基于紅外載波調制和RS485總線的液壓支架遙控裝置研究
2018-09-28 02:41:40許春雨田慕琴宋建成馬旭東宋單陽張潤冬
中國煤炭 2018年9期
關鍵詞:支架
陳 昆 許春雨 田慕琴 宋建成 馬旭東 宋單陽 張潤冬
(1.太原理工大學,山西省太原市,030024;2.煤礦電氣設備與智能控制山西省重點實驗室,山西省太原市,030024;3.礦用智能電器技術國家地方聯合工程實驗室,山西省太原市,030024)
液壓支架是綜采工作面不可或缺的支護設備,主要用于綜采工作面頂板支護,為操作人員提供作業空間。當前,我國煤礦生產主要依賴操作人員使用電液控制系統對鄰近液壓支架進行手動控制,盡管采用鄰架操作一定程度上保證了操作人員的人身安全,降低了勞動強度,但由于存在井下支架數量多、煤層結構復雜、操作視線受干擾、操作空間受限等問題,需要一種無線裝置對液壓支架進行近距離無線遙控。
無線電頻段和紅外頻段是適用于高速、短程無線通訊的主要頻段。無線電波長長、發射能量分散,無法滿足煤礦井下復雜電磁環境下通訊可靠性要求;紅外頻段具有波長短、發射能量集中、抗干擾能力強、有一定的方向性等特點,是實現液壓支架精準、可靠、穩定遙控的有效手段。本文提出了基于紅外線載波調制和RS485總線的液壓支架電液遙控策略,闡述了遙控裝置的控制過程,實現了對綜采工作面多支架、多功能的近距離無線遙控,具有一定的應用價值。
1 遙控方案
1.1 遙控裝置功能
針對煤礦綜采工作面液壓支架數量多、控制流程復雜、作業周期長等特點,液壓支架遙控裝置應具備以下功能:
(1)鄰架遙控功能。遙控發射器需對全工作面各支架的立柱、伸縮梁、平衡梁、一二級護幫、側護板的伸收以及推鎦、拉架、提底、噴霧等動作進行遙控。《煤礦安全規程》規定,液壓支架電液控設備不允許對本架進行操作,因此遙控發射器只能對左右鄰近多臺支架進行遙控。
(2)成組遙控功能。支架成組動作通常包括成組推鎦及拉架動作。以成組推鎦為例,遙控發射器需按工藝要求設定成組推鎦架數,成組遙控命令發送后,采煤機后滾筒后10~15架處開始成組沿割煤方向執行多架成組推餾功能。
(3)小循環操作功能。遙控發射器應具備液壓支架多動作一鍵控制功能。一個完整的小循環功能主要包括降柱、提底、拉架和升柱,按照降柱-提底-拉架-升柱的順序依次執行。
1.2 遙控操作策略
為了適應煤炭生產作業連續性以及綜采設備操作便捷性的需要,遙控發射器需在遙控策略上滿足快速性、可操作性及靈活性的設計要求,其外部結構設計如圖1所示。

圖1 遙控發射器外部結構圖
遙控發射器采用本安型便攜式設計,由支架工手持操作。當鄰架遙控時,使用當前架號兩端預選按鍵確定當前支架號,使用目標架號兩端預選按鍵確定目標支架號,通過功能鍵輸入動作類型,即可對待控支架各動作進行遙控操作。當成組遙控時,選定待控支架后,先選擇成組命令鍵,再按下工藝流程對應的成組動作即可。由于井下支架動作的特殊性,成組參數需在生產技術部門統一商定后,在支架控制器內部進行設置。小循環操作與成組遙控過程類似,采用左成組與右成組兩按鍵同時按下表示小循環命令。
1.3 遙控裝置控制結構設計
本文設計的液壓支架遙控裝置由遙控發射器和接收電路組成,遙控裝置結構框圖如圖2所示。
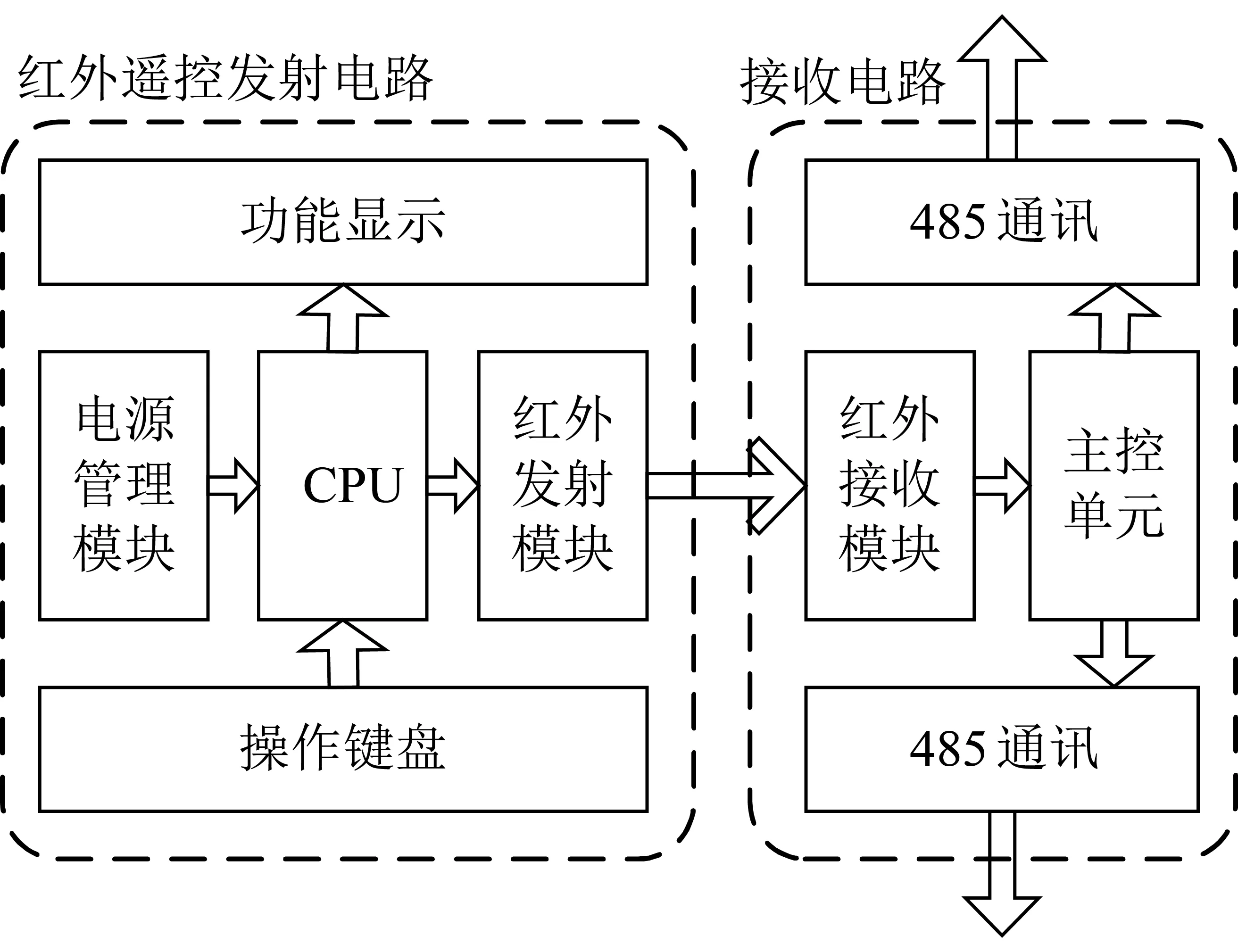
圖2 遙控裝置結構框圖
遙控發射器主要包括電源管理模塊、操作鍵盤、主控CPU、功能顯示及紅外發射模塊。其中,電源管理模塊集成了充電管理、電量監測、節電優化功能,保證了便攜式裝置在井下長時間生產作業的續航要求。主控CPU將操作人員通過鍵盤輸入的控制信息進行編碼處理后,由紅外發射模塊向外發出。功能顯示區可顯示當前支架號、目標支架號、動作命令及電量信息,方便生產人員進行操作。
接收電路集成在各支架控制器的內部,由紅外接收模塊、主控CPU及左右兩路485通訊電路組成。紅外接收模塊接收到遙控器發出的遙控命令進行載波信號的轉碼,將紅外線信號轉換為可供單片機讀取的數字信號。單片機對數字信號進行二次轉碼,轉換為符合支架控制器內部通訊協議的控制信號,通過左右485通訊電路傳輸到目標支架控制器,完成對目標支架的遙控。
2 遙控裝置硬件設計
2.1 遙控發射器硬件設計
在對液壓支架近距離遙控操作過程中,遙控發射器主要完成當前架號確認、目標架號選擇、動作命令發送等一系列功能,遙控器硬件電路需要滿足通信穩定性、操作便捷性及續航可靠性等要求。
遙控發射器硬件電路由CPU、JTAG調試接口、外部晶振、充電管理、礦用鋰電池組、電源穩壓電路、鋰電池充電指示電路、紅外信號編碼及其發送電路、矩陣式鍵盤及LCD顯示電路組成。遙控發射器硬件結構如圖3所示。
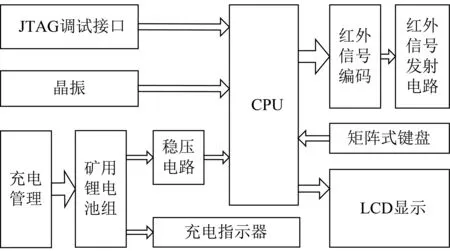
圖3 遙控發射器硬件結構
遙控發射器內部以C8051F020單片機為處理核心。C8051F020作為一款8位定點運算單片機,時鐘頻率可達25 MHz,不僅運算速度快、運行功耗低、硬件資源豐富,還具備靈活的外設配置功能,允許通過設置交叉開關對外部設備接口進行功能配置。
電源管理模塊選用目前較為成熟的礦用可充電鋰電池組作為設備電源。充電管理模塊內部采用CN3052A型充電管理芯片對設備進行恒流/恒壓模式下的高效、安全充電。該芯片內部集成了功率晶體管,電路結構簡單、高效可靠。
充電指示器電路使用LM339四路差動比較器設計,可以在設備充電狀態下,通過四路LED指示燈顯示充電完成情況。電量監測環節利用了鋰電池端電壓隨電量值變化關系,通過將電池兩端電壓送入單片機片內AD采樣計算,將設備剩余電量值在遙控器顯示面板實時顯示。
紅外信號編碼電路選用PT2262芯片進行信號編碼。PT2262是目前無線通訊領域最常用的芯片之一,最多有12位(A0~A11)地址碼管腳、6位(D0~D5)數據碼管腳。經過硬件內部編碼,設定的地址位和數據位可從Dout端以38 kHz載波形式,經由兩級功率放大電路通過紅外發射管發射出去。
2.2 接收電路硬件設計
本文設計的液壓支架遙控裝置將接收電路集成在支架控制器內部,與整套電液控系統結合為一體,協同運行。傳統的液壓支架電液控系統通常設置有基于紅外信號識別的采煤機位置檢測電路。為了與現有系統充分融合,避免兩種紅外信號下的解碼干擾,對紅外接收電路進行了設計優化。系統整體配置結構如圖4所示,接收電路硬件結構如圖5所示。
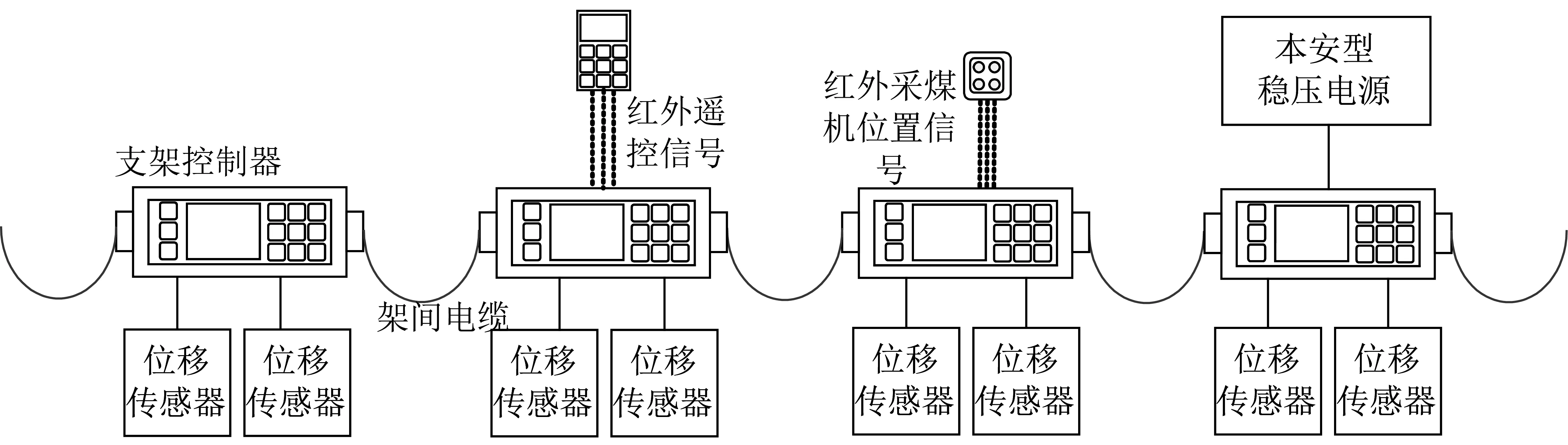
圖4 系統整體配置結構
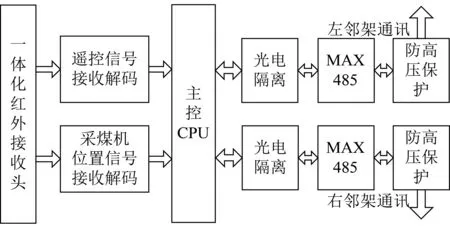
圖5 接收電路硬件結構
液壓支架遙控裝置接收電路主要分為紅外信號通訊和RS485信號通訊兩路通訊結構。其中紅外信號通訊包括一體化紅外接收頭、遙控信號解碼電路和采煤機位置信號解碼電路,RS485通訊主要包括左鄰架和右鄰架兩路通訊電路。
一體化紅外接收頭選用HS0038模塊,其集紅外線接收、前置放大和解調電路于一體,中心頻率為38 kHz,可改善自然光的反射干擾,輸出脈沖穩定,可準確還原遙控器發出的載波信號。
遙控信號及采煤機位置信號接收解碼電路使用PT2272-M5遙控解碼器,該芯片外部包含7位地址引腳及5位數據引腳。考慮到綜采工作面液壓支架數量多,有時甚至多達200余臺,因此在信號傳輸過程中,設計了地址碼復用及功能碼分時發送的編碼方式。
RS485通訊主要由2路RS485通信總線構成,分別包括光電隔離、MAX485及防高壓侵入保護電路。MAX485芯片用于將通信信號轉變為RS485通信協議信號,光電隔離和防高壓侵入保護電路則保證了通信過程的安全穩定。
3 紅外遙控編碼設計
3.1 紅外編碼結構
井下工作面電磁環境復雜,且液壓支架數量較多,各支架緊密連接,遙控發射器任一時刻發出的遙控命令都會被多臺支架同時接收。為了提高無線通訊的準確性及抗干擾能力,需要設計可靠的無線通訊協議以確保無線信號的可靠傳輸。
PT2262紅外編碼芯片采用2個周期占空比為1∶3的波形來表示數字量“0”以及2個周期占空比為2∶3的波形來表示數字量“1”,發出的編碼信號由地址碼、數據碼、同步碼組成一個完整的碼字。液壓支架遙控器數據幀格式見表1。
將當前支架架號作為地址碼,可以從硬件上防止不同支架同時接收到遙控信號而造成通訊干擾,引起誤動作。

表1 遙控器數據幀格式
3.2 紅外解碼方式
對PT2262常用的解碼方法有硬件解碼和軟件解碼。硬件解碼是采用專用的PT2272解碼芯片,當發射器與接收電路設定相同的地址碼時,在有效的通信距離內,接收電路可正確解碼載波信號。硬件解碼速度快、使用方便,應用方案較為成熟。軟件解碼是通過對紅外接收頭輸出波形的分析,由CPU來進行解碼。軟件解碼配置靈活,不受發射端地址碼配置的影響,但解碼速度較慢,完成單功能的解碼需100 ms左右的時間,無法滿足井下液壓支架控制的快速性要求。
本文設計了基于PT2272專用解碼芯片的硬件解碼電路。由于PT2262每次至少發射四組字碼,第一組字碼容易受零電平干擾,從而產生誤碼,因此PT2272只有在連續兩次檢測到與自己相同的地址碼時,才會判斷為遙控信號接收正常。
3.3 二進制編碼壓縮
隨著綜采自動化技術的廣泛推進,單個綜采工作面液壓支架布置規模甚至已經多達200余臺,對其進行立柱、伸縮梁、平衡梁、一二級護幫、側護板的伸收,及推鎦、拉架、提底、噴霧等各功能日趨完善,一臺液壓支架遙控器需要實現對整個工作面液壓支架各功能的準確遙控。以200臺液壓支架、16個單動作、8個成組動作及1組工藝設定小循環動作為例,就需要至少8位地址碼、13位功能碼來實現遙控功能。這必然會導致紅外通訊編碼冗長,不利于遙控命令的編碼和傳輸。因此,本設計需要對紅外編碼信號進行壓縮和優化處理。
3.3.1 地址碼復用
以隔架單動作遙控為例,在30號支架位置,操作人員需要對右側32號支架進行“推鎦”操作:當前架號為30,其二進制對應為:m1=00011110;目標架號為32,其二進制對應為:n1=00100000。假設“推鎦”動作設定為第“5號”動作,其動作編碼二進制對應為:p1=00101。因此,該動作遙控指令對應的紅外編碼應為:D1=000111100010000000101。
考慮到井下液壓支架數量及紅外線傳播距離等因素,本裝置采用了地址碼復用的編碼設計。設當前支架號為M,當前支架號對應二進制碼為m1,見式(1):
(1)
式(1)中DEC2BIN函數表示為十進制數對應的二進制碼值,通過地址碼復用的方法,將整個工作面每128臺支架作為一組,從而實現分組控制。
3.3.2 限制可控區間
由于液壓支架電液控制系統不允許本架控制本架,必須在控制支架的相鄰架或者是相隔架進行操作。同時受制于井下操作視野范圍,本裝置按照就地手動控制模式技術要求,將可控區間限制為左右各4架,采用方向標志位與控制距離來確定目標架號,則目標架號編碼二進制見式(2):
(2)
以上操作示例中,目標架號對應二進制數為:n1=101。
3.3.3 功能碼分時復用
為了進一步壓縮編碼結構,提高紅外通訊穩定性,本裝置設計了功能碼分時復用模式。通過液壓支架遙控發射器主控CPU內部控制單元,將每段功能碼分為兩組數據分時發送,并用標志位加以區分。接收電路通過判別標志位狀態,將兩組數據同時接收并處理,從而還原出發射器端發出的控制命令。結合目標架號的編碼規則,動作編碼二進制見式(3):
(3)
以上操作示例中,動作編碼二進制見式(4):
(4)
該動作遙控指令對應的紅外編碼見式(5):
(5)
本文所設計的編碼結構,將當前液壓支架架號作為地址碼,地址碼范圍設定為0000001~1111101(排除了0000000和1111111兩組易產生誤碼的地址碼),超過125架則進行地址碼復用。采煤機位置檢測電路紅外地址碼設定為1111110,與采煤機紅外發射器相匹配,用以實時采集采煤機位置信號。
功能碼復用設計會在任意功能按鍵按下之后連續發送兩組功能信息,經過紅外接收電路解碼后,單片機掃描功能引腳將數據存入工作區,并生成最終功能控制碼。以右鄰架控制為例,按鍵功能對應編碼見表2。
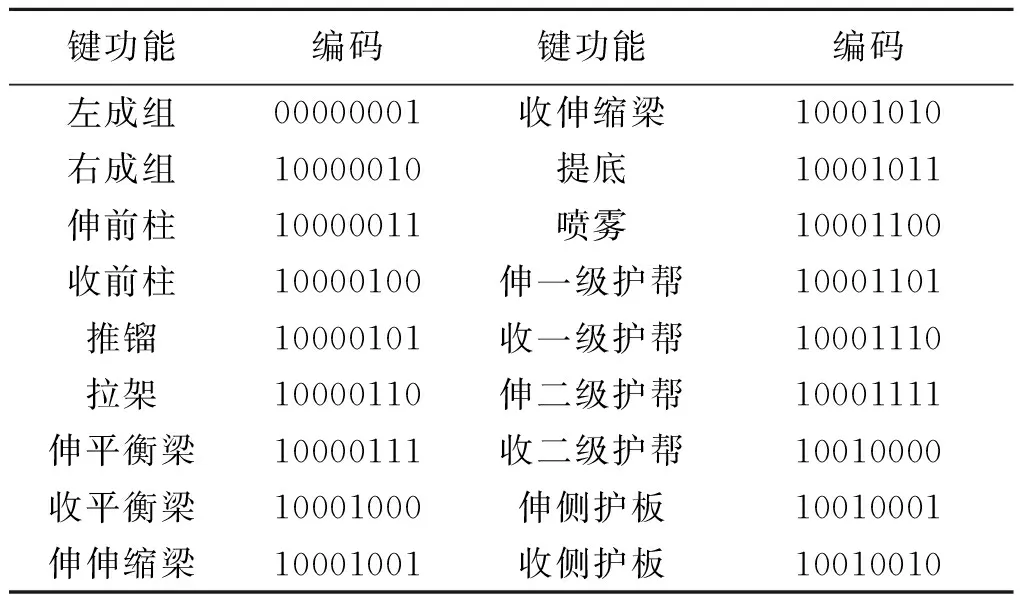
表2 按鍵功能對應編碼
單動作遙控時,功能碼包含鄰架方向信息、預選架號信息及動作信息。成組動作遙控時,功能碼包含成組方向信息及成組動作信息。
4 遙控裝置軟件設計
4.1 遙控發射器軟件設計
為了最大限度地降低系統功耗,遙控發射器在處于休眠狀態時,系統將關閉液晶顯示背光。按鍵采用中斷觸發方式,上電啟動后立即進入休眠模式,當有按鍵按下時,觸發外部中斷喚醒CPU。另外,本系統在軟件和硬件上設計按鍵防抖功能,確保按鍵指令的正確輸入。
遙控發射器主程序的主要功能是完成對8051F020及外圍電路的初始化和開中斷,并進入等待模式。一旦產生中斷,喚醒CPU進入工作模式,調用相應的按鍵處理子程序進行命令碼的處理,并將處理后的數據發送到紅外編碼芯片。遙控發射器主程序流程如圖6所示。
4.2 紅外接收子程序設計
紅外編碼芯片PT2262發出的編碼信號由地址碼、數據碼、同步碼組成一個完整的碼字。解碼芯片PT2272-M5接收到信號后,其地址碼經過兩次比較核對后,VT腳才輸出高電平,同時相應的數據腳也輸出高電平。
通過對遙控信號標志位的提取,判斷某一時刻有無遙控命令發射。一旦判為有效,可將命令碼存儲到指定工作區進行處理。處理后的命令碼應與支架控制器按鍵數據格式相匹配,跳轉到按鍵處理子程序中,并將紅外遙控信號與RS485通訊格式進行匹配。紅外接收子程序流程如圖7所示。

圖6 遙控發射器主程序流程
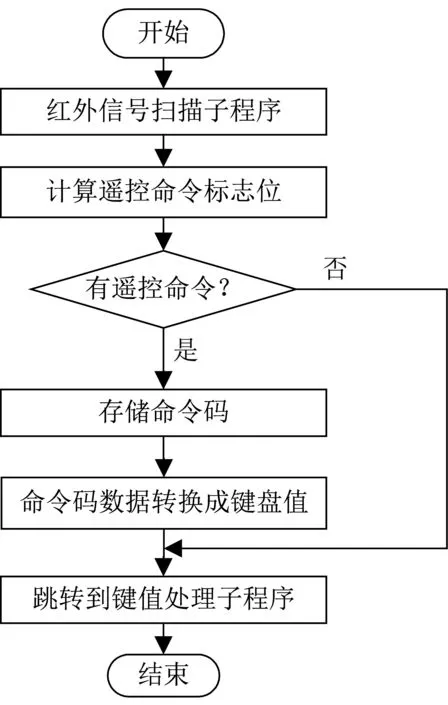
圖7 紅外接收子程序流程
5 試驗驗證
為了驗證上述示例中控制模式,在實驗室搭建煤礦無人值守綜采工作面液壓支架電液控制系統試驗平臺對所設計的紅外遙控裝置進行了試驗,試驗現場如圖8所示,當前架號及目標架號動作執行情況如圖9所示。

圖8 試驗現場

圖9 當前架號及目標架號動作執行情況
試驗過程中,使用硬件測試板內部主控單元驅動紅外發射單元作為遙控發射器,通過裝置內部單片機編譯程序參數,使之連續輸出特定紅外編碼信號以模擬遙控器動作命令。將發射裝置放在帶有紅外線接收頭的第30號支架控制器水平間距1m處,此時該控制器成功接收到紅外信號并伴隨指示燈閃爍,控制器進入遙控信號接收模式。同時,第32號支架控制器快速進入遙控命令執行模式,并準確輸出動作命令。
6 結語
本文基于綜采工作面生產要求,提出了一種基于紅外載波調制和RS485總線的液壓支架近距離遙控策略,開發了遙控發射和接收裝置,并采用硬件編解碼、編碼壓縮算法提高了通訊過程的實時性、可靠性和穩定性。通過手持式遙控裝置實現了對全工作面的鄰架遙控、成組遙控及小循環操作功能。試驗結果表明,目標支架能夠實時準確地接收到遙控器發出的紅外命令并迅速響應,實現了對液壓支架的近距離無線遙控控制。
猜你喜歡
保健醫苑(2022年5期)2022-06-10 07:46:12
小哥白尼(趣味科學)(2021年8期)2021-11-20 06:08:04
海洋信息技術與應用(2020年3期)2020-08-24 07:25:10
中國臨床醫學影像雜志(2019年5期)2019-08-27 02:48:00
中國生物醫學工程學報(2019年4期)2019-07-16 08:04:16
模具制造(2019年3期)2019-06-06 02:10:54
制造業自動化(2017年2期)2017-03-20 14:26:14
中國繼續醫學教育(2015年6期)2016-01-07 07:38:49
沈陽醫學院學報(2014年4期)2014-12-27 13:44:20
航天器工程(2014年5期)2014-03-11 16:35:55