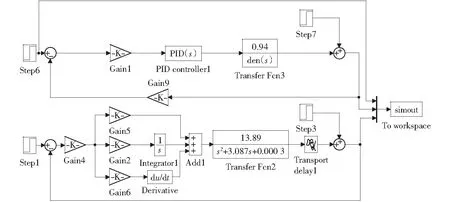
圖4 位置控制系統對比仿真Fig.4 Position control system contrast simulation
其仿真結果如圖5所示。
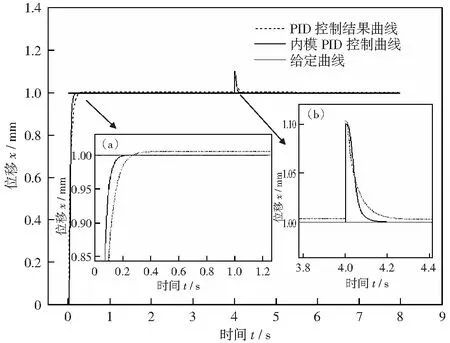
圖5 位置閉環對比仿真結果Fig.5 Position closed-loop contrast simulation
由部分放大圖5(a)可以看出基于內模PID控制的位置閉環相比較于PID優勢更加明顯,基本上在0.2 s后,位置曲線就能夠穩定的達到了目標值,而PID控制的位置曲線在0.4 s后才趨于穩定,接近于目標值,但并沒有精確到目標值。由部分放大圖5(b)可以看出,當加入擾動后,基于內模PID控制的位置閉環能夠在0.2 s的時間內快速、精確的回到目標值。而PID控制的位置曲線需要在0.3 s后才能穩定接近目標值,相比較內模PID有著明顯的劣勢。
為了進一步驗證內模PID在壓力控制系統中應用的優良性,與PID控制器進行比對分析,如圖6所示為壓力控制系統的仿真對比模塊。其仿真結果如圖7所示。
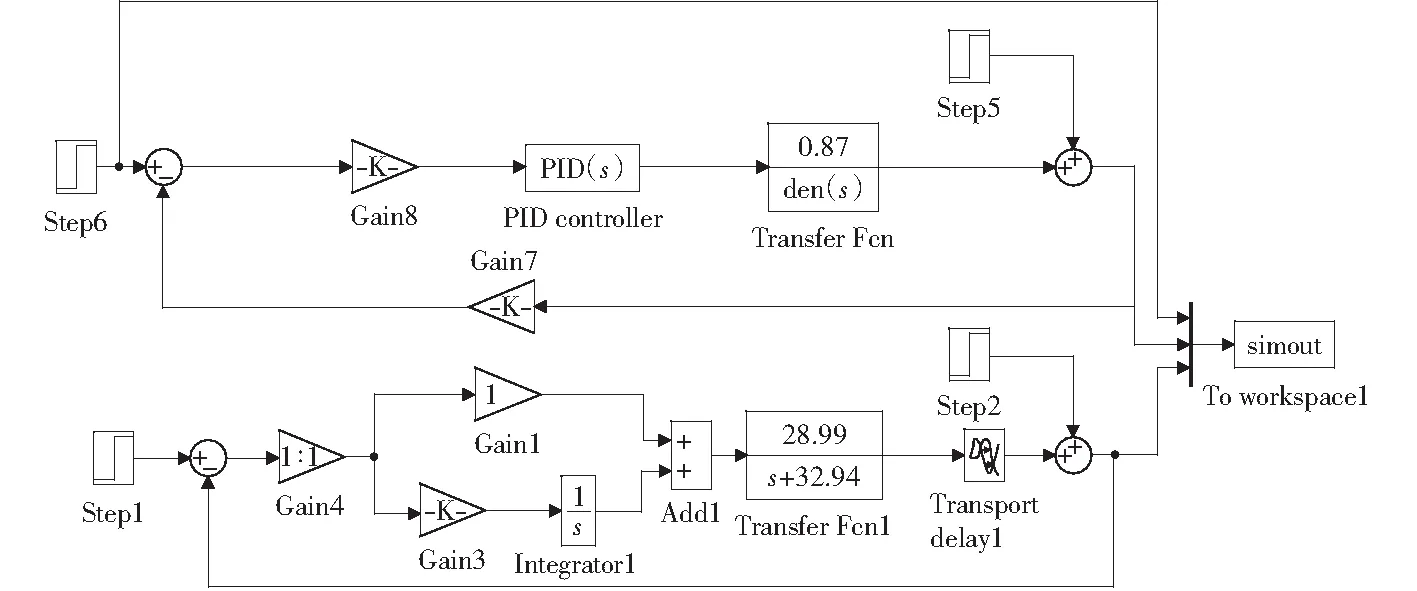
圖6 壓力控制系統對比仿真Fig.6 Pressure control system contrast simulation
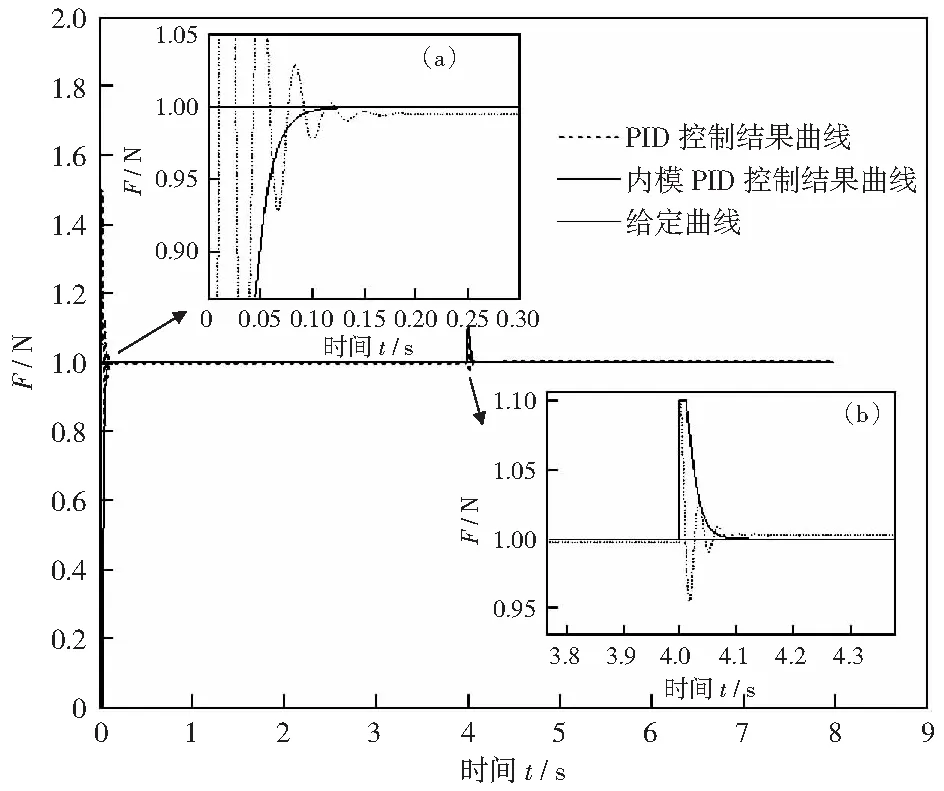
圖7 壓力閉環對比仿真結果Fig.7 Pressure closed-loop contrast simulation
由部分放大圖7(a)可以看出內模PID的控制效果明顯比PID好,內模PID控制的壓力曲線在0.1 s后就達到目標值,能夠保持穩定,沒有振蕩,而由PID控制的壓力曲線在0.15 s前還有明顯振蕩,穩定性相對于內模PID來說較差,0.15 s后才慢慢趨于目標值,且精度明顯不足,有明顯的誤差。根據部分放大圖7(b)可以看出,基于內模PID控制的壓力閉環相比較于PID來說,抑制擾動響應效果更加明顯,響應時間相差0.06 s左右,且內模PID沒有振蕩,更加穩定,能夠精確快速達到目標值。
4 結論
針對重載臥式伺服缸在工程實際中,由缸筒自身重量產生的不良影響所導致伺服缸使用壽命縮短以及配套設備生產效率降低等問題,設計了在臥式伺服缸端底連接一個支撐小缸的新型結構以及配套的壓力-位置雙閉環獨立PID控制系統。本文通過內模控制與PID相結合的方法,提出內模PID控制器設計,克服了PID控制器參數整定困難等問題,運用Simulink仿真平臺對內模PID進行了仿真研究,對比PID控制效果表明:內模PID控制器能夠有效地改善系統的動態特性,并提高系統的魯棒性,有著良好的控制效果,為實際工程提供了重要的理論依據。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
藝術啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
