空氣中聲速自動測量系統
2018-09-29 05:54:24劉永智解立強梁盛德
物理實驗 2018年9期
劉永智,解立強,梁盛德,2
(1.甘肅民族師范學院 物理與水電工程系,甘肅 合作 747000;2.南京大學 聲學研究所 近代聲學教育部重點實驗室,江蘇 南京 210023)
聲速是描述聲波在介質中傳播特性的物理量,聲音本質上是一種波. 聲速測量實驗是大學物理實驗教學中綜合性較強的內容,聲速測量常用的方法有共振干涉法和相位比較法[1]. 圖1為實驗裝置示意圖,S1是發射端,由壓電陶瓷超聲換能器向外發射超聲波,另一只壓電陶瓷超聲換能器S2作為接收端,接收聲音壓強信號,波速v、波長λ和頻率f之間存在v=λf的關系,因此可以通過測定聲波的波長λ和頻率f來求得聲速v. 在測量中接收端S2的移動和聲波在發射端S1與接收端S2間多次反射疊加的結果及聲波在空氣中的衰減、兩換能器界面的反射能量損耗、半波損失不影響測量結果[2],而介質的特性不同,聲速的大小不同. 針對大學物理實驗中測量空氣中的聲速實驗時,幅度最大值或示波器上相位角不易準確判斷及空氣的溫度、壓強、濕度特性對聲速也有影響等問題,設計了自動測量空氣中聲速值的實驗裝置.
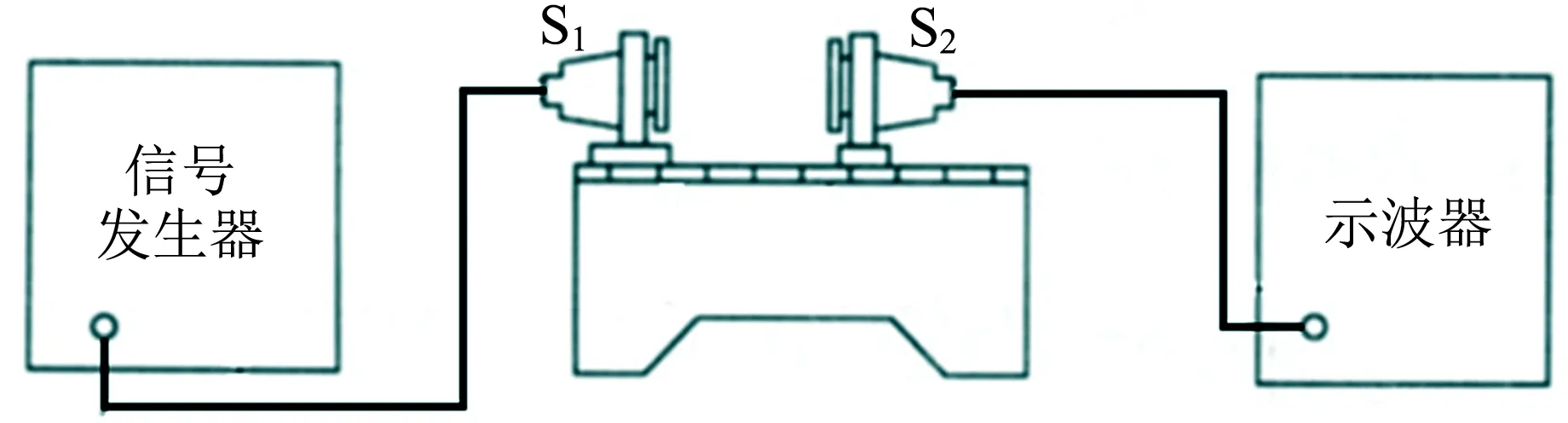
圖1 聲速測量實驗裝置圖
1 系統設計
1.1 設計原理
聲波在空氣中傳播時,聲速v與溫度T、壓強p的關系[3]為
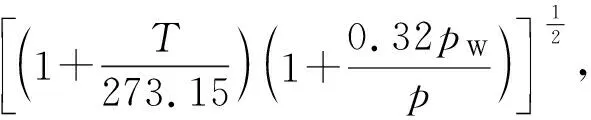
(1)
其中,pW為相對濕度與對應溫度飽和蒸氣壓[4]的乘積.
1.2 系統硬件設計
本文設計的空氣中聲速自動測量電子裝置結構原理如圖2所示. 選用低功耗STC12C5A60S2為核心處理器、高精度DHT11為數字溫/濕度傳感器[5]、BMP180為數字壓力數據采集傳感器[6]、液晶顯示器為LCD12864;采用DC5V進行供電,而系統主要使用3.3 V電源,故選用ASM1117-3.3 V進行電源轉換并提供給BMP180和DHT11元件;選用STC12C5A60S2 處理器為主控制器進行系統總體控制,選用BMP180和DHT11傳感器,在STC12C5A60S2 的控制下,傳感器內部的測量部分單元進行當前氣壓、溫度、濕度測量,測量所得到的數據經過內部ADC轉換為數字信號并加以修正,修正后的結果通過I2C數據總線和STC12C5A60S2 進行通信;然后系統軟件將所得到的壓力p、溫度T和濕度H,經式(1)計算出當前聲速值, 并將數據顯示在LCD12864液晶顯示器上.
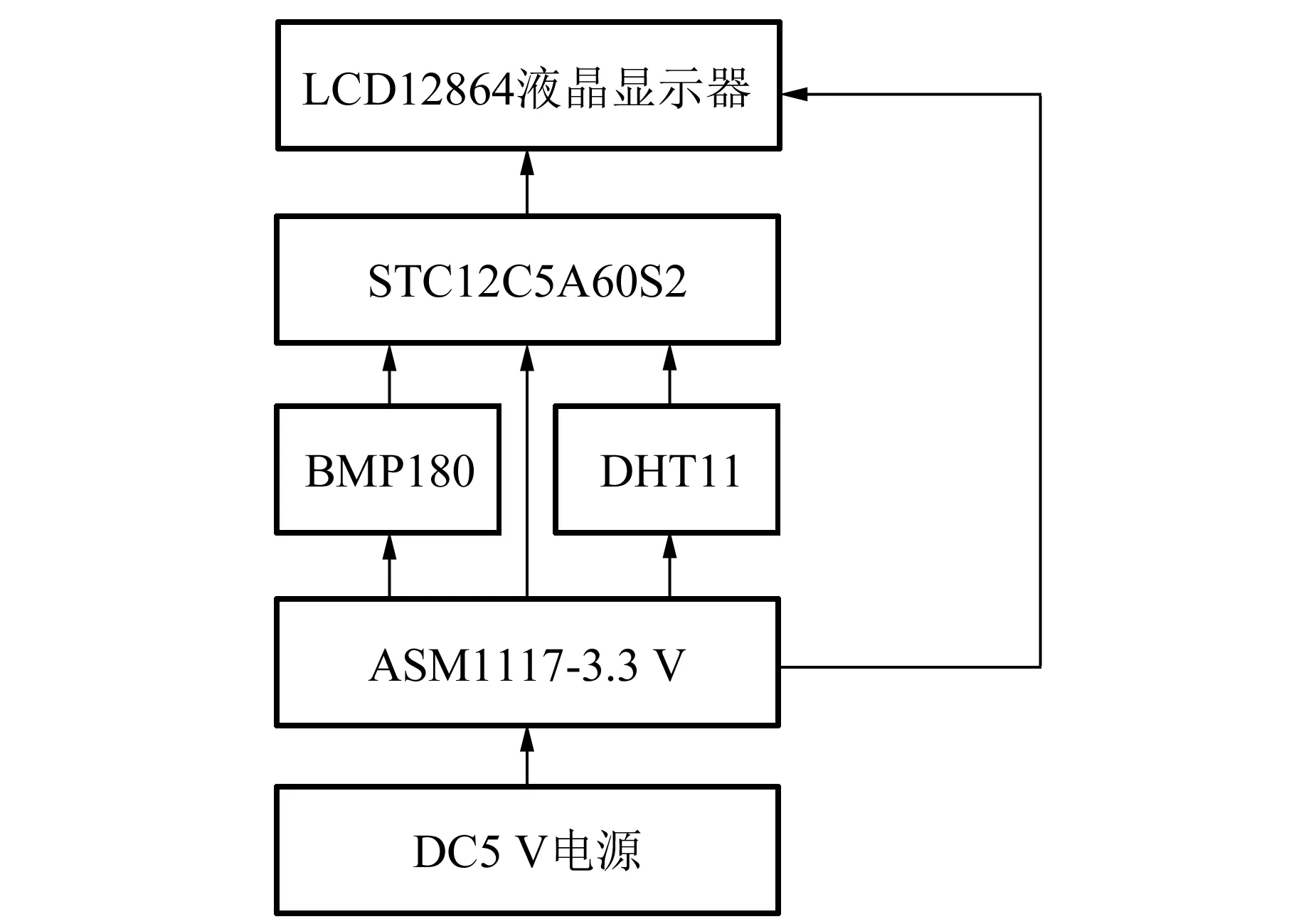
圖2 系統結構示意圖
1.2.1 供電、下載、串口模塊通信
由于需要采用DC5V或充電寶進行供電,但BMP180和DHT11的供電電壓一般為3.3 V,故需要AMS1117-3.3 V穩壓器進行電源轉換,將DC5V或充電寶電壓轉換為穩定的3.3 V電壓供給BMP180和DHT11設備. 電源轉換硬件基本原理如圖3 所示.
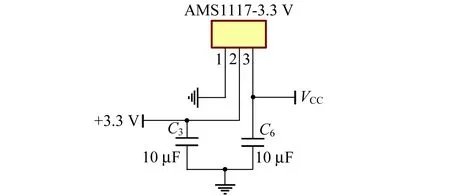
圖3 電壓轉換電路
由于軟件系統需要調試和修改程序,故預留USB串口通信接口以及和其他設備進行通信,圖4為供電、下載、串口模塊通信中采用CH340芯片做數據轉換,STC12C5A60S2 的引腳P3.1為TXD,P3.0為RXD引腳,2 個引腳分別接入CH340的2和3引腳的TXD和RXD連接即可.
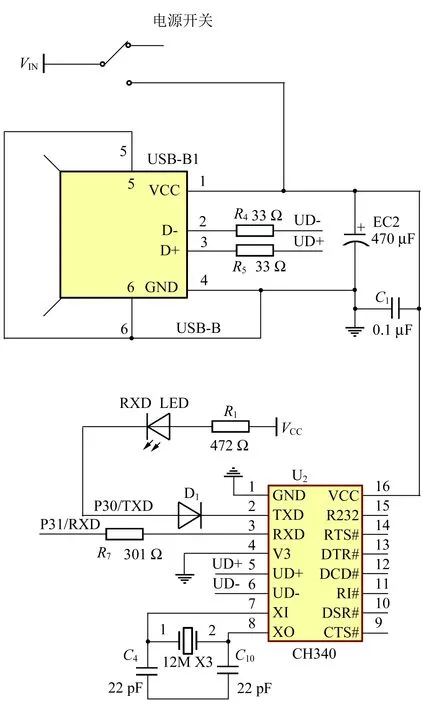
圖4 供電、下載、串口模塊通信
1.2.2 系統設計電路總圖
系統設計電路總圖如圖5所示. BMP180 壓力傳感器通過I2C總線和STC12C5A60S2 微處理器連接,其連接只需通過SCL 時鐘線和SDA數據線2 根線連接在STC12C5A60S2的2個引腳P1.0和P1.1即可,DHT11溫度/濕度傳感器通過DATA數據線連接在STC12C5A60S2的P3.2引腳; LCD12864液晶顯示器引腳DB0~DB7與STC12C5A60S2微處理器的P0.0~P0.7依次連接;LCD12864液晶顯示器引腳RST與STC12C5A60S2微處理器的引腳P2.3連接;LCD12864液晶顯示器引腳Vout連接10 kΩ滑動變阻器調節LCD12864液晶顯示器的背光,滑動端與液晶顯示器的引腳Vo連接;LCD12864液晶顯示器的引腳RS,R/W,E與STC12C5A60S2微處理器的引腳P2.4,P2.5,P2.6分別連接;實物圖如圖6所示.
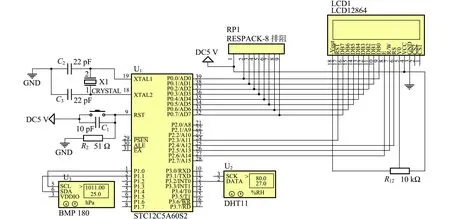
圖5 系統電路設計總圖
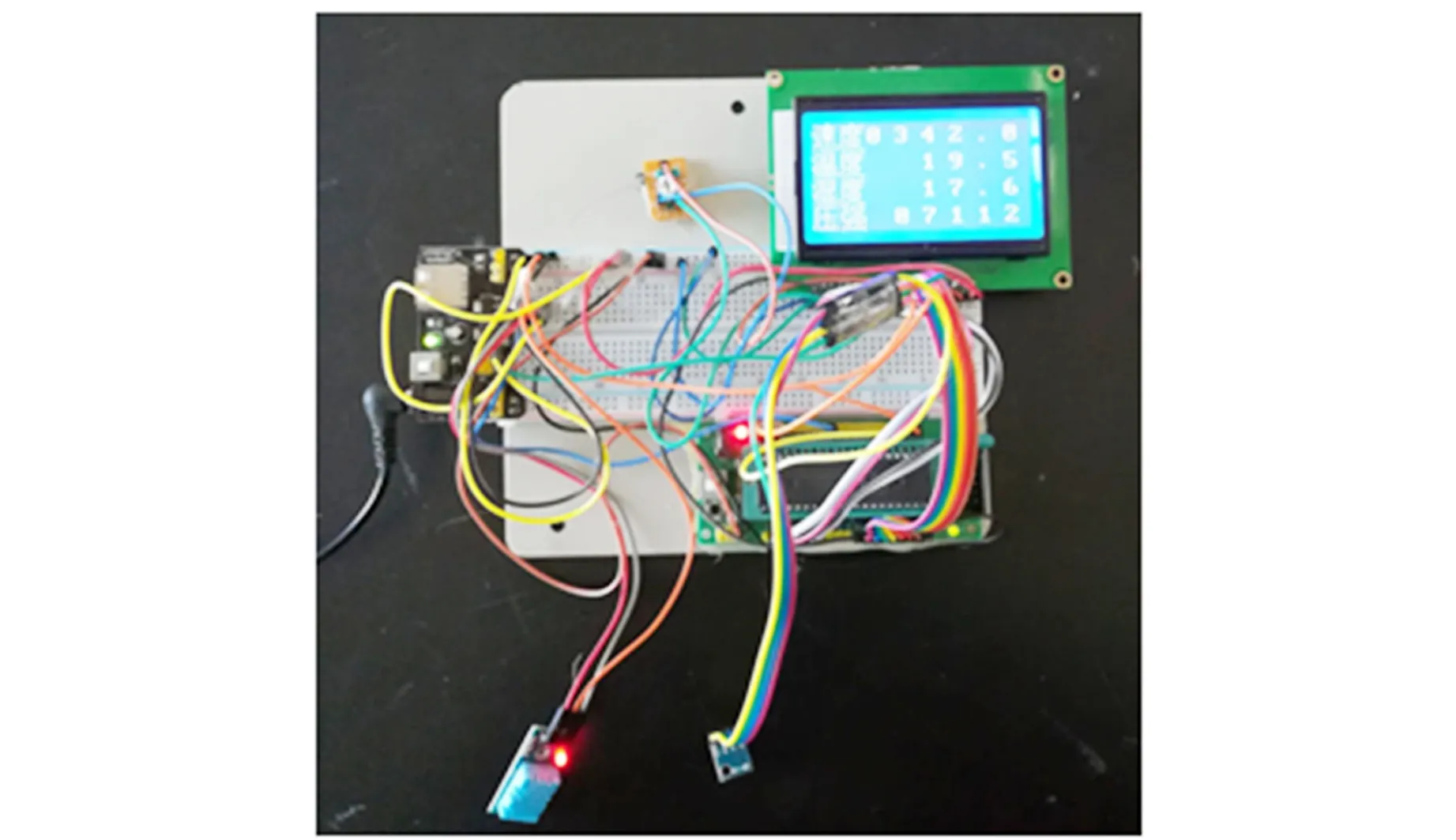
圖6 系統設計實物圖
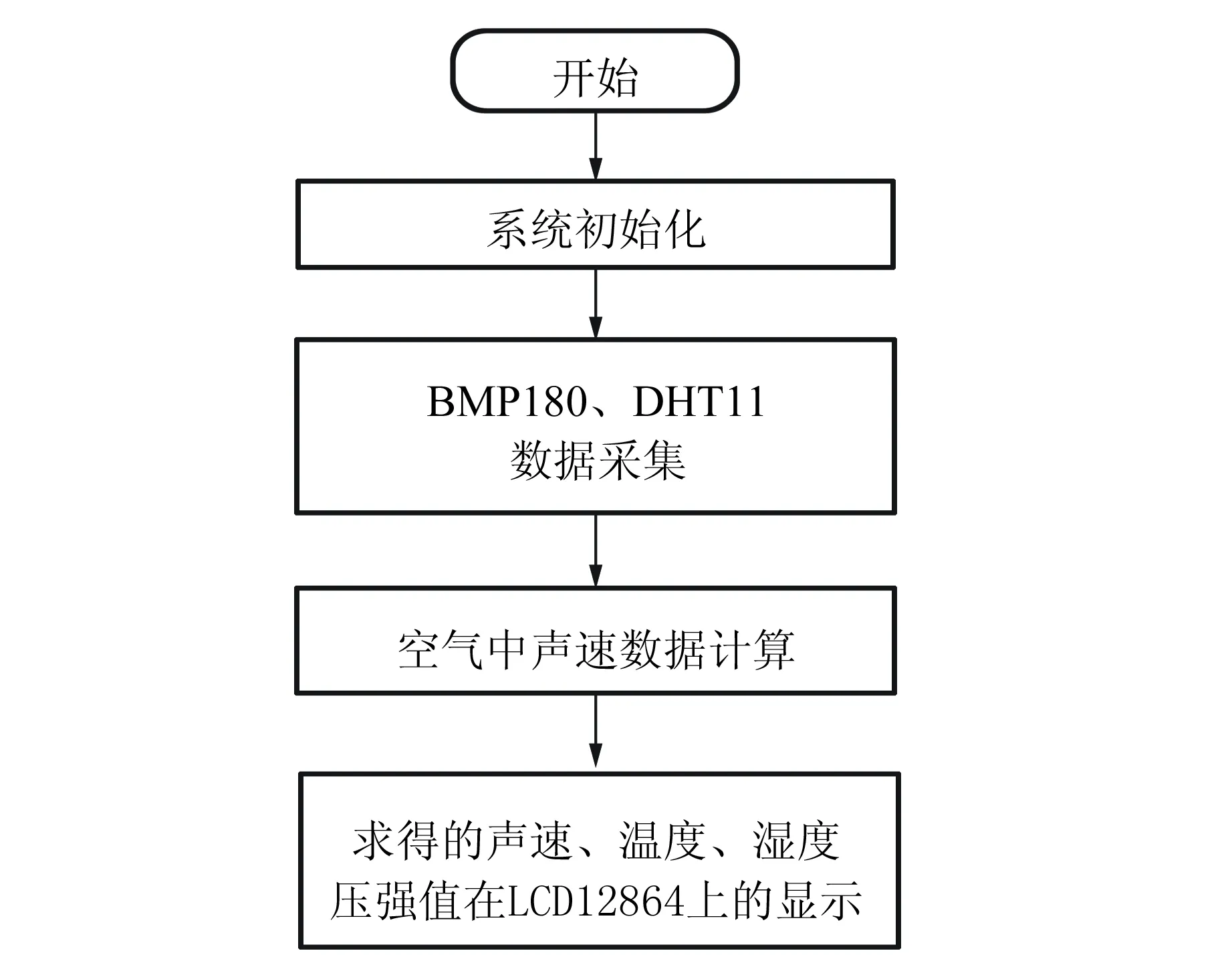
圖7 系統主要流程圖
1.3 系統軟件設計
系統主要流程如圖7所示.
軟件部分設計采用C語言編程,主要包括STC12C5A60S2主控程序部分,LCD12864液晶顯示部分,BMP180和DHT11的I2C數據通信部分、空氣中聲速值計算部分等.
2 實驗數據
2.1 使用SW-1實驗裝置測聲速
為了減少測量駐波距離時的誤差,計算中采用:
(2)
其中,x0為信號強度產生極大值初位置,xi為信號強度產生極大值末位置,n為駐波個數. 依據波速v、波長λ和頻率f之間關系
v=λf
(3)
計算聲速值見表1.
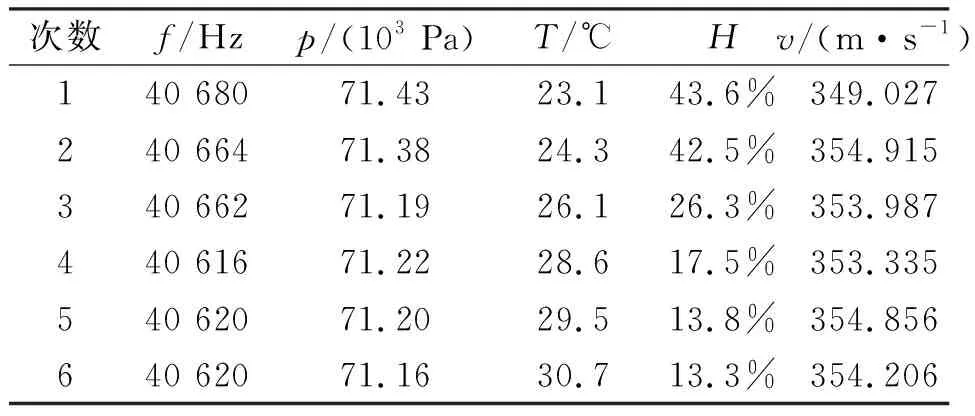
表1 駐波法測量聲速的數據
2.2 電子裝置測聲速
采用電子裝置測量聲速的測試結果見表2.
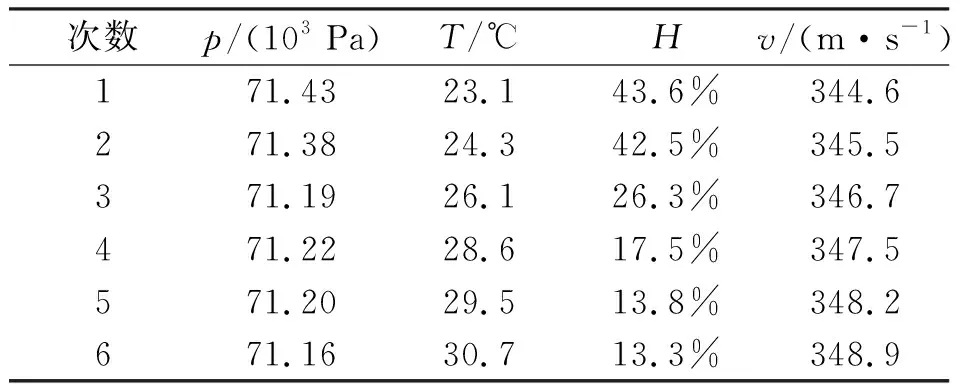
表2 用電子裝置測量聲速的數據
2.3 理論計算結果
根據式(1)計算結果見表3.
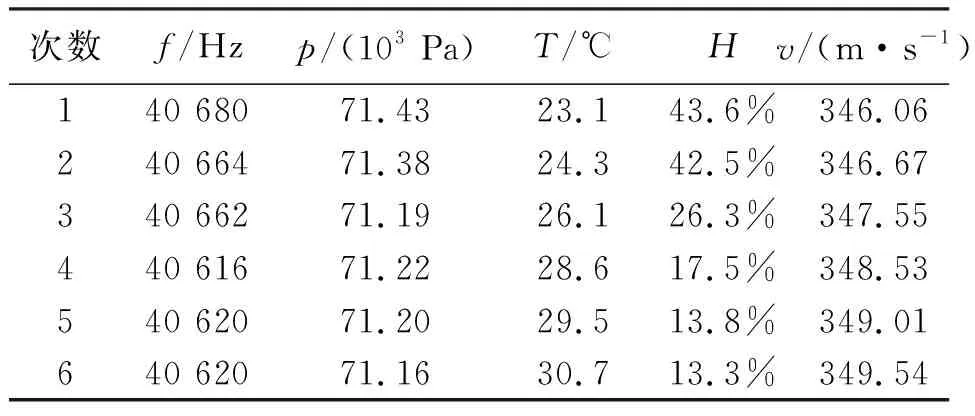
表3 由式(1)計算得到的聲速數據
2.4 數據分析
由表1~表3可計算出各測得的速度的相對偏差,具體見表4,Er1為SWL-1實驗裝置測得的聲速與理論聲速的相對偏差,Er2為電子裝置實測聲速值與理論聲速的相對偏差.
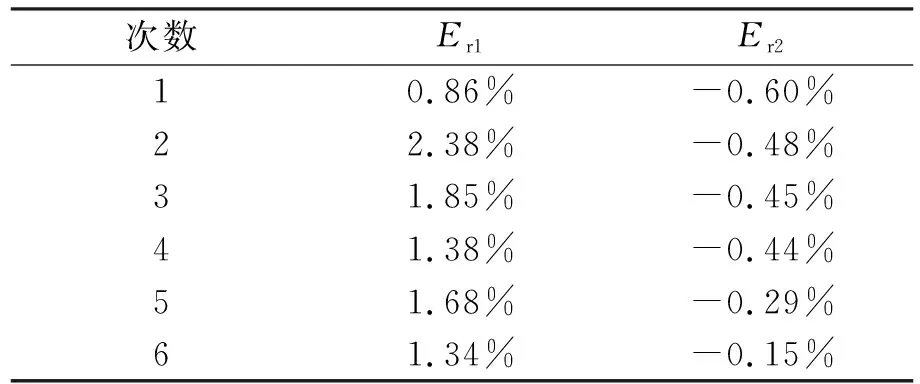
表4 相對偏差
由表4可知,本系統在實驗原理、硬件結構和軟件算法方面均采取了減小誤差的措施,由實驗數據得各組偏差均不超過1%,相比于SW-1實驗裝置實測聲速處于合理的范圍,可見本系統具有較高的準確度. 誤差來源可能包括:溫度/濕度傳感器精確度為相對濕度±5%、溫度±2 ℃,導致本電子裝置輸出結果與理論值存在偏差;信號采集和處理電路存在微小噪聲.
3 結束語
本裝置與現有的實驗室測聲速設備相比,實現了自動測量與計算,可及時測量,減少了人工干預;測量結果誤差小,準確性高;結構簡單、制作成本低、攜帶方便,可利用充電寶為其提供電源,方便在野外進行實地空氣聲速測量. 該聲速測量實驗裝置可應用在大學基礎物理實驗及課堂教學環節,在聲速測量實驗中可提供聲速值驗證其他聲速測量實驗設備所得的聲速數據的正確性,本裝置也體現了虛擬儀器的設計思想.
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
家庭影院技術(2017年9期)2017-09-26 03:41:45
發明與創新(2016年38期)2016-08-22 03:02:52