反潛直升機吊放聲納纜位穩定控制需求分析
2018-10-09 10:44:12屈也頻尹大偉
直升機技術 2018年3期
關鍵詞:設計
屈也頻, 尹大偉
(海軍研究院,上海 200436)
0 引言
反潛直升機最主要的探測手段是吊放聲納,通過絞車釋放電纜將聲納換能器——水下分機放入海水中至選定的深度,主動發射聲脈沖并接收目標回波實現對水下潛艇的探測。由于聲波在水中水平傳播的特性,吊放聲納可靠工作的前提是保持聲納水下分機基本處于垂直狀態,這樣才能完成有效探測。
早期的艦載反潛直升機依靠駕駛員人工保持聲納電纜位置的穩定,但在缺少參照物的茫茫大海很難長時間工作。1945年4月,美國海軍首次在一架XR-6直升機上安裝吊放聲納進行探潛試驗。在美海岸警衛隊海軍中校羅斯·格萊厄姆(Stewart Ross Graham)的回憶文章《狼群和周日喜劇海報》中,記錄了這次直升機探潛試驗如何借助海面漂浮的周日報紙彩頁作為參照物保持吊放聲納電纜穩定的過程,充分說明了在茫茫大海上吊放聲納纜繩自動穩定功能對反潛直升機的重要性。
隨著控制技術的發展,現代艦載反潛直升機飛行控制系統均具備聲納穩定工作模式,可自動保持機身至海面的聲納干電纜高度和位置穩定。纜高控制實際上是保持直升機懸停高度,相對而言較容易實現[1]。而纜位控制難度相對大一些。國內一些學者的研究主要側重于聲納電纜受陣風和洋流影響的穩定性仿真研究[2,3],而忽視了聲納絞車機上安裝和地板機身開孔設計對纜位控制動態范圍的約束。本文主要分析吊放聲納電纜絞車安裝設計對反潛直升機飛行控制系統聲納纜位控制穩定性的影響,在此基礎上給出絞車安裝設計原則以及對纜位控制動態范圍的基本需求。
1 飛行控制系統聲納纜位控制原理
纜位控制的一般過程為駕駛員操縱直升機進入迎風懸停模態,將相對海面速度降到0附近;聲納操作員釋放水下分機入水至設定深度;當聲納電纜在聲納井中處于受海風和洋流作用的平衡位置時,水下分機基本處于垂直狀態,此時駕駛員接通飛行控制系統,進入聲納穩定工作模式。
一旦直升機受到海風和洋流變化干擾,導致電纜偏離平衡位置時,飛控系統通過安裝在絞車電纜吊掛點處的角度傳感器獲得纜位角的變化,自動調整和控制直升機姿態和運動,使電纜回到平衡位置。
以某型艦載直升機為例,其飛行控制系統聲納纜位控制分為俯仰控制和傾斜控制兩個通道。
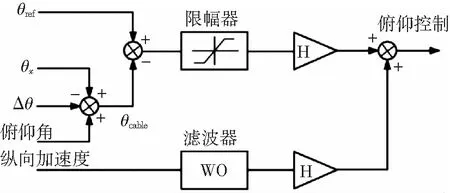
圖1 俯仰通道縱向纜位控制
在傾斜控制通道,綜合橫向纜位ψy、直升機傾斜角、絞車安裝角Δψ和橫向纜位零位,以及橫向加速度等因素,輸出傾斜和積分信號控制直升機橫滾運動來調節橫向纜位(見圖2)。
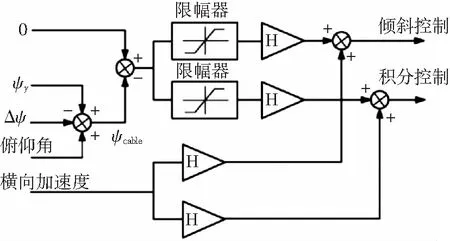
圖2 傾斜通道橫向纜位控制
2 纜位控制需求和約束分析
2.1 纜位控制動態范圍需求
飛行控制系統在俯仰控制通道上,保持θcable=θref,在傾斜控制通道上,保持ψcable=0。其中θcable、ψcable為電纜實際位置,θref為直升機逆風懸停時電纜受恒定風速影響后的平衡位置。
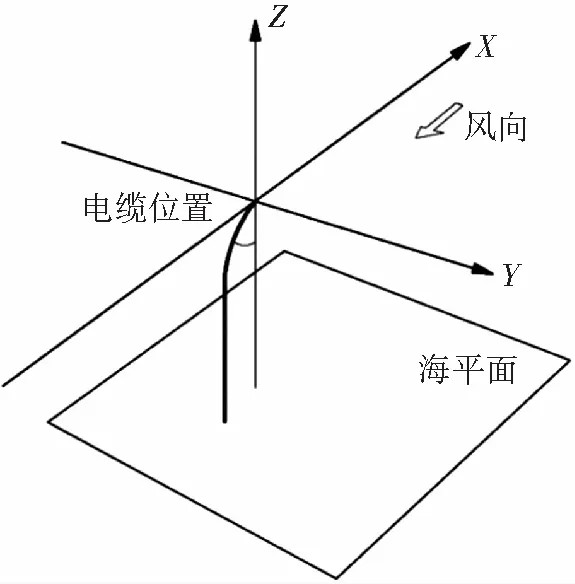
圖3 直升機逆風懸停時電纜位置
為提高纜位控制的魯棒性,并減少飛行控制系統控制規律設計的復雜性,通常要求纜位角有更大的動態范圍。
對于大多數安裝在直升機艙內的聲納絞車而言,滿足較大纜位角動態范圍需求,意味著要在直升機機身地板開一個較大的聲納井。但機身地板開孔尺寸受結構強度、機上設備安裝空間及油箱位置和大小等多種因素約束。特別是直升機受陣風影響產生姿態變化時,若聲納井開孔尺寸過小,將導致纜位穩定過程中電纜頻繁碰壁,從而造成聲納無法穩定探測。
在圖4中給出了電纜在聲納井中的運動范圍和相對關系。
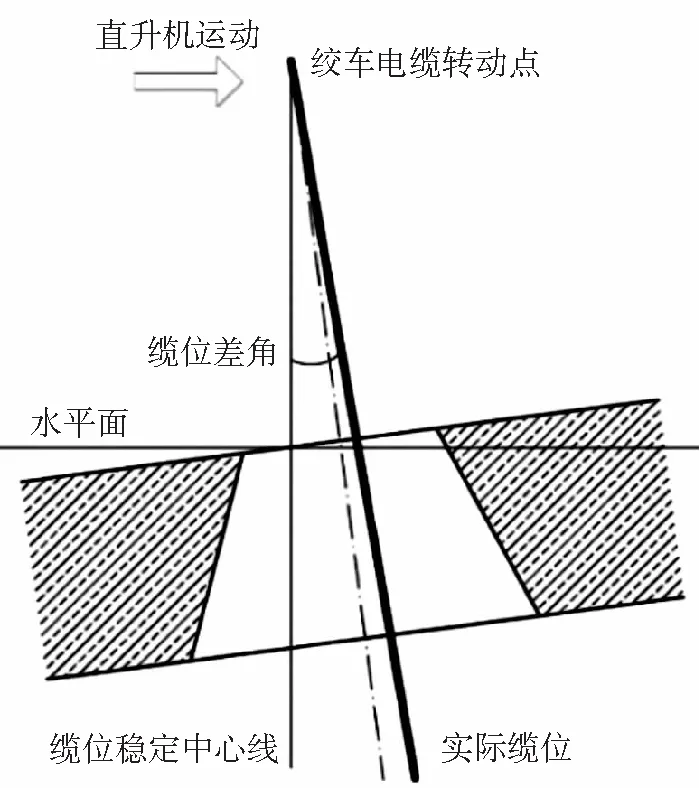
圖4 聲納井中電纜運動范圍和相對關系
由于飛行控制系統以電纜平衡位置為穩定控制基準,當絞車安裝位置設計不合適時,直升機懸停狀態下纜位平衡位置將偏離聲納井中心,纜位控制動態范圍將出現嚴重不對稱情況,直接影響纜位控制的穩定性。
一旦出現較大擾動使電纜觸碰聲納井壁的情況(如圖5所示),纜位穩定中心線進入聲納井口外的機身地板內。此時飛行控制系統控制直升機運動,試圖將電纜與機身地板內的穩定中心線重合,但因電纜被聲納井壁限位,夾角無法消除,結果將導致直升機拖曳電纜直至水下分機傾斜而無法正常工作。
隨著當前國內居民用電量的增大,生產力的發展和人民生活質量水平的不斷增強,也為我國電力行業的未來發展提供便利的條件。當前國內對用電需求量的提升也使得電力系統擴大電網的覆蓋面積。處于這種時代背景下的電力系統,相關從業人員就要不斷增強其運行的安全性、穩定性和有效性,進而才可以不斷滿足當前電力系統的信息化發展要求。在本質上來看我國經濟體系發展,人民日常生活和電力能源產生直接聯系,因此相關領域人員要有效掌控電力系統運行的穩定性和安全性,滿足人民對于電能日益增長的使用需求。除此之外,電氣自動化系統中對于信息化技術的大力應用也可以對電力系統運行期間的故障問題進行有效判斷。
因此,聲納絞車機上安裝設計合理,是確保反潛直升機飛行控制系統聲納纜位穩定性的重要前提。
2.2 聲納電纜絞車安裝對纜位的約束分析
以聲納絞車在某型反潛直升機上的安裝設計為例,幾何關系如圖6所示。
設聲納電纜轉動中心高度為H,直升機機身地板厚度為h,機身底部最大開口縱向尺寸為Dmax,則容易得到最大纜位角θmax,如公式(1)。
(1)
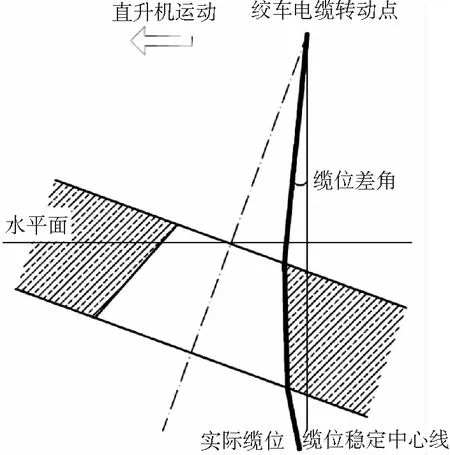
圖5 直升機拖曳聲納電纜狀態示意圖
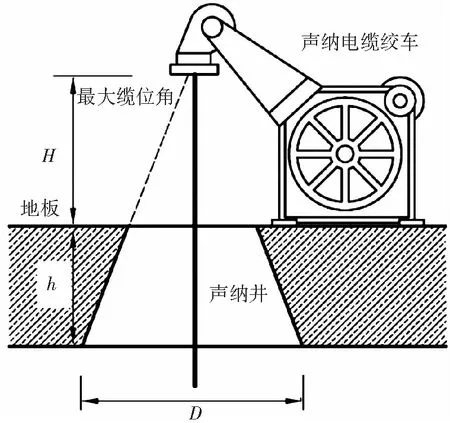
圖6 絞車安裝與纜位角靜態關系圖
顯然,纜位角的變化范圍主要由機身底部開口尺寸和電纜轉動中心高度決定。增大聲納井下口尺寸,降低絞車頭部可增大纜位角控制范圍。
實際上,由于聲納井開口受機身結構和空間限制,國外許多反潛直升機聲納絞車都是盡量降低電纜轉動中心高度,在一些大中型直升機上甚至將絞車頭部傾斜一定角度后,直接安裝在機身地板聲納井開口上。
3 纜位控制動態范圍設計與飛行驗證
3.1 纜位控制動態范圍設計
前面分析了纜位控制需求和靜態條件下的絞車設計約束。在聲納絞車安裝設計中還需考慮直升機懸停時的姿態影響。
根據直升機的飛行原理,在飛行控制系統保持懸停狀態時,直升機機身地板始終存在有一定的抬頭和傾斜角。以某型反潛直升機為例,懸停時始終存在約2°~3°的抬頭和1°~2°的右傾,加上姿態陀螺有-2°的安裝角,實際懸停時地板右傾有3°~4°。如果按照聲納絞車與機身地板水平安裝設計并使電纜通過聲納井中心,則直升機懸停時電纜將明顯偏離聲納井投影中心,縮小纜位控制的動態范圍。
為增加懸停穩定性和有利于纜位穩定控制,應在安裝設計時調整絞車的前后左右位置,或增加角度調整墊塊,使典型恒定風速下的電纜平衡位置處于聲納井的投影中心附近。
綜合以上因素進行聲納絞車安裝設計,可以擴大纜位控制動態范圍,提高飛行控制系統的聲納纜位穩定性和系統魯棒性。
當然,在不同恒定風速下可以通過纜位偏移校正調整電纜平衡位置,但合理安裝聲納絞車位置可以減少空中偏移校正操作,盡量避免聲納員通過纜位偏移校正直接操縱直升機運動。
3.2 纜位穩定飛行驗證
在某型反潛直升機上完成吊放聲納纜位控制范圍設計后,進行了飛行試驗驗證。
圖7-圖12給出了兩次在不同海域進行反潛直升機聲納探測飛行試驗的結果,包括飛行控制系統聲納纜位穩定狀態的縱向、橫向纜位曲線和纜位動態軌跡圖,以及直升機的姿態變化曲線。
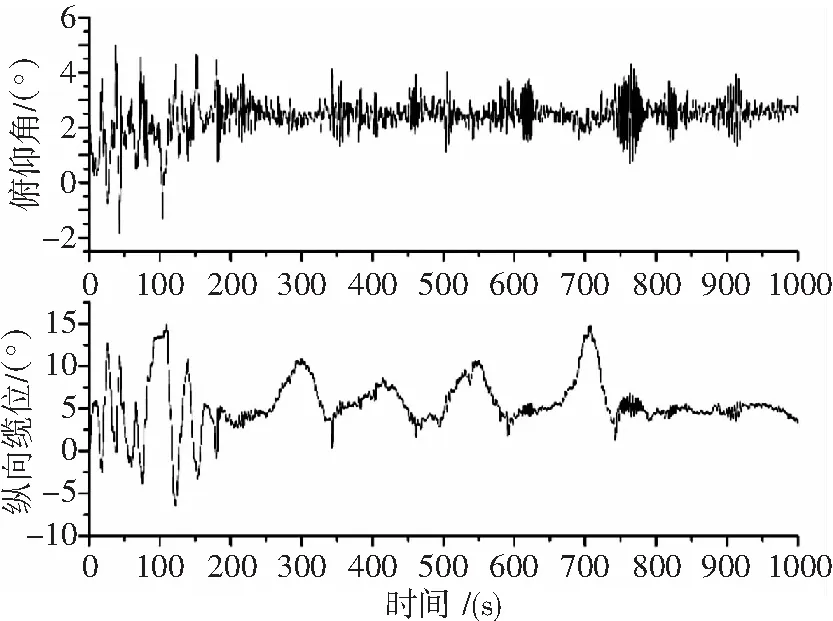
圖7 第一次試飛中縱向纜位穩定與直升機姿態曲線
從圖中可以看出:
1)圖7、圖8曲線表明,在第一次試飛中,約150s后接通飛行控制系統聲納工作模式,由人工操作直升機懸停進入到聲納纜位自動保持狀態;圖9、圖10曲線表明,在第二次試飛中,約260s后接通飛行控制系統聲納工作模式,由人工操作直升機懸停進入到聲納纜位自動保持狀態。
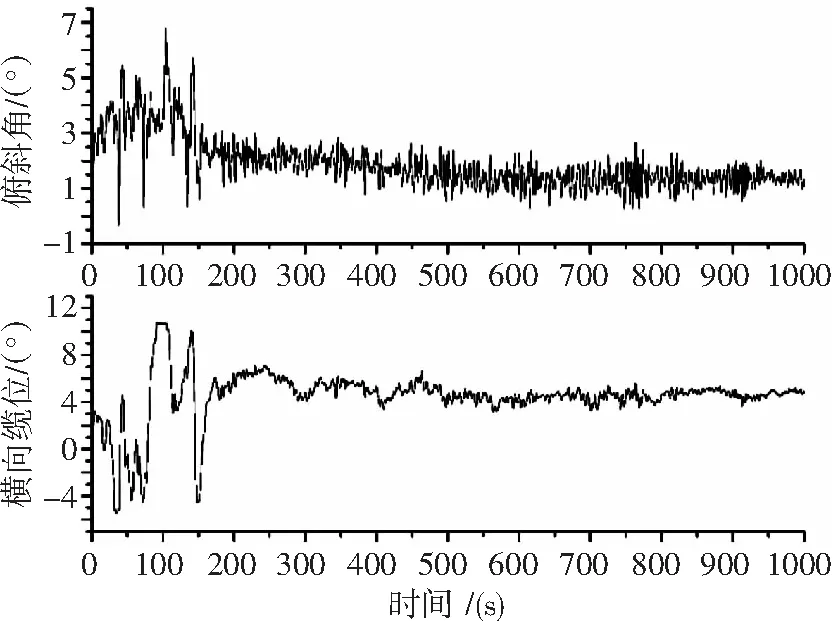
圖8 第一次試飛中橫向纜位穩定與直升機姿態曲線
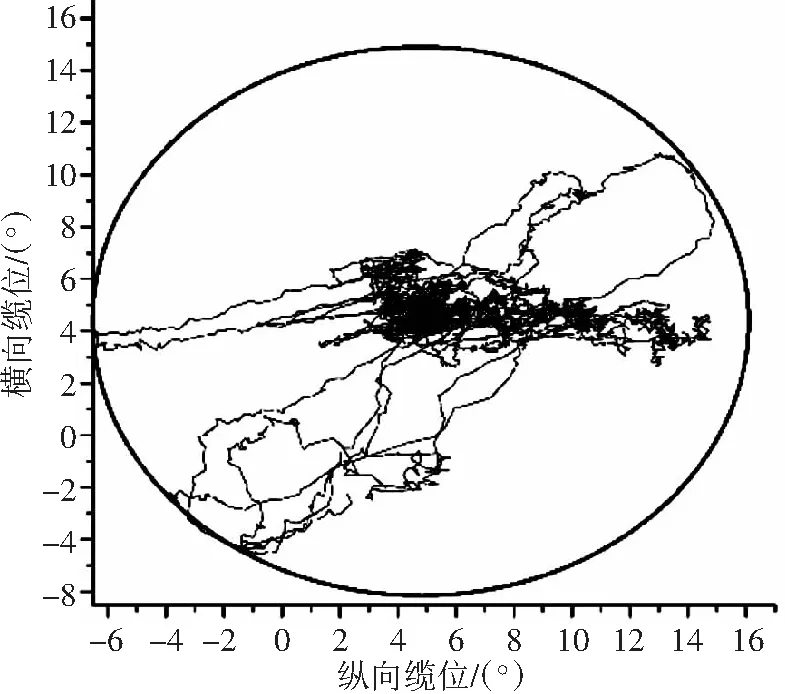
圖9 第一次試飛中聲納井投影面中的纜位軌跡曲線
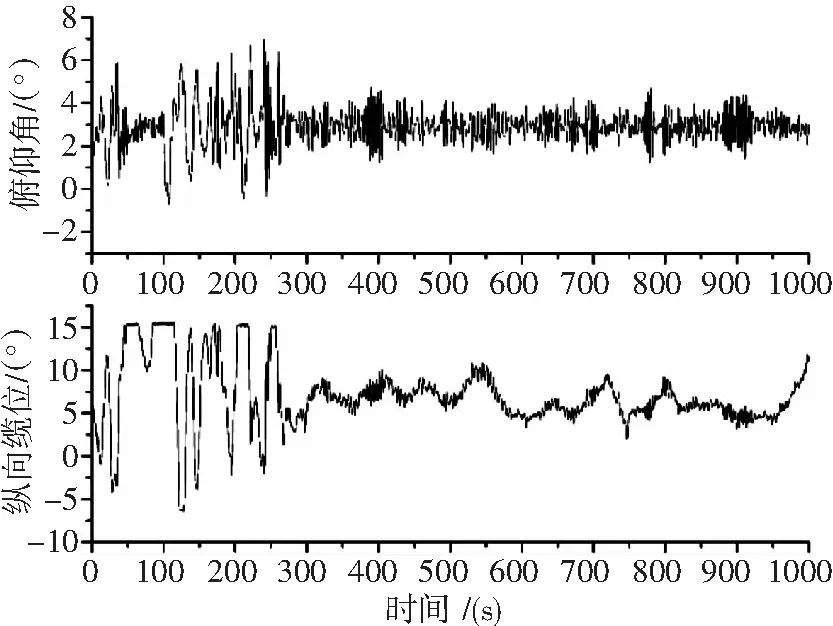
圖10 第二次試飛中縱向纜位穩定與直升機姿態曲線
2)在接通聲納工作模式之前,直升機由人工保持逆風懸停,此時姿態變化較大,電纜在聲納井中大幅度擺動。一旦進入聲納纜位自動保持狀態,直升機姿態穩定,俯仰角變化基本保持在±2°,傾斜角變化基本上在±1°。電纜明顯處于受控狀態,其中縱向纜位控制受風速變化影響較大,橫向纜位受擾動影響相對較小。
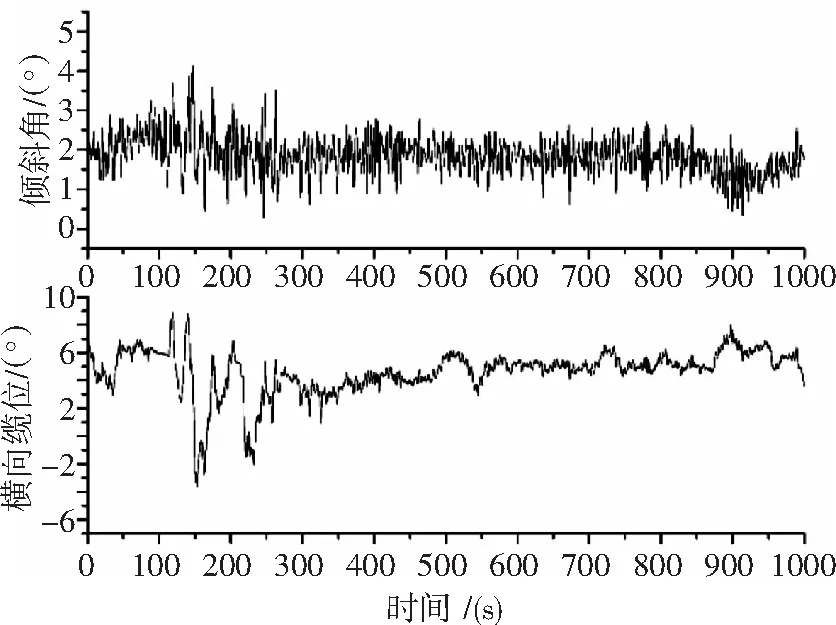
圖11 第二次試飛中橫向纜位穩定與直升機姿態曲線
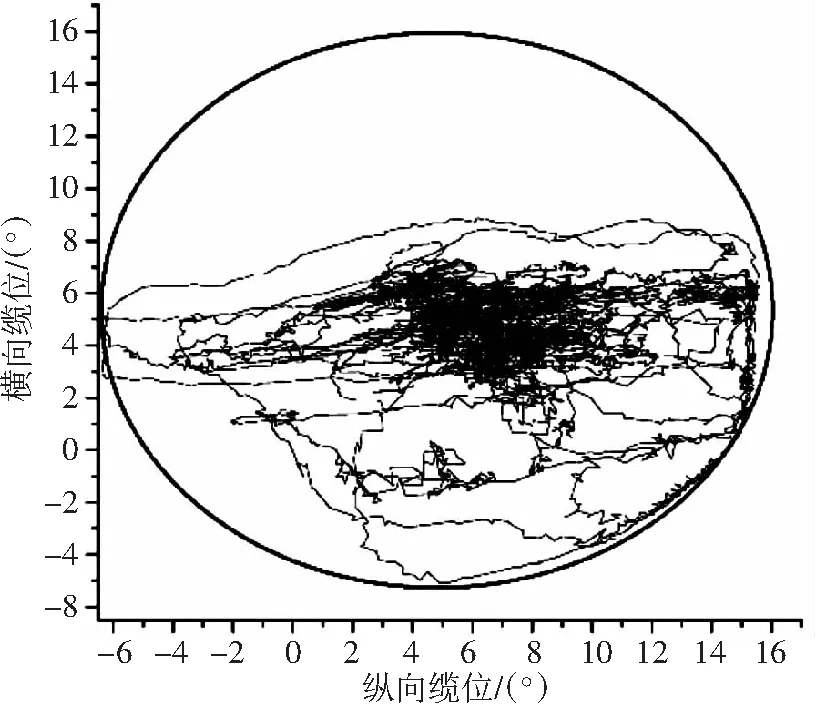
圖12 第二次試飛中聲納井投影面中纜位軌跡曲線
3)受陣風和不同海域洋流影響,每次懸停時的纜位穩定中心圍繞聲納井投影中心稍有變化,纜位控制精度約為縱向±5°、橫向±3°,實際穩定控制范圍基本上是一個橢圓形區域。
4)在第一次試飛中有4次偏移到聲納井前沿并回到穩定中心附近的運動,最大偏移量約為10°。綜合試飛海域存在較大洋流,以及現場觀察到直升機相對海上固定基準存在后側向運動等情況分析,這是在纜位穩定過程中水下分機受洋流影響漂離中心后,直升機通過后向運動調整纜位的正常結果。
4 主要結論
顯然,吊放聲納電纜絞車安裝和聲納井設計直接決定了纜位控制的動態范圍,對聲納纜位穩定性有著重要的影響。設計中應把握以下原則:
1)絞車安裝設計中必須考慮直升機實際懸停時機身地板的水平姿態角,使纜位中心處于聲納井投影面的中心,避免產生電纜碰壁造成拖曳聲納水下分機的現象。
2)應盡量降低電纜轉動中心點高度,在減小聲納井設計尺寸,不過多占用機身空間的情況下,擴大纜位動態范圍。
3)必須充分考慮陣風和洋流的影響,為飛行控制系統至少提供不少于纜位控制精度3倍的動態范圍,以提高系統的魯棒性。從飛行控制系統實際控制精度和抗陣風干擾能力看,在絞車安裝和聲納井設計時,應提供不少于縱向±15°、橫向±9°的纜位動態控制范圍。
5 結束語
反潛直升機吊放聲納纜位穩定控制設計,不僅僅是飛控系統纜位穩定模態設計問題,絞車機上安裝位置、角度,大范圍的纜位角控制需求,以及電纜的防碰壁設計等指標均是制約聲納纜位穩定性控制效果的重要因素,需在系統設計時綜合考慮。
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04