基于鄰域跟隨與辨識的無人機集群控制與規避策略
2018-09-27 11:59:04張代兵李小民董海瑞杜占龍
系統工程與電子技術 2018年9期
毛 瓊, 張代兵, 李小民,3, 董海瑞, 杜占龍
(1. 中國人民解放軍陸軍工程大學石家莊校區無人機工程系, 河北 石家莊 050003; 2. 國防科技大學 智能學院, 湖南 長沙 410073; 3. 石家莊鐵道大學電氣與電子工程學院, 河北 石家莊 050003)
0 引 言
多架無人機(unmanned aerial vehicles, UAVs)彼此協同完成軍事目標打擊、目標跟蹤與偵察等任務可大幅度減少任務執行的時間、提高作戰的效率和成功率[1-2]。隨著作戰環境的日趨復雜,空間無人機的數量和密度上升,強電磁環境易使無人機通信致盲以及潛在的突發障礙等問題給無人機集群的飛行控制與安全帶來一系列挑戰[3-4]。
無人機集群系統屬于局部感知或通信的分布式體系結構,目前主要的控制方法有:基于局部規則的控制[5-7]、軟控制[8-10]、領航跟隨法[11-14]和人工勢場法[15-23]。基于局部規則的控制方法最基礎,能實現集群智能的涌現控制,但是難使集群涌現到期望的控制方向;軟控制是在局部規則的基礎上通過為集群加入一外部可控的無人機,引導群內其他無人機朝著人們期望的方向運動,文獻[10]利用其成功實現了分群;領航控制法利用集群中信息豐富的無人機引導實現集群控制,文獻[7]針對部分無人機獲得航跡信息進行了研究,直接將掌握航跡信息的無人機設為領導者和不掌握航跡信息的無人機設為跟隨者,沒考慮無人機如何辨識誰是領導者的問題;人工勢場法通過構建全局勢場函數引導智能體向勢能降低的方向運動,該方法簡單實用,在避障方面有優勢,但存在局部極值問題。
本文以上述方法為基礎,研究了理想全通信環境下所有無人機都能獲得目標航跡信息和電磁干擾環境下部分無人機能獲得目標航跡信息條件下的集群控制方法。對于第一種情況,本文將局部規則與勢場法融合改進引力和斥力函數,并結合軟控制方法控制無人機涌現出群聚行為和使集群沿著指定的航跡運動,針對未知突發障礙,在有限視覺感知的基礎上采取應急避障的方法處理,并借助于運動環境的動態性幫助無人機擺脫局部極值;對于第二種情況,在文獻[7]的基礎上采用鄰域辨識的方法為未獲得航跡信息的無人機選擇跟隨目標,構成局部的領航控制模式,使無人機逐漸聚集和沿著指定航跡飛行。
1 基于集群智能的UAVs系統建模
1.1 群內部成員模型
無人機集群屬由N個無人機組成的分布式系統,每個無人機的運動可用一個6自由度的運動方程表示[15],經微分同胚[16]后可抽象為
,i=1,2,…,N
(1)
式中,Pi(x,y,z)表示無人機i的空間位置;vi表示速度;ai表示加速度。通過在制導系統環節設計加速度ai可控制無人機沿著預定路徑飛行,其他交由自動駕駛儀完成。
此外,無人機飛行時存在如下約束:
(1) 加速度約束
(2)
式中,Amax為無人機的最大加速度。
(2) 速度約束
(3)
式中,Vmax為無人機的最大運動速度。
1.2 無人機的運動控制規則
本文研究的分布式無人機系統的整體運動受無人機運動規則控制,是無人機間局部交互產生的一種涌現行為。根據無人機行為交互對象的不同,可將集群內部無人機的運動分解為3個子目標:保持群聚、奔向目標和規避障礙,因此受鄰近無人機群聚力、目標的吸引力與障礙的排斥力三者的綜合作用,對無人機質量進行歸一化處理后其運動控制量ai可表示為

(4)
式中,等號右側第1項為目標吸引產生的控制分量;第2項為規避障礙的控制分量;第3項為同集群的其他鄰居無人機j對無人機i產生的吸引控制分量;α為無人機能否正常接收目標航跡信息的標志,α=1表示無人機i能正常接收航跡信息,此時式(4)等號右側第4項為0;α=0表示無人機i不能正常接收航跡信息,此時式(4)等號右側第1項為0,第4項不為0,表示無人機i需從鄰域內選擇無人機G進行跟隨;γ1、γ2和γ3為各個控制分量的權重,由于無人機i在接收不到目標航點的情況下把無人機G當做目標航點進行追隨,所以式(4)等號右側第1項和第4項的控制強度系數相同且均為γ1,集群內部無人機的運動控制主要通過設計ai實現。
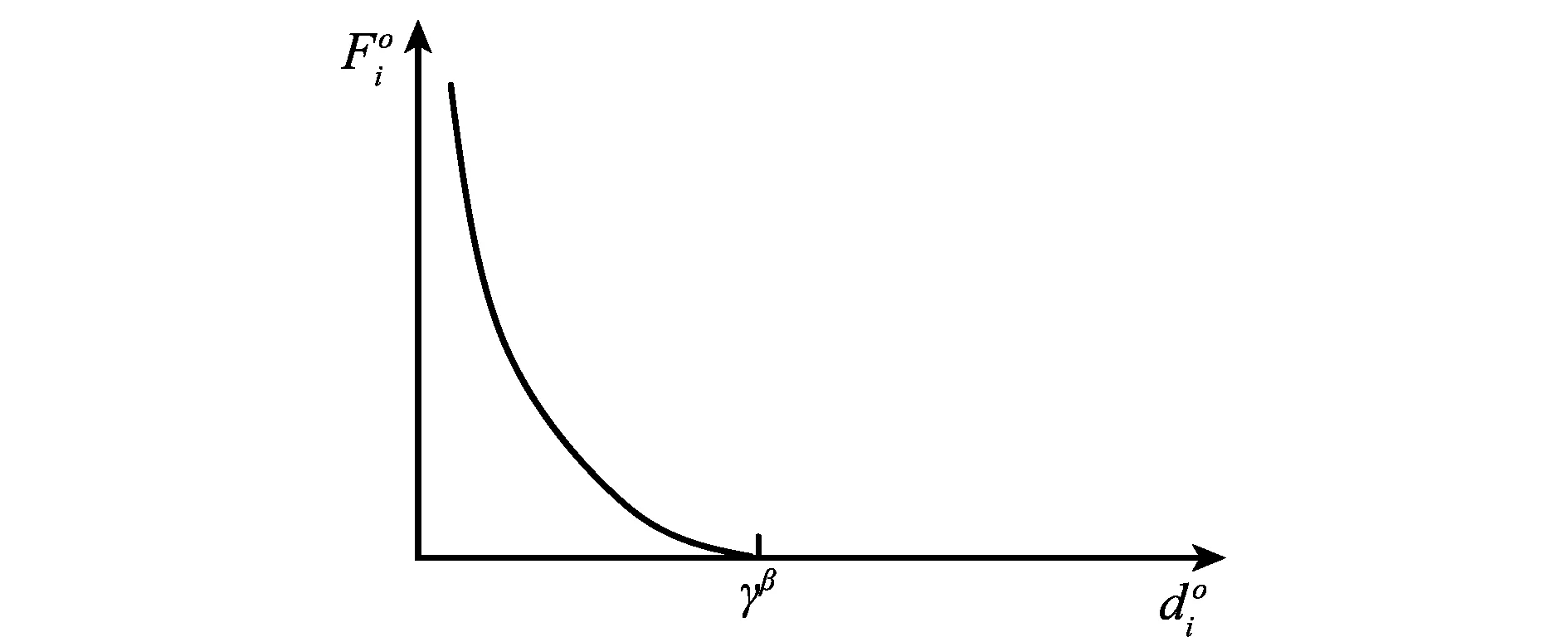
1.2.1 群聚運動的控制
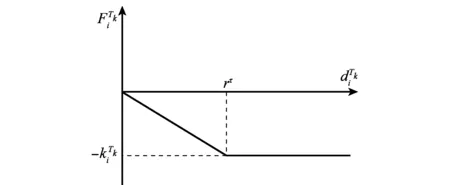
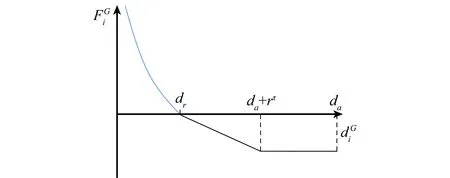
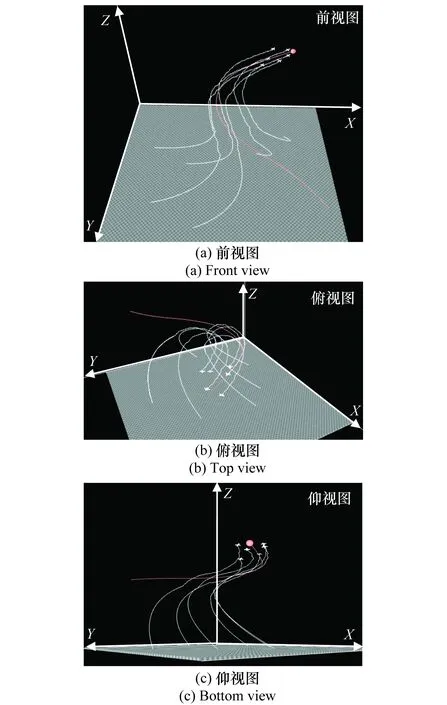
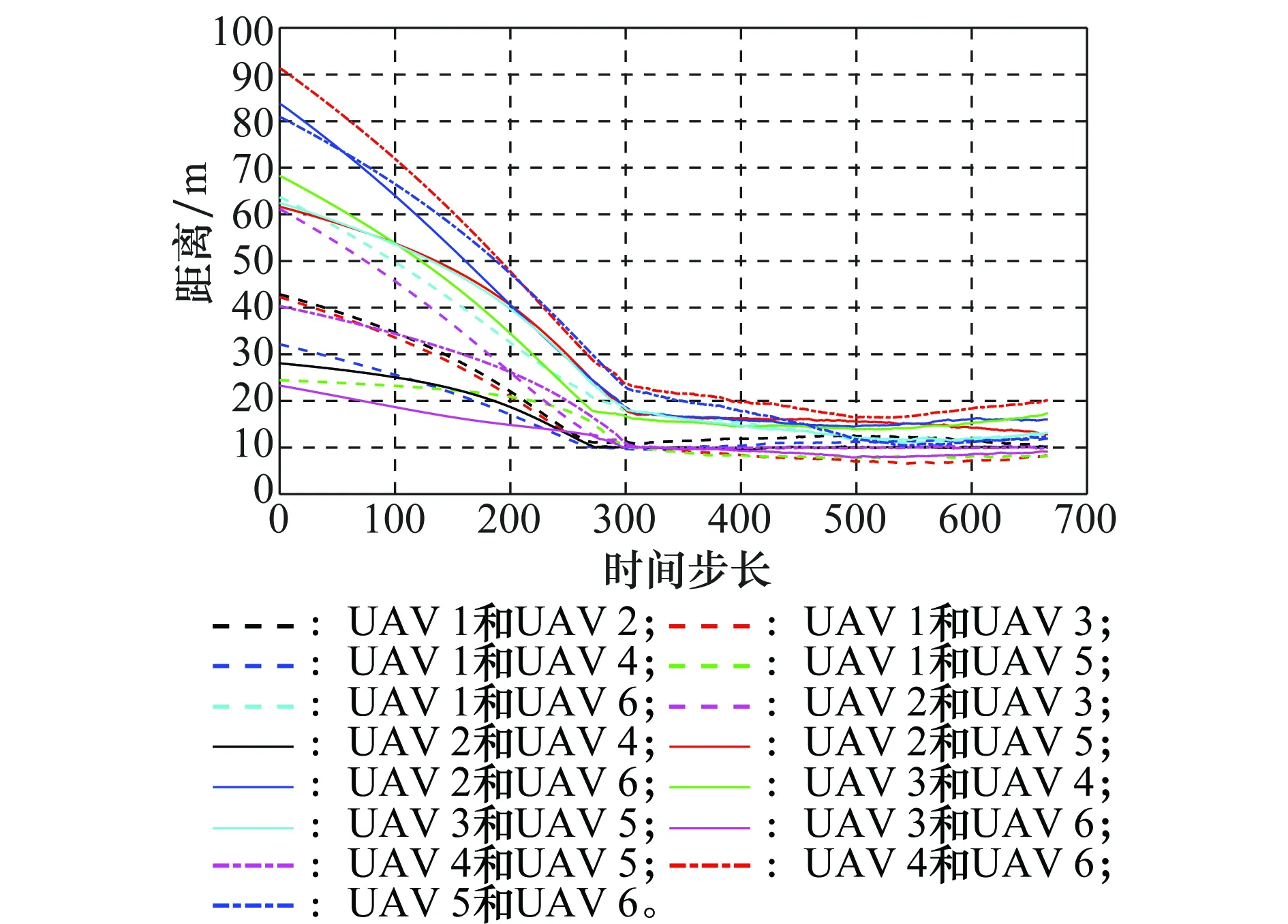
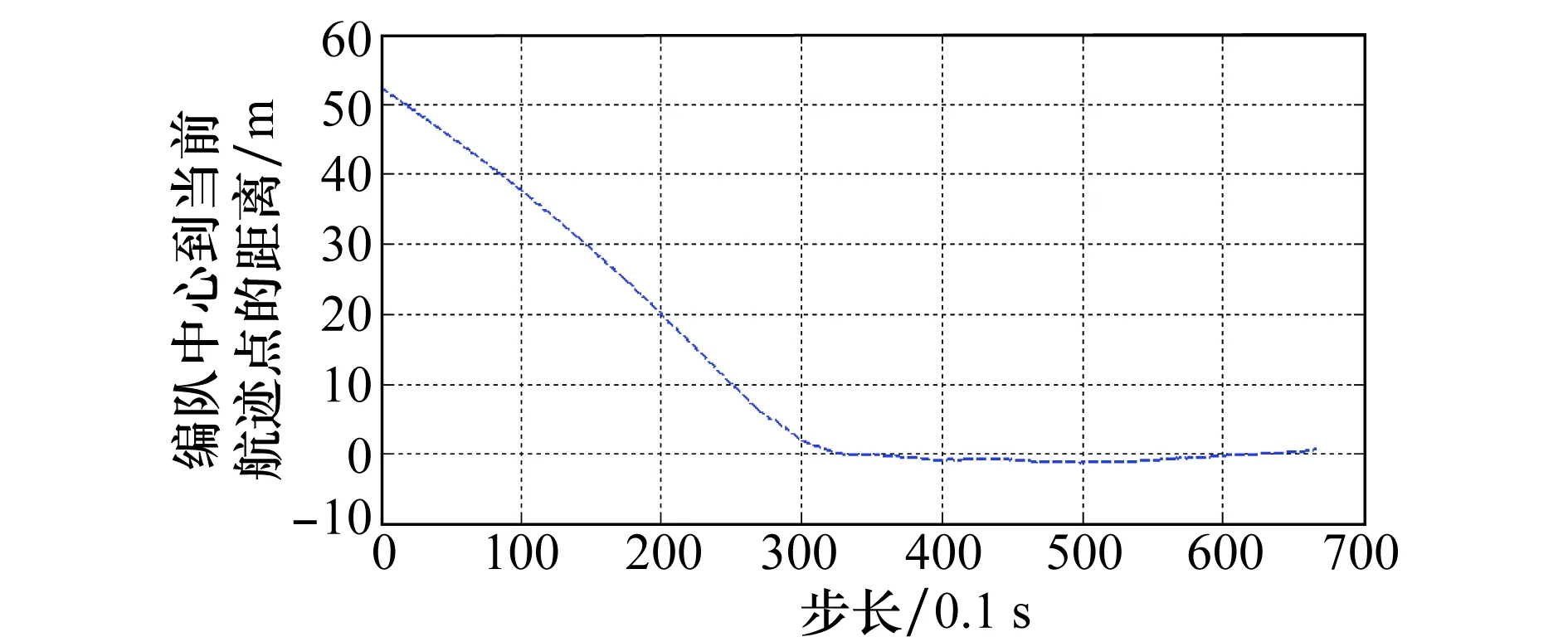
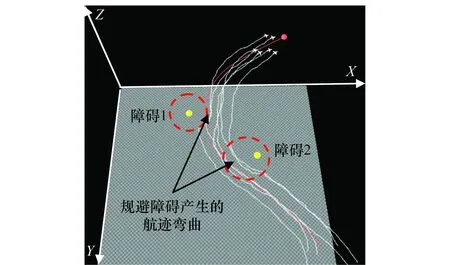
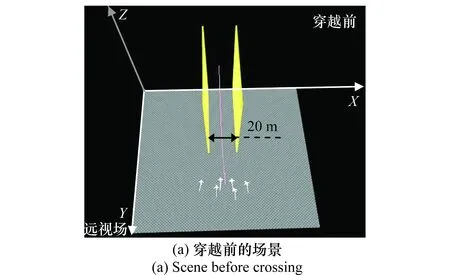
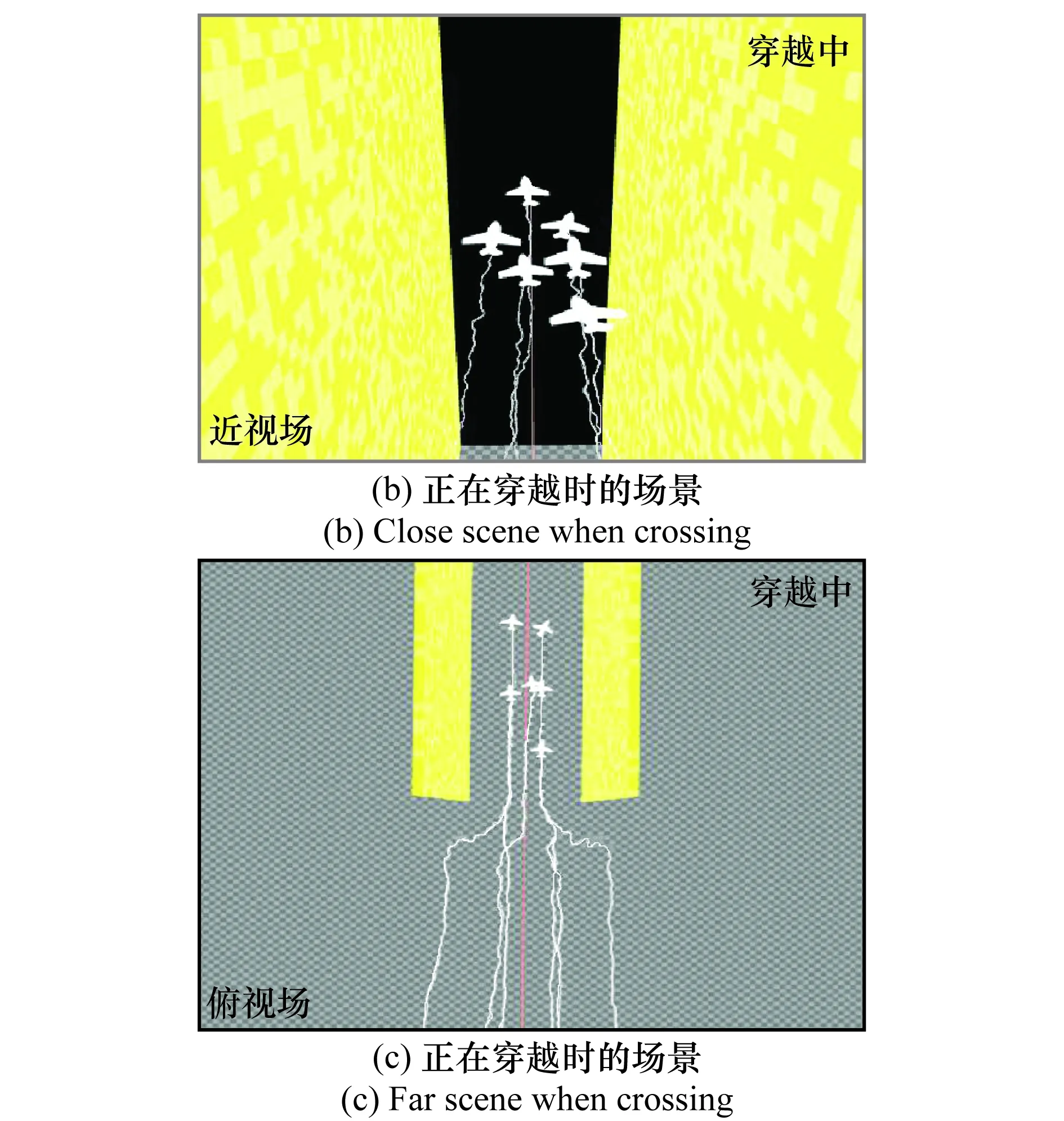
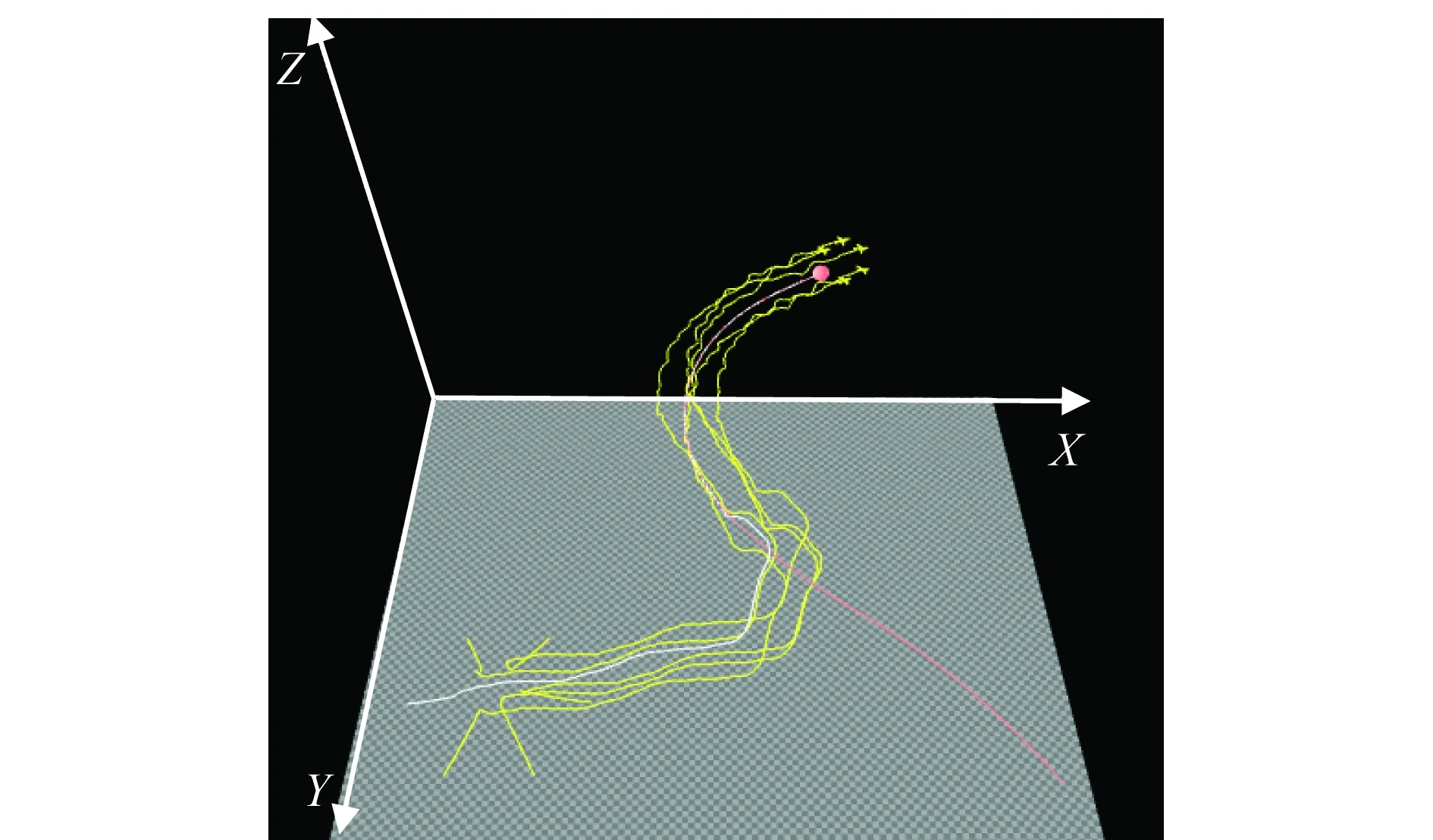
傳統的基于局部規則的控制方法對控制無人機群聚效果明顯,主要建立在排斥域、一致域和吸引域3個感知域的避撞、結隊和聚集3個運動規則基礎上。設無人機i通過機載傳感器感知周圍無人機的位置、速度,探測距離為da,其探測區域為以無人機i所在的位置為中心,da為半徑構成的圓形區域,t時刻落在無人機i的探測區域內的無人機用集合Ni(t)表示。在該探測區域內,以dr和do為界(0 (5) (6) (7) (8) 圖1 無人機i和無人機j之間的作用力Fig.1 Force between UAV i and UAV j 1.2.2 朝向目標的運動控制 為控制無人機集群前往目標區執行任務,首先將無人機集群作為一個整體進行航跡規劃,以減少路徑規劃的復雜性;其次將航跡分解成一系列序列位置點Track={T1,T2,…,Tm};通過自動相關監視廣播系統(automatic dependent surveillance broadcast,ADS-B)將上述序列位置點的位置和速度信息按著時間順序向各架無人機播發,隨著時間的推進,目標航點信息被更新,從而控制和引導集群成員沿著規劃的路徑飛行和到達目的地。該信息分發系統可布置于集群內部的任意一架無人機,也可布置在有人機或地面控制站,且布置在有人機或地面控制站時可靈活改變航點信息,提高集群控制的機動性和靈活性。根據機載廣播式自動相關監測設備接收端(ADS-B IN)能否正常接收航點信息,可分為以下兩種情況。 (1)所有無人機均可獲得航點信息 (vi-vTk) (9) (10) (11) 圖2 無人機與目標之間的作用力Fig.2 Force between the UAV and target (2) 少部分無人機可獲得航點信息 由于強電磁干擾易使無人機的通信中斷導致其不能獲得目標航點信息,在此情況下需要尋找其他的途徑以補償目標信息缺失帶來的風險,如借助于機載傳感系統對附近其他無人機的位置和速度進行測量,此時未接收到航點信息的無人機在第1.2.1節的群聚作用下仍能繼續維持群聚運動,但隨著掌握航點信息無人機的比例下降到1/3以下時,無人機經常產生脫離集群的現象(文獻[7]中描述),且隨著掌握航點信息無人機的比例下降,集群內無人機飛行路徑的平滑度大幅度下降,給集群的控制與安全帶來了很大的困難。為改進該問題,文獻[7]令領導者開啟局部導航通信功能向周圍無人機發送航點信息,這在復雜電磁干擾環境中不現實,本文提出基于機載探測系統的鄰域感知與辨識的方法,幫助未接收到航點信息的無人機i從其鄰域Ni(t)內捕捉運動變化最快的無人機G,即將其當做目標航點進行跟隨。 (12) (13) (14) (15) 無人機與目標無人機之間的作用力如圖3所示。 圖3 無人機與目標無人機之間的作用力Fig.3 Force between the UAV and target UAV 1.2.3 規避障礙的運動控制 集群沿著預定航跡飛往目的地的過程中,會遇到障礙的威脅。無人機為保證自身的飛行安全,需要對障礙物進行規避。根據障礙事先是否已知可分為已知障礙威脅和未知障礙威脅。對于已知障礙威脅,可在航跡規劃階段進行初步處理,飛行過程中無人機主動進行規避;對于未知障礙威脅,則依賴于機載傳感器的探測能力、計算機信息處理速度和執行機構的動作時間等眾多因素。本文討論未知威脅,為了與實際情況相符,設無人機i的探測距離為da,機載計算機信息處理和執行機構響應的時間總和為τ=0.25 s,無人機自探測到障礙的時刻起τ秒后立即采取相應的應急避障策略,二者之間通過式(16)斥力函數進行設計。 (16) (17) (18) 圖4 無人機與障礙之間的作用力Fig.4 Force between the UAV and obstacle 對集群而言,如果集群內部無人機之間的距離保持不變,則說明其具有良好的穩定性和魯棒性。為簡化穩定性分析過程,本文首先考慮集群內部只有兩架無人機i和j的情況,它們在彼此的可探測距離之內。設x1和x2為系統的兩個狀態變量,根據式(1)有 (19) 將兩機視為一個系統,考慮系統內部狀態的穩定性,由式(1)和式(4)得 (20) (21) 再利用式(7)求負梯度得 (22) 設李雅普諾夫函數為 (23) 對李雅普諾夫函數求導,得 (24) 將式(22)代入式(24),得 ≤0 (25) 由式(25)知,兩機速度漸進趨于一致,即二機之間的距離也趨于一定值,系統達到穩定狀態。 再次假設集群內部有3架無人機,編號分別為1、2、3,且各自在彼此的探測范圍內。以無人機2為例進行穩定性分析,其鄰居為1和3,按上述方法設狀態變量為 則 (26) 設李雅普諾夫函數為 (27) 則 (28) 用式(26)代替式(28)中速度的一階導數項得 (29) 令 (30) 設李雅普諾夫函數為 (31) 則 …+ (32) 同理,將式(30)代入式(32)得 ≤0 (33) 即系統穩定。 為方便對上述方法的控制效果進行分析,本文在Netlogo環境下進行了三維空間的無人機集群飛行與障礙規避仿真驗證。由于本文提出的控制方法屬于分布式的集群控制方法,集群內部的每個無人機成員依靠自身的機載傳感器探測周圍其他運動和靜止目標,生成局部運動環境,并自動解算和生成相應的運動控制指令,控制自身行為。按著無人機能否接收航點信息,仿真實驗主要從以下幾方面展開。 情形1集群內部無人機均能獲得實時航跡信息,飛行空間無障礙 圖5 無人機群聚集和沿航跡飛行Fig.5 UAV individual gather and fly along the track 圖6 無人機之間的距離Fig.6 Distance between UAVs 圖5中紅色曲線為預先規劃的航跡,白色曲線為集群內部成員的飛行航跡,其初始位置隨機,在接收到目標航點信息后朝目標位置飛行,逐漸靠近、聚集和形成一整體,并沿著航跡飛行,實現了集群的群聚和整體運動控制。 圖6顯示了任意兩機間距離變化的情況,曲線的走向趨勢表明:任意兩機間的距離在初始時刻最大,隨著時間的推移逐漸收斂至一恒定值,此時集群進入穩定狀態。在該過程中,由于任意兩機間的最小距離為7.8 m,大于機身長度2 m,因此避免了碰撞的發生。 圖7 編隊中心與航點的距離偏差Fig.7 Distance between the formation center and the track point 情形2集群內無人機均能獲得實時航跡信息,飛行空間有未知障礙 圖8 集群躲避障礙的場景Fig.8 Scene of UAVs to avoid the obstacles 圖8中黃色的球體即為障礙所在的位置,紅色的曲線為預先規劃的航跡,由于規劃時不知道未來障礙的突發位置,所以在預先航跡規劃時未對障礙1、2進行考慮,此時無人機對障礙的規避將主要依靠機載的傳感器檢測系統、障礙規避算法和其他控制以及執行機構。從圖8顯示的各機航跡看到,無人機在接近障礙物時發生明顯背離障礙的側向彎曲,即為機載傳感系統檢測到障礙和機體產生的規避行為,說明各架無人機能夠依靠自身能力有效避開突發障礙的威脅;圖9顯示的是集群內部各個成員分別與障礙1和障礙2之間的距離隨時間的變化曲線,圖9中的2個最低谷為集群內成員分別與障礙1和障礙2最接近的時刻,由圖9可見,集群內部的無人機仍與障礙物保持10 m以上的距離,有效地規避了障礙。采用情形1的數據分析方法同樣可得各機間的最近距離為4.3 m,仍大于機身長度值2 m,能夠避免集群內部成員之間的碰撞。 圖10 集群穿越狹窄區域Fig.10 Cluster crosses the narrow area 情形3集群內部少數無人機可獲得實時航跡信息,飛行空間無障礙 圖11 基于鄰域辨識的集群控制Fig.11 Cluster control based on neighborhood identification 從圖11看到,集群內部有6架無人機,但只有1架能夠接收航跡信息(標注為白色,占群體數的1/6),采用鄰域跟隨與辨識的方法為未接收到航跡信息的無人機選擇跟隨目標,無人機能在群聚作用和目標無人機的帶領下從初始狀態聚集和形成整體運動。同時,本文也按著文獻[7]的方法對未接收到航跡信息的無人機采用群聚作用實施了控制,雖然也能產生聚集和整體運動(見圖12),但與圖11相比,飛行航跡過于曲折,對集群控制與安全不利。相比之下,顯然采用鄰域跟隨與辨識的方法要好于僅采用鄰域跟隨的方法。 圖12 群聚作用下的集群控制Fig.12 Cluster control under the clustering 本文受群體智能的啟發,研究了無人機能正常接收和不能正常接收目標航跡信息以及空間有無障礙情況下的集群控制問題,應用此方法有以下結論: (1)本文將群聚規則與勢場法結合和改進實現了無人機的聚集和朝向目標的整體性運動,無人機集群控制的靈活性、一致性和安全性都有了較大提升; (2)由于借助于虛擬無人機的運動模擬目標航跡,這種類似軟控制的方法可通過修改航點靈活改變集群的飛行航線; (3)本文提出的對障礙物的應急避障方法考慮了計算機處理和設備的執行時間,符合實際情況。













2 穩定性分析







3 仿真實驗驗證




4 結 論
猜你喜歡
兒童故事畫報(2019年5期)2019-05-26 14:26:14
中華手工(2017年2期)2017-06-06 23:00:31
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
中外會展(2014年4期)2014-11-27 07:46:46
建筑創作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32
祝您健康(1987年2期)1987-12-30 09:52:28