主動懸架有限頻域H∞時滯控制參數影響分析及優化
2018-09-26 03:29:48張進秋王興野賈進峰孫宜權李欣
兵工學報 2018年9期
張進秋, 王興野, 賈進峰, 孫宜權, 李欣
(陸軍裝甲兵學院 車輛工程系, 北京 100072)
0 引言
良好的懸架系統對于提高軍用越野車輛的乘坐舒適性和越野機動性具有重要意義,與傳統被動懸架和半主動懸架相比,主動懸架能夠根據路面情況對車體振動進行主動控制,因此能夠更好地抑制不平路面傳遞到車體的振動,是未來車輛懸架發展方向[1-4]。由于傳感器信號的采集、控制力的求解計算和作動器的機械響應等原因,時滯現象在主動控制過程中是必然存在的,而其中又以作動器機械響應導致的時滯為主。相關研究表明[5-6],時滯不僅會惡化主動控制的控制效果,而且有可能造成系統失穩,因此,在控制算法設計過程中考慮控制輸入的時滯問題對于提高控制的實際效果是十分必要的。
國內外學者對于時滯的控制問題進行了廣泛而深入的研究,提出了大量控制方法,如Smith預估控制、自適應控制、預測控制、滑模變結構控制、魯棒控制、模糊控制、神經網絡控制以及它們之間通過相互組合形成的各種改進控制等[7-15]。其中,魯棒控制雖然具有較為優異的控制性能,但由于計算復雜,限制了其廣泛應用。近年來,隨著有關線性矩陣不等式(LMI)理論的提出,魯棒H∞控制算法的設計與計算被大大簡化,使之成為一種更為實用的控制方法。此外,H∞控制算法還是一種有效的頻域控制方法[16-18],可針對人體敏感的4~8 Hz頻段內振動進行控制算法的優化設計,因此成為當前研究的一個熱點。文獻[19]對基于狀態反饋的有限頻域H∞控制算法進行了設計與性能研究,文獻[20-21]和文獻[22]則進一步分別對基于輸出反饋和時變時滯的H∞控制算法進行了理論推導與試驗驗證。但是在實際應用過程中發現,利用文獻[19-22]中所使用的可調參數取值進行控制算法求解時,得到的解并不是最優解,有的甚至會出現沒有可行解的問題。針對這個問題,本文首先利用文獻[19]中的方法提出考慮控制輸入時滯的有限頻域H∞控制算法,然后在確定可調參數取值范圍的基礎上分析控制參數變化對最優解求解的影響,并利用遺傳算法優化得到使控制算法有最優解的可調參數最優取值,最后通過數值計算與仿真對控制算法的性能進行頻域和時域分析。
1 時滯系統模型
考慮如圖1所示的2自由度1/4車輛主動懸架模型,可得到懸架模型的動力學方程為
(1)
式中:ms為車體質量;mt為車輪質量;ks和kt分別為懸架剛度和車輪剛度;cs為作動器機械阻尼系數;F為主動控制力;xr為路面不平位移;xs和xt分別為車體垂直位移和車輪垂直位移。具體參數設置見表1.
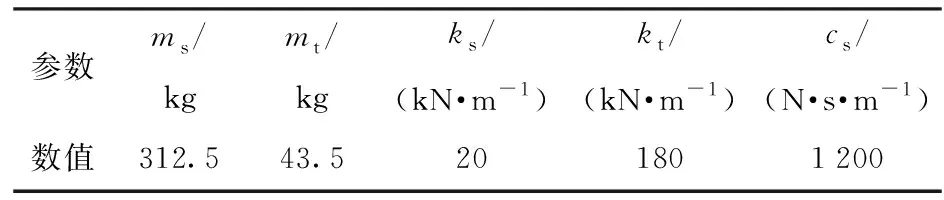
表1 懸架模型參數
懸架系統控制的目標是要在滿足懸架動行程不超過最大許用行程xstmax、車輪與地面保持良好接觸和振動控制力小于作動器最大控制力Fmax等條件的約束下,使懸架對外界擾動的抑制能力最好。根據以上控制目標和約束條件,可選取系統的狀態變量x(t)、系統的目標輸出變量z1(t)和約束輸出變量z2(t)分別為
式中:t為車輛行駛時間;g為重力加速度。
考慮系統的控制時滯為τ>0,則(1)式所示懸架控制系統可轉化為如下狀態空間:
(2)
式中:
2 考慮時滯的有限頻域H∞控制算法設計及控制參數影響分析
2.1 考慮時滯的有限頻域H∞控制算法設計
以(2)式所對應的時滯系統為研究對象,系統中一個考慮控制輸入時滯的有限頻域H∞控制算法可按照以下方法設計。
定理對于給定的正數γ、α、β1、β2、ρ,如果存在對稱矩陣P>0,P1>0,P2>0,S1>0,S2>0,R1>0,R2>0,Q>0,以及任意矩陣K和Y滿足不等式(3)式~(5)式:
(3)
(4)
(5)

定理的具體證明過程可參考文獻[19],從其證明過程中可知,控制算法求解時,參數ρ的取值決定了控制算法所能適應的wmax,而參數α、β1、β2的主要作用則是通過調整它們的取值使LMI有可行解。進行控制算法設計時,通常應首先確定所針對的wmax,即wmax近似為1個固定值,雖然參數α、β1、β2在不同取值條件下求得的γ2值是1個變化量,但是通過不同取值測試發現,其最小值都在同一數量級的較小范圍內變化,以時滯τ=5 ms時的求解為例,γ的最小值基本在3左右變化。為了使針對的wmax值近似為1個固定值,此時參數ρ取固定值0.16,因此需要優化的可調控制參數主要就是α、β1、β2.
2.2 控制參數影響分析
要分析控制參數α、β1、β2取值變化對求解值的影響,需要考慮兩個方面的問題:一是得到使控制算法有可行解的參數最大取值范圍;二是分析參數在取值范圍內變化時,求解的最小值變化是否有一定規律。經過不同取值后的求解計算,得到使控制算法有可行解的3個參數變化范圍分別為α∈[0.1,200],β1∈[0.01,0.2],β2∈[0.8,200].
固定α、β1、β2中的1個參數,使另外2個參數在各自的取值范圍內變化,分析參數變化對γ最小值的影響,參數的初始取值為α=50,β1=0.1,β2=10,求解的結果如圖2所示。從圖2(a)中可以看出,當β2=10固定不變時,在α=94.790,β1=0.116情況下,γ最小值為2.673;從圖2(b)中可以看出,當α=50固定不變時,在β1=0.147 4,β2=11.284情況下,γ最小值為2.698;從圖2(c)中可以看出,當β1=0.1固定不變時,在α=157.916,β2=11.284情況下,γ最小值為2.731. 從上述數據可以看出,當固定3個參數中的1個、變換另外2個參數時,γ最小解對應的某1個參數值并不都相同,且與該參數的取值范圍差距可能較大,即并不是在某一較小范圍內使γ有最小解,最終求解的γ最小值與3個參數的取值組合有很大關系。
3 基于遺傳算法的控制算法優化設計
由于控制參數不同的取值組合會導致求解結果有較大變化,如果單純依靠經驗來調試和確定各個參數的取值,不僅要耗費大量時間,而且也很難找到真正的最優解。因此,考慮引入擁有較強全局優化能力和并行搜索能力的遺傳算法來改進控制算法的設計,以找到一組性能最佳的控制參數,具體過程如下。
1)染色體編碼與種群生成。染色體編碼采用實數編碼方式,以控制參數作為染色體的3個可調變量,則可將其表示為Ch=(α,β1,β2). 初始種群的創建采用可行種群,種群規模設置為N=100.
2)適應度函數與適應值縮放。適應度函數可直接取為Fitness=γ(Ch),適應值縮放采用排序方法。
3)選擇、交叉與變異。選擇算子采用競爭方法,每次選擇時隨機地從種群中選出nc個染色體(nc 交叉算子采用單點交叉方法。 變異算子采用均勻策略,使搜索點在整個搜索空間中隨機自由移動,從而增加種群的多樣性。 4)遷移。遷移算子支持在多個子種群中交換個體,某一子種群中的最優個體間隔一定的代數代替另一子種群中的最差個體。與單種群遺傳算法相比,支持多子種群中個體遷移的遺傳算法能夠在大多數情況下改善算法的優化性能。遷移算子的3個控制參數分別設置如下:遷移方向選擇向前遷移,即只能從n代子種群向n+1代子種群遷移;遷移率設置為0.1,如果第n代發生遷移,則遷移的個體數nm=0.1×Nn,Nn為第n代子種群的個體數量;遷移間隔設置為5,即每5代發生一次遷移。 遺傳算法的終止準則采用迭代次數,本文設置終止遺傳算法的迭代次數為20代。綜上所述,可得到遺傳算法的流程如圖3所示。 根據以上確定的遺傳算法流程和參數取值,運用MATLAB軟件中的GA工具箱進行求解計算,求解過程中歷代種群的最優適應度和平均適應度如圖4所示。從圖4中可以看出,初始種群的最小適應值為3,平均適應值為4.5,由此可知,遺傳算法可在較大范圍內進行最優值的搜索,具有較好的全局優化能力。在迭代到第16代時,種群的最大、最小和平均適應度基本穩定在2.669,表明了算法具有較快的收斂速度。最終運行得到的遺傳算法優化值方法的參數取值、最優解與經驗值方法的參數取值、最優解對比如表2所示。 表2 控制參數與最優解對比 為了對比分析控制器對于時滯的控制效果,參考文獻[16]中的設計,求解未考慮輸入時滯的有限頻域H∞控制算法(以下稱控制1)的狀態反饋增益Kf1. 根據表1中懸架參數的取值和表2中控制參數的取值,分別對依據經驗設計的考慮控制時滯的有限頻域H∞控制算法(以下稱控制2)和基于遺傳算法優化設計的考慮控制時滯的有限頻域H∞控制算法(以下稱控制3)的狀態反饋增益Kf2、Kf3進行設計求解。分別對3種控制條件下的振動特性進行頻域和時域的仿真分析, Kf1=[14 352.1 -1 591.76 -2 091.80 -915.95], 從頻域角度對不同控制條件下懸掛系統的車體加速度、懸架動行程和車輪動載荷傳遞率進行對比,如圖5所示。 由圖5(a)可以看出:與被動無控制狀態相比,使用有限頻域H∞控制算法的懸架振動控制效果在除車輪共振點的整個頻域范圍內都優于無控制狀態;與控制1相比,控制2和控制3在除低頻區之外的車體共振區和中高頻區域,特別是對乘坐舒適性影響較大的4~8 Hz頻段都有更好的控制效果;與控制2相比,控制3在除低頻區和車體共振區之外的中高頻區域,特別是對乘坐舒適性影響較大的4~8 Hz頻段都有更好的控制效果。綜合考慮車體加速度在整個頻域范圍內的控制效果可以得出:基于遺傳算法優化設計的有限頻域H∞控制算法對乘坐舒適性的改善效果最優。 由圖5(b)可以看出:與被動無控制狀態相比,采用有限頻域H∞控制算法會導致低頻區和車輪共振區懸架動行程的顯著惡化,而在車體共振區則略優于無控制狀態,高頻區與無控制狀態基本相當;3種控制算法在整個頻域上相比,控制3優于控制2,控制2優于控制1,但差距都很小。綜合考慮懸架動行程在整個頻域范圍內的振動控制效果可以得出:主動控制會造成懸架動行程的增大,且其中基于遺傳算法優化設計的有限頻域H∞控制算法對車輪動載荷的惡化程度稍大。 由圖5(c)可以看出:與被動無控制狀態相比,采用有限頻域H∞控制算法可顯著降低中低頻區域的車輪動載荷,同時又顯著增加了車輪共振區的車輪動載荷,而在高頻區與被動無控制基本相同;與控制1相比,控制2在全頻域內優于控制1,控制3除在車體共振區優于控制1外,其他頻段均劣于控制1;與控制2相比,控制3除在車體共振區略優于控制2外,其他頻段均劣于控制2. 綜合考慮車輪動載荷在整個頻域范圍內的控制效果可以得出:基于遺傳算法優化設計的有限頻域H∞控制算法對車輪動載荷的惡化稍大,從而會在一定程度上惡化車輛的操縱穩定性。 控制算法設計的主要目標是改善車輛的乘坐舒適性,但懸架動行程與車輪動載荷均需小于其許用值,即滿足約束條件。而不同控制算法在不同頻段上的控制性能各有優劣,因此總體性能是否滿足約束條件以及性能的優劣對比,還需對控制算法進行時域分析。 某型軍用輪式車輛在鄉村土路(C級路面)上的平均行駛速度約為36 km/h,最大行駛速度約為85 km/h. 為進一步驗證控制算法對于不同等級路面的振動控制效果,下面對車輛分別以36 km/h、85 km/h速度行駛于C級路面40 s時間后懸架的減振性能進行仿真分析。根據國家標準GB/T 7031—2005,利用諧波疊加法生成相應的路面隨機激勵信號作為擾動輸入,對4種不同控制條件下得到的數據進行處理,得到車體加權加速度均方根值的統計計算結果如表3所示,對懸架相對動行程、車輪相對動載荷、相對控制力峰值的統計計算結果如表4所示。 表3 車體加權加速度均方根值 表4 控制算法約束性能峰值統計 分析表3中的數據可以發現:與被動無控制狀態相比,3種控制算法都能夠有效地降低不同等級路面激勵條件下的車體加權加速度均方根值,改善車輛的乘坐舒適性,且改善率均大于30%,控制算法具有較好的魯棒性;由3種控制算法相比可以看出,考慮了控制輸入時滯的控制2、控制3對車體加速度的控制效果優于沒有考慮控制輸入時滯的控制1,且使用遺傳算法對控制參數進行優化的控制3比依靠經驗設計的控制2的控制效果提升了1.83%~7.18%,比未考慮控制輸入時滯的控制1的控制效果提升了11.82%~12.25%. 通過表4中約束性能的峰值統計數據可以看出:在C級路面行駛速度36 km/h條件下,控制的約束條件均能得到滿足;而在C級路面行駛速度85 km/h條件下,除懸架相對動行程能夠滿足約束條件外,車輪相對動載荷與相對控制力均不能滿足控制約束條件,通過分析計算發現,這是因為此時的激勵信號超過了控制算法設計所允許的最大擾動能量。 根據L2范數的定義可知,外界擾動信號能量w的計算方法為 (6) 式中:fs0為參考空間頻率,取值為0.1 m-1;Gxr(n0)為路面不平度系數,對于C級路面,取值為256×10-6m2/m-1;v為車速;fu、fl分別代表上限、下限時間頻率,可按照(7)式進行計算: f=fsv, (7) fs為路面空間頻率,上限空間頻率fsu、下限空間頻率fsl通常取值分別為2.83 m-1、0.011 m-1. 綜合以上頻域與時域的分析可以看出,使用遺傳算法優化設計的考慮控制輸入時滯的有限頻域H∞控制算法,能夠在外界擾動為能量有界信號的情況下,有效降低在4~8 Hz頻域范圍內的車體加速度,提高車輛的乘坐舒適性,同時滿足懸架相對動行程、車輪相對動載荷和相對控制力的約束條件。當外界擾動能量超過設計所允許的最大值時,雖然約束條件不能得到充分保證,但對于車輛的乘坐舒適性仍有較好地改善作用。 1)考慮控制輸入時滯的有限頻域H∞控制算法的最優解主要由可調參數α,β1,β2的取值決定,但各參數與最優解之間沒有確定關系,難以單純依靠經驗獲得控制算法的最優解,因此可以采用遺傳算法對控制參數取值進行優化設計。 2)對于能量有界的路面擾動輸入,基于遺傳算法優化設計的控制算法,能夠在滿足控制約束條件下更好地降低時滯對控制效果的影響,降低車體在4~8 Hz頻域范圍內的振動,提高車輛的乘坐舒適性。當外界擾動能量超過設計所允許的最大值時,約束條件不能得到充分保證,但控制算法對于車輛的乘坐舒適性仍有較好地改善作用。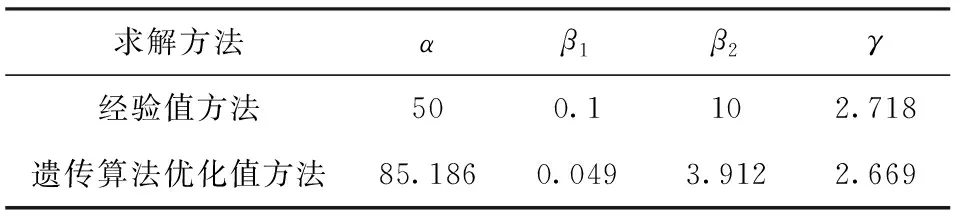
4 性能分析
Kf2=[18 178.4 67.21 4 039.22 -963.62],
Kf3=[17 481.5 76.97 9 500.99 -1 005.51].4.1 頻域分析
4.2 時域分析




5 結論
