四旋翼無人機(jī)系統(tǒng)PD-ADRC串級(jí)控制
2018-09-27 11:58:42陳增強(qiáng)張興會(huì)孫明瑋孫青林
系統(tǒng)工程與電子技術(shù) 2018年9期
關(guān)鍵詞:系統(tǒng)設(shè)計(jì)
張 勇, 陳增強(qiáng), 張興會(huì), 孫明瑋, 孫青林
(1. 南開大學(xué)計(jì)算機(jī)與控制工程學(xué)院, 天津 300350; 2. 天津中德應(yīng)用技術(shù)大學(xué)計(jì)算機(jī)學(xué)院, 天津 300350)
0 引 言
四旋翼無人機(jī)是目前比較常見的一種多旋翼無人機(jī),它主要由十字交叉的對(duì)稱機(jī)體以及4個(gè)螺旋槳組成,無人機(jī)的升力是通過4個(gè)電機(jī)對(duì)4個(gè)螺旋槳的轉(zhuǎn)速改變而得到的,從而實(shí)現(xiàn)四旋翼的3個(gè)位置和3個(gè)姿態(tài)的6自由度控制。四旋翼無人機(jī)因其優(yōu)越的低空飛行能力而受到廣泛應(yīng)用,關(guān)于四旋翼無人機(jī)的控制系統(tǒng)設(shè)計(jì)問題也成為了近年來控制領(lǐng)域的一個(gè)研究熱點(diǎn),由于四旋翼模型具有非線性、強(qiáng)耦合和不確定性,以及四旋翼無人機(jī)實(shí)際飛行環(huán)境的復(fù)雜性,要求控制系統(tǒng)應(yīng)有較強(qiáng)的抗干擾能力和魯棒性。針對(duì)以上四旋翼無人機(jī)的控制問題,目前國內(nèi)外相關(guān)的控制方法有比例-積分-微分(proportion-integral-differential,PID)控制[1]、滑模控制[2-6]、四元反饋控制[7]、Backstepping[8]、線性二次型調(diào)節(jié)器[9]、魯棒控制[10]、自適應(yīng)控制[11-13]等。
文獻(xiàn)[14]在20世紀(jì)80年代提出一種新的控制策略自抗擾控制技術(shù)(active disturbance rejection control technique)。自抗擾控制最核心的技術(shù)就是把被控系統(tǒng)內(nèi)部的不確定因素以及外部擾動(dòng)都看成是未知總擾動(dòng),然后用擴(kuò)張狀態(tài)觀測器(extended state observer,ESO)對(duì)總擾動(dòng)進(jìn)行估計(jì)并在控制器中給予補(bǔ)償。自抗擾控制器具有控制精度高、響應(yīng)速度快、魯棒性強(qiáng)等優(yōu)點(diǎn),因此在許多的理論研究和工程實(shí)際中都得到了廣泛的研究與應(yīng)用。但是自抗擾控制器是非線性的,這就使得控制器的參數(shù)過多,參數(shù)難以整定,算法不易實(shí)現(xiàn)。因此文獻(xiàn)[15]提出一種線性自抗擾控制器,其參數(shù)少,便于參數(shù)調(diào)節(jié)和算法實(shí)現(xiàn)。
本文針對(duì)四旋翼無人機(jī)非線性、多變量、強(qiáng)耦合和對(duì)擾動(dòng)敏感等控制問題,設(shè)計(jì)了比例-微分(proportion-differential,PD)和自抗擾的串級(jí)控制系統(tǒng),其中位置回路采用了經(jīng)典的PD控制,姿態(tài)回路分別用非線性自抗擾控制器(active disturbance rejection controller,ADRC)和線性自抗擾控制器(linear active disturbance rejection controller,LADRC)進(jìn)行設(shè)計(jì),在不加干擾和加干擾兩種環(huán)境下,分別對(duì)兩種控制器進(jìn)行仿真,并對(duì)兩種控制器的位置控制結(jié)果、姿態(tài)控制結(jié)果以及控制量信號(hào)進(jìn)行對(duì)比分析。結(jié)果表明,在針對(duì)四旋翼的控制問題上,LADRC的控制結(jié)果更符合工程實(shí)際的需求,具有更強(qiáng)的魯棒性和抗干擾能力。
1 ADRC的基本原理
非線性ADRC由跟蹤微分器(tracking differentiator,TD)、ESO、非線性狀態(tài)誤差反饋控制律(nonlinear state error feedback,NLSEF) 3部分組成。LADRC由TD、線性ESO(linear ESO,LESO)、線性狀態(tài)誤差反饋控制律(linear state error feedback,LSEF)3部分組成。
1.1 TD
安排TD的目的是給系統(tǒng)輸入設(shè)計(jì)一個(gè)平滑的過渡過程,進(jìn)而得到光滑的輸入信號(hào),以降低系統(tǒng)初始誤差。
以二階連續(xù)系統(tǒng)為例,TD算法為
(1)
式中,v為設(shè)定值;r為決定信號(hào)跟蹤快慢的可調(diào)參數(shù);h為濾波因子。fhan(·)函數(shù)為最速控制綜合函數(shù),具體算法為
(2)
1.2 ESO
ESO是指除了被控對(duì)象本身的狀態(tài),還要把對(duì)象內(nèi)部的不確定性以及外部擾動(dòng)作為未知總擾動(dòng),擴(kuò)張成另一個(gè)新的狀態(tài)。通過觀測器將總擾動(dòng)觀測出來,并加到控制器中進(jìn)行補(bǔ)償,這樣就能使原來的非線性控制系統(tǒng)變成線性的積分器串聯(lián)控制系統(tǒng)。上述動(dòng)態(tài)估計(jì)補(bǔ)償總擾動(dòng)的方法,就是自抗擾控制的核心技術(shù)。
連續(xù)形式的LESO算法為
(3)
為了將LESO的參數(shù)都能用ωo來進(jìn)行表示,現(xiàn)將LESO的極點(diǎn)全部設(shè)置在-ωo處,表示為
sn+β1sn+1+…+βn+1s+βn=(s+ωo)n
(4)
這樣表示之后,LESO就只剩下ωo這一個(gè)參數(shù),便于觀測器的設(shè)計(jì)以及參數(shù)整定。
連續(xù)系統(tǒng)非線性ESO的算法為
(5)
式中,β1~βn+1為ESO待調(diào)節(jié)的參數(shù);a1~an均為[0,1]的可調(diào)參數(shù);2δ為線性段的區(qū)間長度;fal(·)函數(shù)的公式為
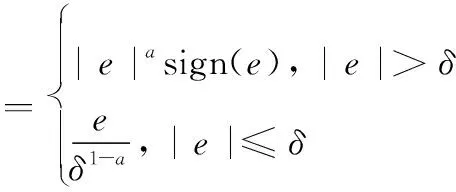
(6)
1.3 狀態(tài)誤差反饋控制律
對(duì)于LADRC,用LESO進(jìn)行動(dòng)態(tài)補(bǔ)償之后,系統(tǒng)變成積分器串聯(lián)控制系統(tǒng),因此只需采用較為簡單的線性PD控制律就可以到達(dá)控制目的。線性誤差控制律算法為
(7)
為了便于控制器的設(shè)計(jì)以及對(duì)參數(shù)進(jìn)行整定,因此希望控制器的參數(shù)都只用ωc來進(jìn)行表示,方法是將系統(tǒng)閉環(huán)特征多項(xiàng)式的根全部設(shè)置在-ωc處,表示為
sn+kdn-1sn+1+…+kd1s+kp=(s+ωc)n
(8)
以二階連續(xù)系統(tǒng)為例,一種基于fhan(·)函數(shù)構(gòu)造而成的NLSEF,算法為
u0=-fhan(e1,ce2,r2,h2)
(9)
式中,c、r2、h2均為可調(diào)參數(shù)。
系統(tǒng)最終的控制量u由觀測器對(duì)擾動(dòng)的估計(jì)值z(mì)3來進(jìn)行補(bǔ)償,即
(10)
2 四旋翼無人機(jī)系統(tǒng)模型
四旋翼無人機(jī)系統(tǒng)的結(jié)構(gòu)示意圖,如圖1所示。
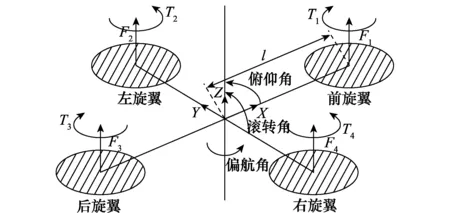
圖1 四旋翼無人機(jī)系統(tǒng)結(jié)構(gòu)示意圖Fig.1 Diagram of quadrotor
四旋翼無人機(jī)系統(tǒng)的數(shù)學(xué)模型[16-17]公式為
(11)

(12)
其他系統(tǒng)參數(shù)如表1所示。
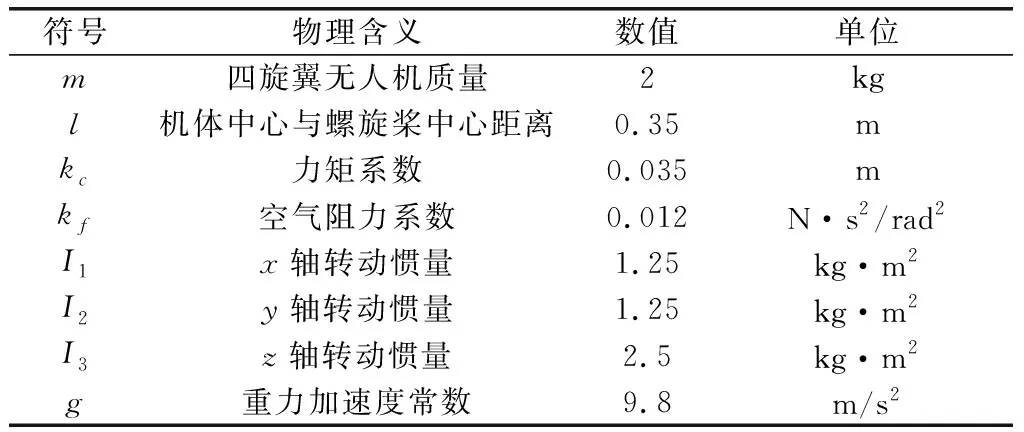
表1 四旋翼無人機(jī)系統(tǒng)參數(shù)
為了便于四旋翼無人機(jī)控制系統(tǒng)的設(shè)計(jì)以及表示,引入虛擬控制量U1,U2,U3,U4,虛擬控制量與F1,F2,F3,F4之間的變量轉(zhuǎn)換為
(13)
3 四旋翼無人機(jī)控制系統(tǒng)設(shè)計(jì)
四旋翼無人機(jī)是由3個(gè)位置變量和3個(gè)姿態(tài)變量組成的6自由度飛行系統(tǒng),因此可分為位置回路和姿態(tài)回路。由于姿態(tài)回路控制速度較快,而且可以由虛擬控制量分別獨(dú)立控制,因此對(duì)姿態(tài)回路的控制將采用自抗擾控制,位置回路的控制將采用經(jīng)典的PD控制。
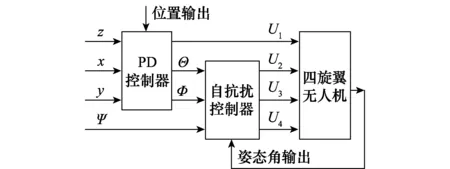
圖2 四旋翼無人機(jī)控制框圖Fig.2 Block diagram of quadrotor control
3.1 姿態(tài)回路ADRC設(shè)計(jì)
四旋翼無人機(jī)的姿態(tài)回路是由俯仰角、滾轉(zhuǎn)角和偏航角組成,由于引入了虛擬控制量,姿態(tài)回路可以分為3個(gè)獨(dú)立的通道且分別由唯一對(duì)應(yīng)的虛擬控制量進(jìn)行單獨(dú)控制。為了便于控制器的設(shè)計(jì)以及參數(shù)整定,3個(gè)姿態(tài)角通道的控制器算法相同且采用相同參數(shù)。以偏航角通道為例進(jìn)行ADRC設(shè)計(jì),控制算法為
(14)

(15)
以偏航角通道為例進(jìn)行LADRC設(shè)計(jì),控制算法為
(16)
3.2 位置回路PD控制器設(shè)計(jì)
位置回路是由高度z,水平位置x以及水平位置y組成的,可以將其分為兩個(gè)獨(dú)立的部分,其中高度通道可以由虛擬控制量U1單獨(dú)控制,水平位置分量x和y分別與姿態(tài)角θ和φ相耦合,再分別由姿態(tài)回路中的虛擬控制量U2和U3進(jìn)行控制。
設(shè)xd,yd,zd為3個(gè)位置的設(shè)定值,則高度通道PD控制器算法為
(17)
式中,kpz和kdz分別為高度通道PD控制器的比例參數(shù)和微分參數(shù)。
水平位置x通道和y通道的PD控制器算法為

(18)
(19)
式中,kpx,kpy和kdx,kdy分別為通道x和通道y的比例參數(shù)和微分參數(shù),uθ和uφ分別為俯仰角θ和滾轉(zhuǎn)角φ的期望軌跡,將θ和φ的期望軌跡輸入到姿態(tài)回路中就可以得到虛擬控制量U2和U3。
3.3 系統(tǒng)穩(wěn)定性分析
以偏航角通道為例,其系統(tǒng)模型為
(20)
式中,xi(i=1,2,3)分別為偏航角,偏航角速度以及系統(tǒng)擾動(dòng);b0=1。
對(duì)偏航角通道設(shè)計(jì)ESO如式(21)所示,控制器設(shè)計(jì)如式(22)所示。
(21)
(22)
由式(11)和式(22)可知,偏航角通道的傳遞函數(shù)為
(23)
式中,a=kf/I3。
自抗擾控制器的傳遞函數(shù)可以分成兩個(gè)部分Gh(s)和Gc(s)[19],系統(tǒng)傳遞函數(shù)方框圖如圖3所示。

圖3 系統(tǒng)傳遞函數(shù)方框圖
Fig.3 Block diagram of transfer function
(24)
(25)

則偏航角通道環(huán)路增益?zhèn)鬟f函數(shù)和閉環(huán)傳遞函數(shù)為
(26)
(27)
式中,d1=a+c3;d2=ac3+c4;d3=ac4;d4=c1+ac4。因此只要正確選擇觀測器和控制器的帶寬就可以保證系統(tǒng)的穩(wěn)定性。本文仿真實(shí)驗(yàn)取ωo=40,ωc=30,則偏航角通道的伯德圖如圖4所示,此時(shí)的相角穩(wěn)定裕度為32°。
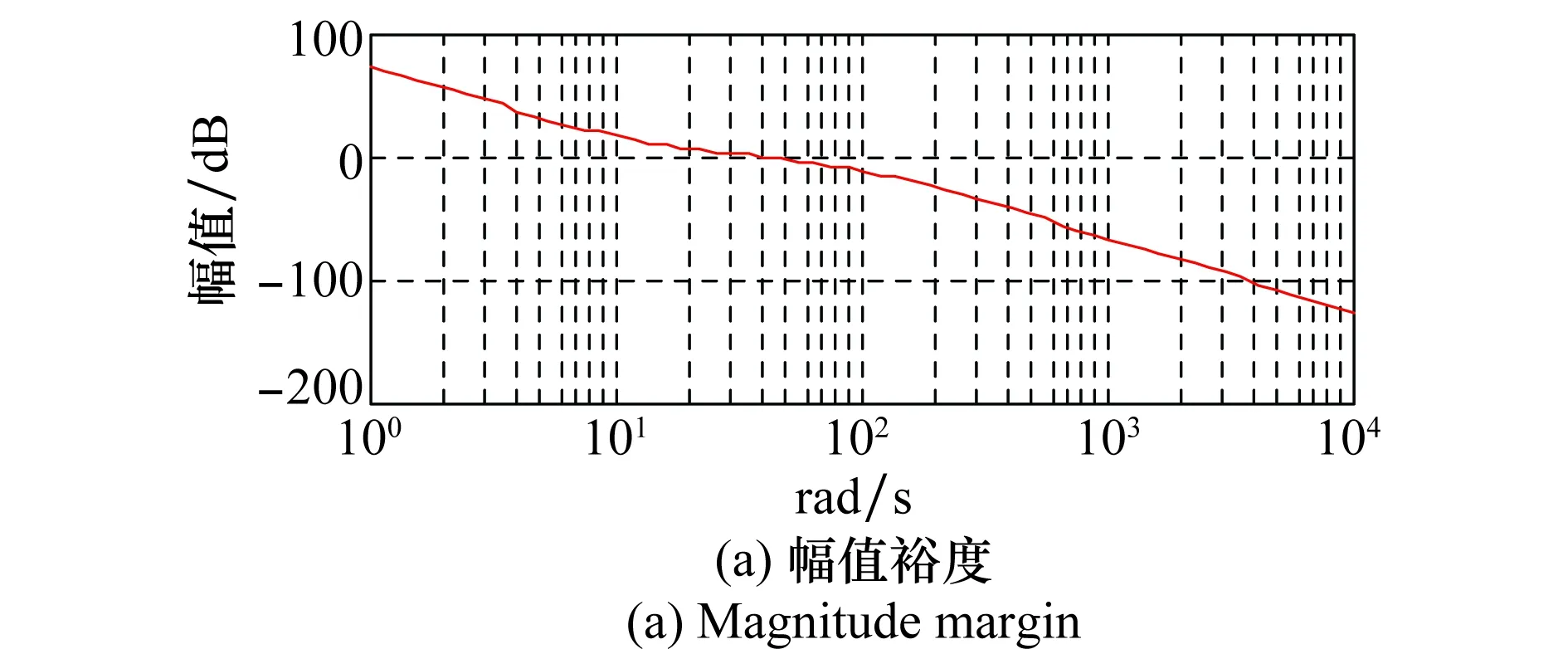
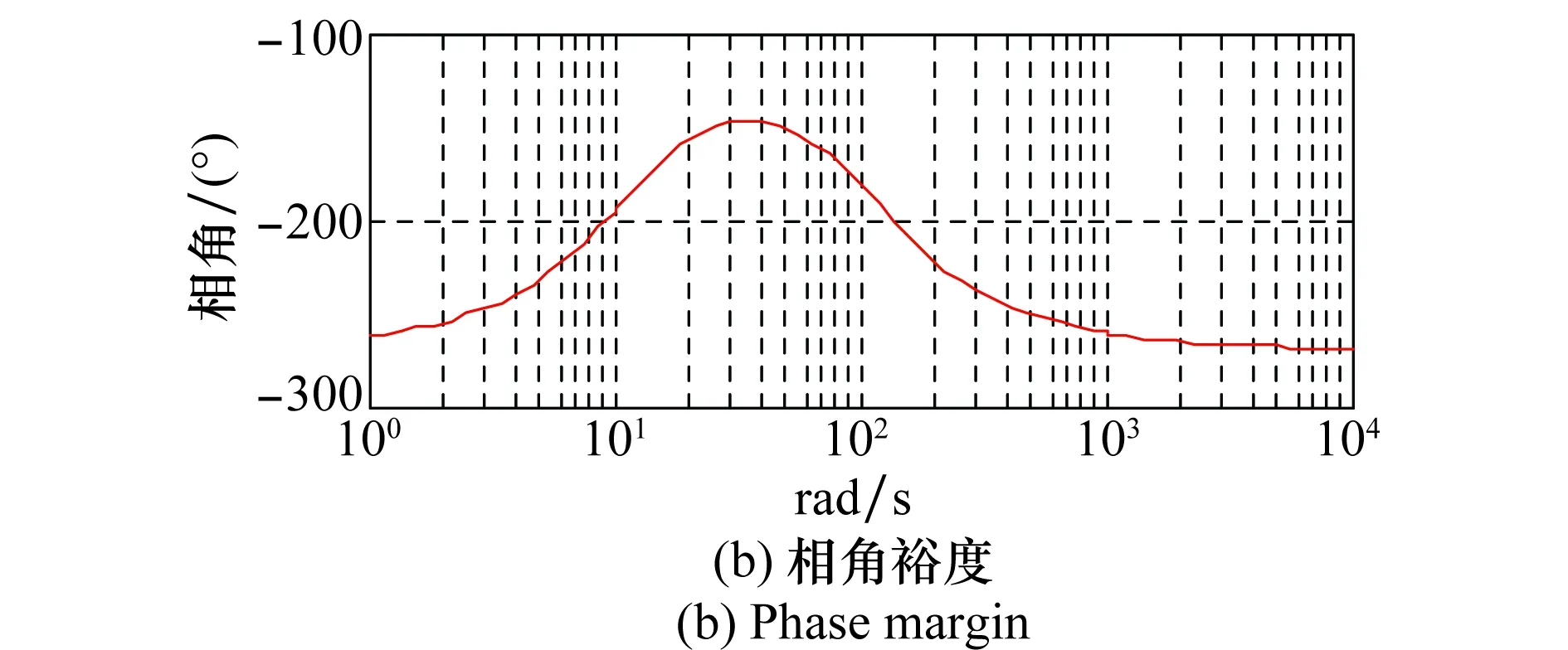
圖4 偏航角通道伯德圖Fig.4 Bode plot for yaw angle
4 四旋翼無人機(jī)系統(tǒng)控制仿真
將根據(jù)上文所述的設(shè)計(jì)方法分別對(duì)四旋翼無人機(jī)設(shè)計(jì)PD-ADRC和PD-LADRC,在Matlab環(huán)境下進(jìn)行四旋翼無人機(jī)飛行控制仿真,并將兩種方法進(jìn)行對(duì)比分析。
4.1 帶擾動(dòng)的四旋翼無人機(jī)控制仿真
分別在俯仰角、滾轉(zhuǎn)角和偏航角通道加入擾動(dòng)ω1(t)、ω2(t)、ω3(t),3個(gè)擾動(dòng)的具體數(shù)值為
ω1(t)=sign(sin 0.9t)
(28)
ω2(t)=sign(sin 0.9t)+cos 0.3t
(29)
ω3(t)=0.5sign(sin 0.5t)+cos 0.3t+2cos 0.9t
(30)
PD-ADRC控制系統(tǒng)參數(shù)如表2所示,PD-LADRC控制系統(tǒng)參數(shù)如表3所示,圖5為無人機(jī)軌跡跟蹤效果圖,位置回路控制仿真結(jié)果如圖6所示,姿態(tài)回路控制仿真結(jié)果如圖7所示。
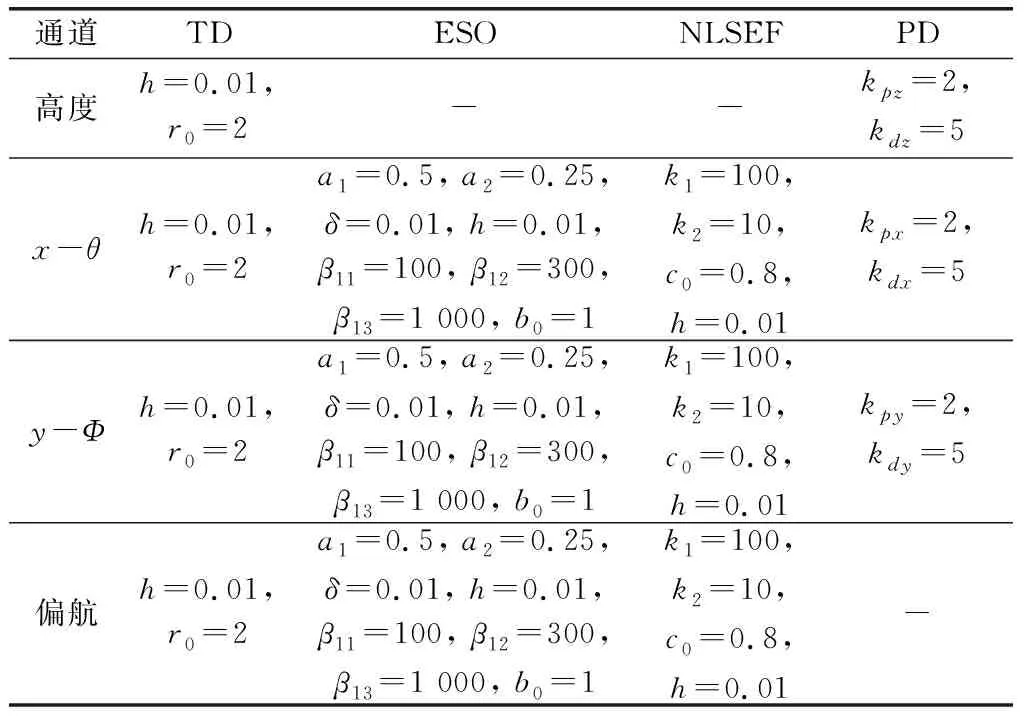
表2 PD-ADRC仿真參數(shù)
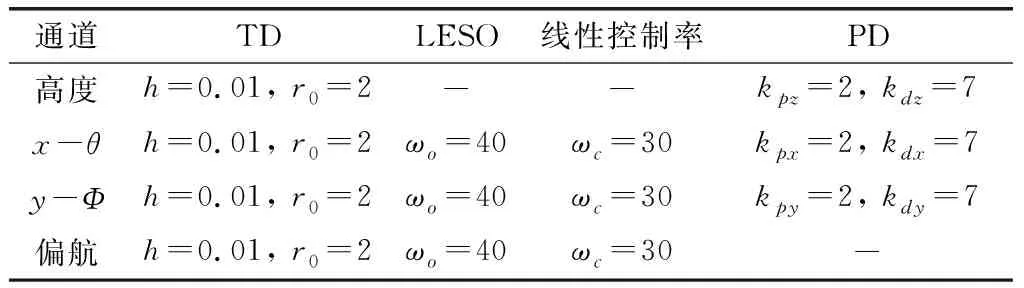
表3 PD-LADRC仿真參數(shù)
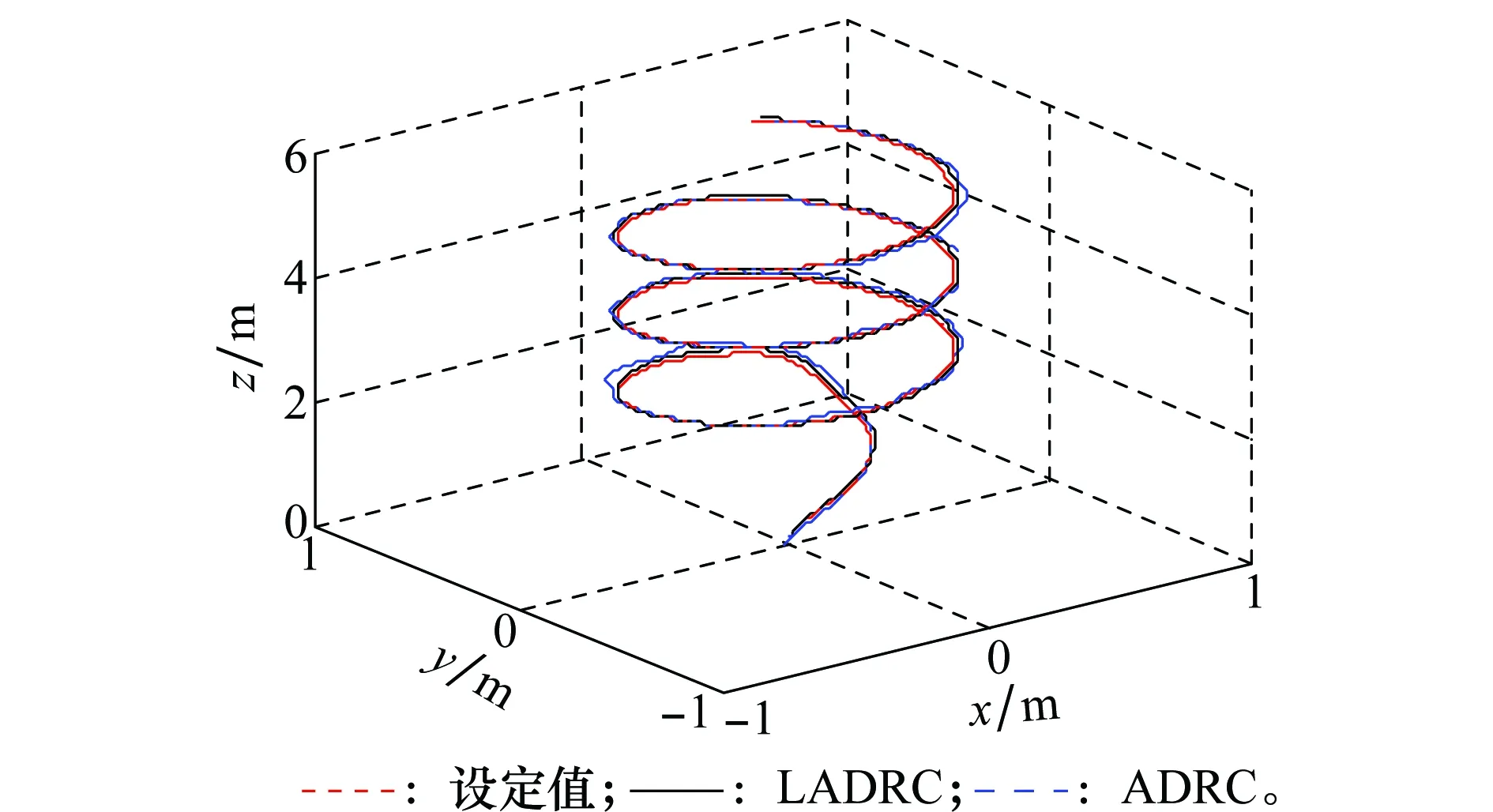
圖5 四旋翼無人機(jī)軌跡跟蹤效果Fig.5 Trajectory tracking of quadrotor
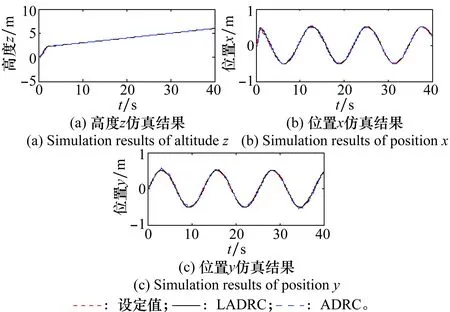
圖6 位置控制仿真結(jié)果Fig.6 Simulation results of position control
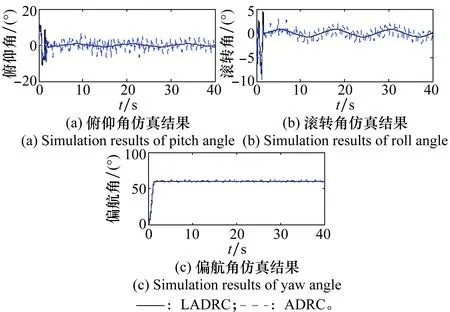
圖7 姿態(tài)控制仿真結(jié)果Fig.7 Simulation results of attitude control
由圖5~圖7可知,四旋翼無人機(jī)加入擾動(dòng)后,PD-LADRC的軌跡跟蹤效果以及位置控制效果依然良好,但是PD-ADRC則出現(xiàn)較為明顯的波動(dòng),且PD-ADRC對(duì)姿態(tài)角的控制很不理想,3個(gè)姿態(tài)角都出現(xiàn)了較大程度的振蕩,始終無法穩(wěn)定在期望值上,而PD-LADRC對(duì)姿態(tài)角的控制始終非常穩(wěn)定,控制效果良好。圖8和圖9分別為兩種控制系統(tǒng)的控制量曲線。
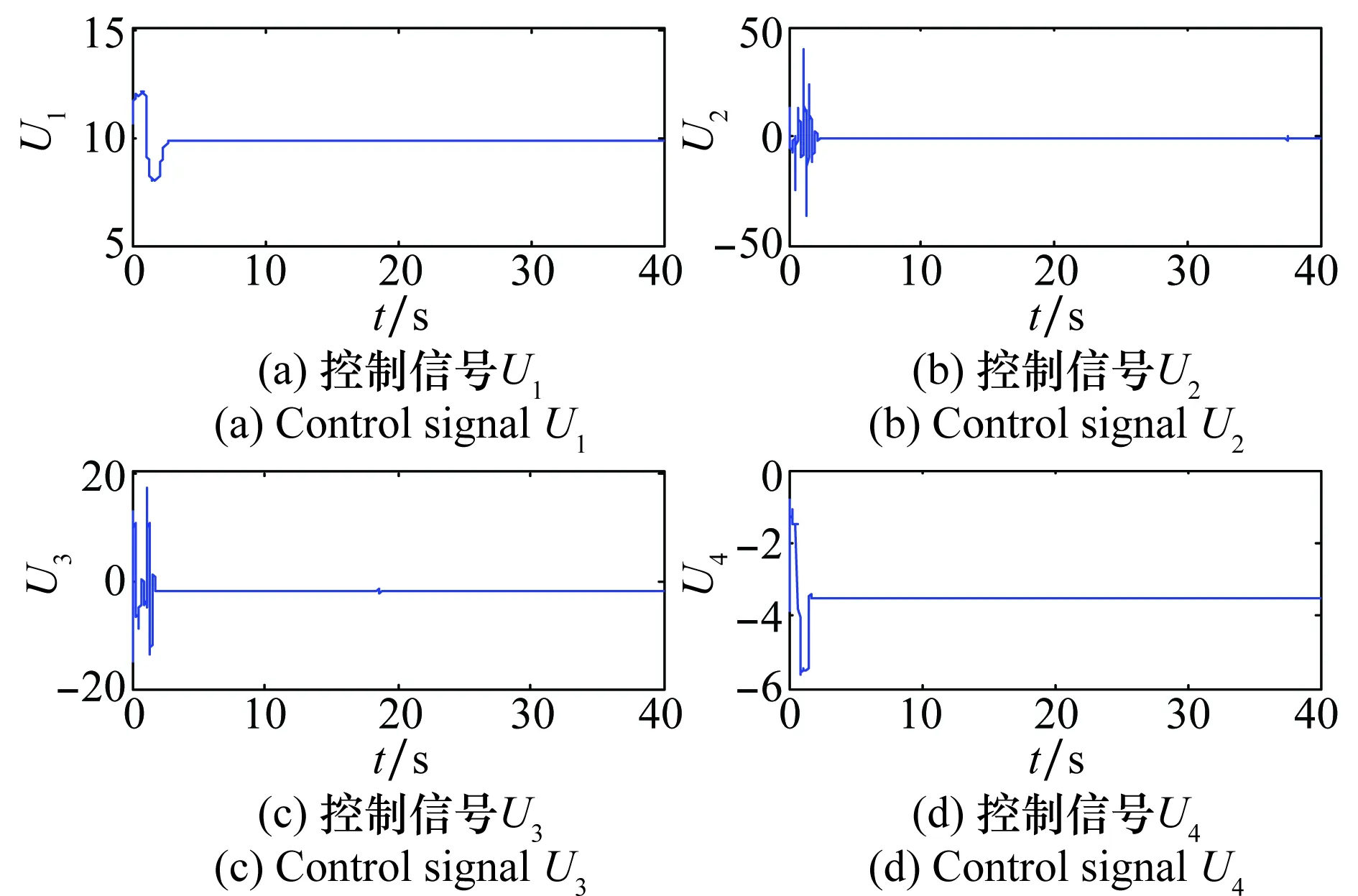
圖8 PD-LADRC控制信號(hào)Fig.8 Control signal of PD-LADRC
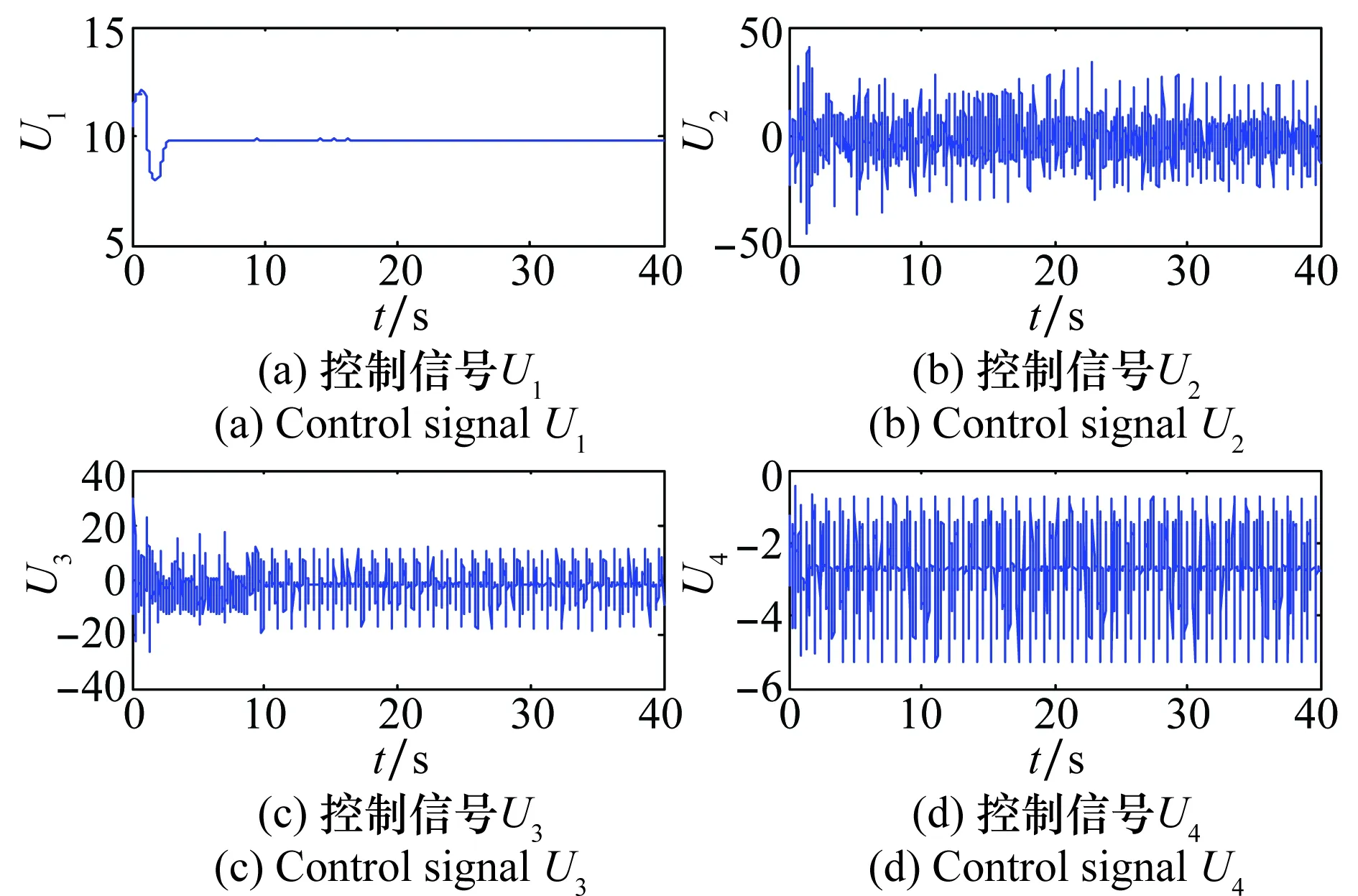
圖9 PD-ADRC控制信號(hào)Fig.9 Control signal of PD-ADRC
從圖8和圖9可以看出,PD-LADRC的4個(gè)控制量信號(hào)都是比較穩(wěn)定的,沒有出現(xiàn)較大波動(dòng),但是PD-ADRC的4個(gè)控制量中只有U1是比較穩(wěn)定的,其他3個(gè)控制量都出現(xiàn)了明顯的振蕩,穩(wěn)定性明顯低于PD-LADRC控制系統(tǒng)的控制效果。
4.2 帶信號(hào)延遲的四旋翼無人機(jī)控制仿真
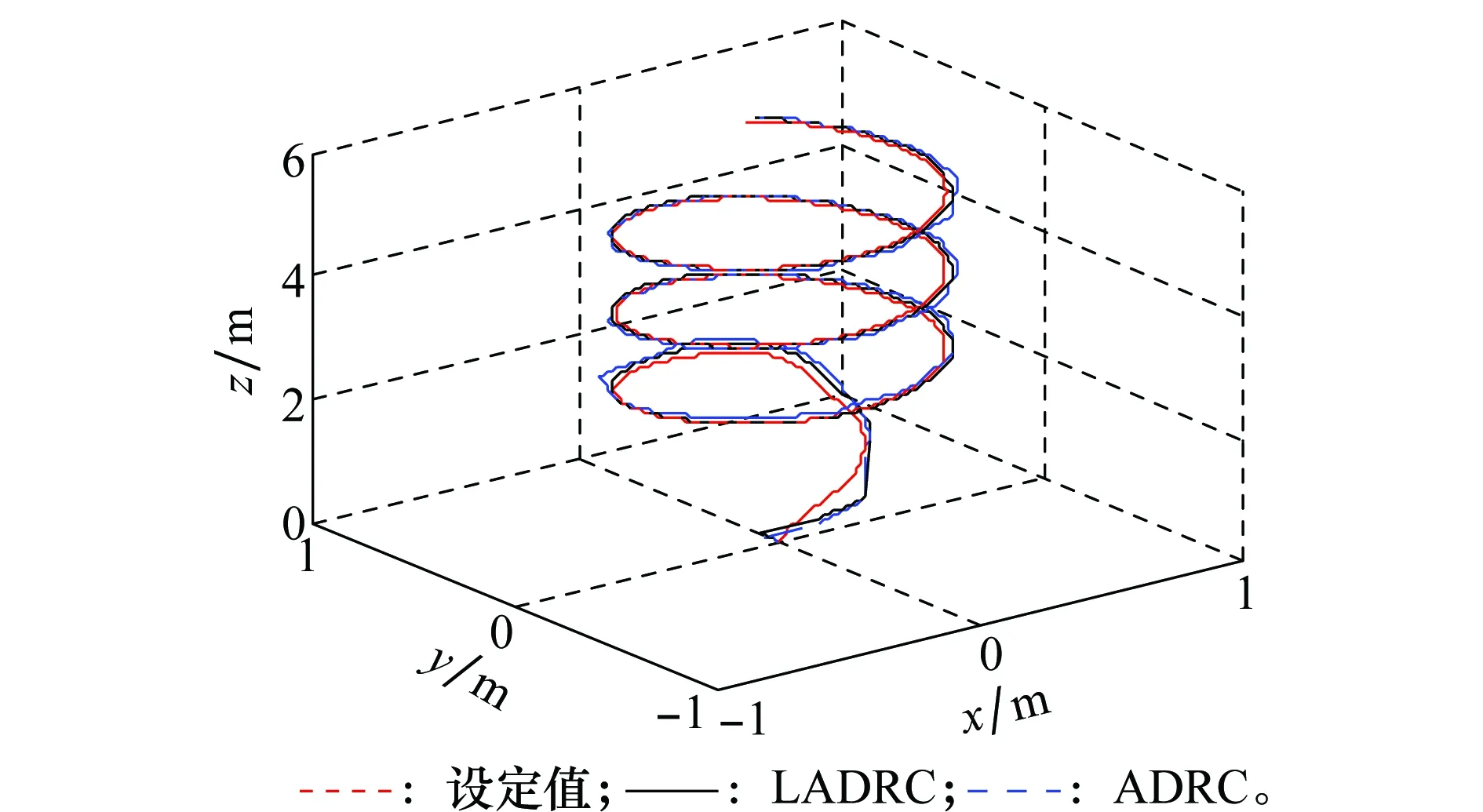
圖10 四旋翼無人機(jī)軌跡跟蹤效果Fig.10 Trajectory tracking of quadrotor
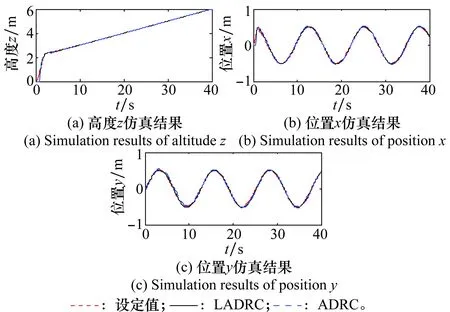
圖11 位置控制仿真結(jié)果Fig.11 Simulation results of position control
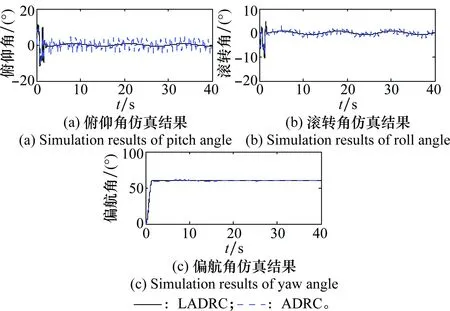
圖12 姿態(tài)控制仿真結(jié)果Fig.12 Simulation results of attitude control
由圖10~圖12可知,四旋翼無人機(jī)的被控量加入延遲后,在保持所有控制器參數(shù)不變的情況下,本文設(shè)計(jì)的控制器仍能保證四旋翼穩(wěn)定準(zhǔn)確地跟蹤設(shè)定軌跡,說明系統(tǒng)具有一定的穩(wěn)定裕度,可以保證四旋翼在一定的信號(hào)延遲后也能平穩(wěn)飛行。而且PD-LADRC的控制效果要明顯優(yōu)于PD-ADRC的控制效果,尤其是對(duì)姿態(tài)角的控制,PD-ADRC控制的3個(gè)姿態(tài)角同樣出現(xiàn)了較大程度的振蕩,而PD-LADRC對(duì)姿態(tài)角的控制始終非常穩(wěn)定,控制效果良好。
5 結(jié) 論
本文針對(duì)四旋翼無人機(jī)飛行系統(tǒng),分別設(shè)計(jì)了PD-ADRC串級(jí)控制系統(tǒng)和PD-LADRC串級(jí)控制系統(tǒng)。由于PD控制具有控制結(jié)構(gòu)簡單實(shí)用、參數(shù)易調(diào)節(jié)等優(yōu)點(diǎn),因此非常適合應(yīng)用在通過與位置變量反解得到的角度變量上,而ADRC具有的強(qiáng)解耦能力和對(duì)內(nèi)擾和外擾的估計(jì)補(bǔ)償能力也很好地解決了姿態(tài)回路中非線性、多變量以及強(qiáng)耦合等控制問題。對(duì)無人機(jī)的飛行位置和飛行姿態(tài)進(jìn)行了控制仿真,經(jīng)過參數(shù)整定,獲得了良好的仿真結(jié)果。對(duì)比PD-ADRC和PD-LADRC仿真結(jié)果,在四旋翼無人機(jī)飛行系統(tǒng)的應(yīng)用中,LADRC參數(shù)少、易整定,且控制精度更高,跟蹤速度更快,具有更強(qiáng)的抗干擾能力、魯棒性,更符合工程實(shí)際的需求。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17