歐洲互聯智能汽車關鍵技術綜述—12thITS EUROPEAN CONGRESS總結
2018-10-10 06:41:56
汽車文摘 2018年10期
1 前言
在物聯網(IoT)發展的大背景下,智能交通是各國智慧城市發展中的重要發展戰略。2017年在法國斯特拉斯堡舉行的12屆歐洲智能交通大會上,各國專家討論了互聯網和物聯網下信息和通訊技術(ICT)、汽車互聯化與汽車自動化、汽車智能化的關鍵技術、數據安全與數據隱私,討論了隨著數字化和互聯化的發展,互聯智能汽車面臨的挑戰,提出了應對挑戰的技術措施。
2 互聯智能汽車測試能力整合
當前互聯智能駕駛(Connected and Automated Driving,CAD)技術發展面臨著法律、互聯技術、測試與認證技術、傳感器和感知技術、功能與控制、道路和基礎設施適應和人機界面技術(HMI)發展的挑戰。
關于測試技術,普遍采用V字型流程,即從顧客需求開始到最后的用戶驗收試驗,其中要不斷進行驗證和確認的迭代過程(圖1)。
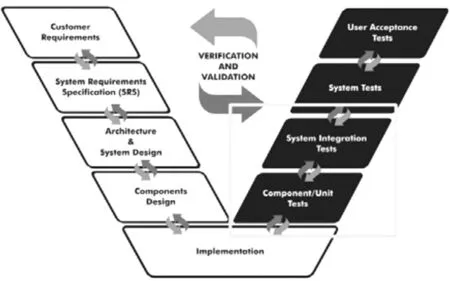
圖1 V字型驗證與認證流程[1]
歐盟互聯智能汽車的測試采用的是合作制,形成了試驗、示范基地聯盟,其中歐盟試驗基地(DRIVE 2X)包括,法蘭克福基地Sim TD,Autobrennero,Sisco?ga,SCORE-F,Helmond的System TS,Gothenburg的Test Site Sweden,Coop TS Finland。
COMPASS 4D聯盟包括在英國的Newcastle、瑞典的Copenhagen、荷蘭的Helmond、法國的 Bordeaux、Vi?go、意大利的Verona和Thessaloniki七大城市,Com?pass4D通過在七個歐洲城市實施和試行三項合作ITS(C-ITS)服務,實現公路運輸的道路安全和能源效率。
歐盟支持的CO-GISTICS聯盟進行車聯網交通效率、燃油經濟性改善方面的示范運行,主要在物流中心進行示范項目,這些物流中心包括Frankfurt、Bordeaux、Vigo、Thessaloniki、Arad、Trieste和 Bilbao物流中心。
此外歐盟還支持SCOOP項目和C-ROADS項目,其中SCOOP是一個合作ITS試點部署項目,旨在將大約3000輛車與2000 km的道路連接起來。它由5個不同類型的道路組成:Ile-de-France、巴黎和...之間的“East Corridor”。而通過C-Roads平臺,政府和道路運營商聯合起來協調整個歐洲的合作智能交通系統(CITS)的部署活動,目標是為道路使用者實現可互操作的跨境C-ITS服務的部署。
L3Pilot項目是由歐盟理事會支持的汽車研發Ho?rizon 2020項目支持的項目,該項目聚焦大規模SAE Level 3自動駕駛功能測試,并額外測試一部分Level 4的功能。目前該項目有1000多個測試駕駛員,100輛車分布在11個歐盟國家,測試智能駕駛技術在安全和高效交通方面的可行性。
AutoPilot聯合項目:在西班牙的Vigo進行城市駕駛、自動代客泊車測試,在法國的Versailles,進行自動代客泊車、城市駕駛和編隊行駛,在荷蘭的Brainport進行自動代客泊車測試,高速路自動駕駛和編隊測試,在芬蘭的Tampere進行自動代客泊車和城市自動駕駛,在韓國進行城市駕駛,在意大利的Livorno進行城市駕駛和高速路自動駕駛。
Drive Me項目,在瑞典Gothenburg公共道路上100個正常家庭將體驗Volvo XC90s自動駕駛。該項目是2013年啟動的,2017年開始示范實施,在英國倫敦和中國北京也將實施類似的項目。
由CTAG管理的SISCOGA智能走廊與DGT和城市區域合作,與Vigo合作,在城市道路上集成了100多公里。這個在歐洲開創的永久性走廊的目標是對汽車到汽車和汽車到基礎設施的通信系統進行運行測試。
CONCORDA EATA項目,該項目第1階段(2017-2021):
●使用案例主要聚焦提供服務,包括高速路代駕(L2/L3)和密集的卡車編隊行駛。
●在技術方面主要是:
·預開發:混合通訊:LTE,ITS G5+LTE V,移動邊緣計算應用
網絡切片;
LTE廣播:GNSS偏移,有害信息和高清地圖更新
·研究項目:商用模式、責任、安全概念、服務質量、安全和數據保護法規和標準
●在德國、法國、荷蘭、西班牙和比利時20.4Km的測試車道。
CONCORDA EATA項目,該項目第2階段(2018-2022):
使用案例在第1步的基礎上加入代客泊車,在技術應用方面全面應用第1階段的成果,形成跨境的公路網。
CONCORDA EATA項目,該項目第3階段(2019初-2023):
使用案例增加智能駕駛,開發的成熟技術開始進行工業化,在授權的路網上進行商業化的智能駕駛。
SISCOGA智能走廊的主要技術參數:
●ITS智能走廊130 Km;
●ITS G5:80 RSUs(路邊單元);
●Cellular:3G/4G和LTE/V2X,5G;
●與葡頭牙的ITS智能走廊互聯。
SISCOGA還建立了合作FOT和示范項目,2010-2011年進行了C2ECOM研發,2011-2012進行了實際道路試驗研究項目(FOT)、2012-2013年進行DRIVEC2X FOT,2013-2015年完成了COMPASS4D示范項目,2016-2017年完成了Project SCOOP智能走廊的部署工作。
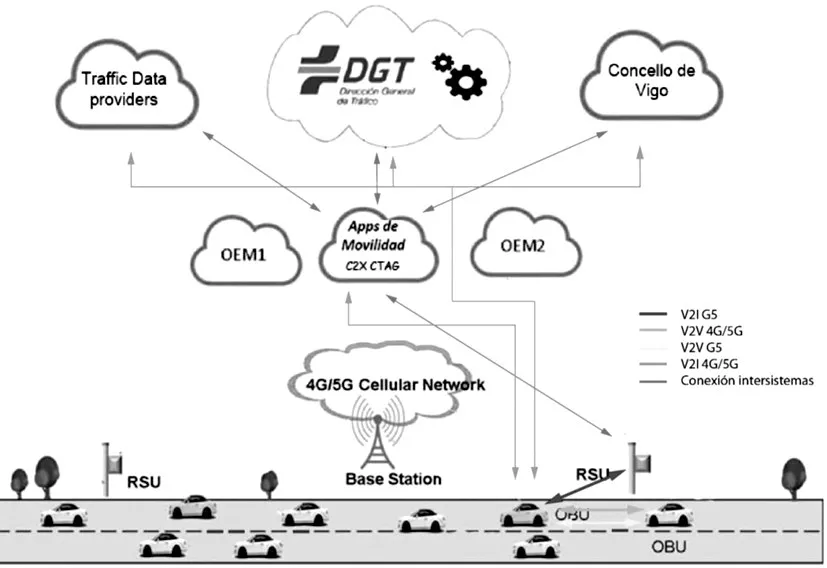
圖2 SISCOGA測試項目的混合通訊構架[1]
SISCOGA測試項目的混合通訊構架見圖2,主要由DGT云、Concello de Vigo云、交通數據提供商的云、OEM云和作為基站的4G/5G蜂窩網絡組成,路邊單元為RSU,車載單元為OBU組成了車聯網,其中Apps de Movilidad作為核心與RSU、DGT和交通數據提供商云和Concello de Vigo云保持數據交換。
試驗樣車認證
試驗樣車的申請人必須提供符合要求系統認證證書(由一系列的技術要求組成)。授權的認證程序是快速和靈活的,并且這種認證在不同的歐盟成員國是互認的,未來的認證將實施軟件認證。
3 互聯技術促進智能汽車發展
歐盟支持成立了EATA通訊聯盟,主要目標[2]:
●促進歐盟互聯智能駕駛技術的發展;
●清除發展道路上潛在的障礙,聚焦急需的技術和法規措施;
●識別促進互聯和智能駕駛技術的商用模式;
●使歐盟在互聯智能駕駛技術領域在全球處于領先地位;
●在汽車行業和通訊行業之間搭建一個知識共享的平臺,開發“共同的語音”;
●改善道路安全和提升交通效率,造福社會;
●促進歐盟的數字化經濟。
EATA互聯智能汽車關注L3,L4的高速路代駕,高密度的卡車編隊和自動待客泊車三項工作。
Luc JANSSEUNE提出了智能駕駛的新挑戰:車載傳感器和互聯數據[2]。
●作為額外的車輛傳感器互聯數據:
●新的信息并且賦予新的屬性;
●安全相關的應用需要通過混合通訊的通道進行監管;
●在數據框架上采用安全規則;
●更精、確更安全的定位:校正GNSS
Concorda系統介紹(圖3)
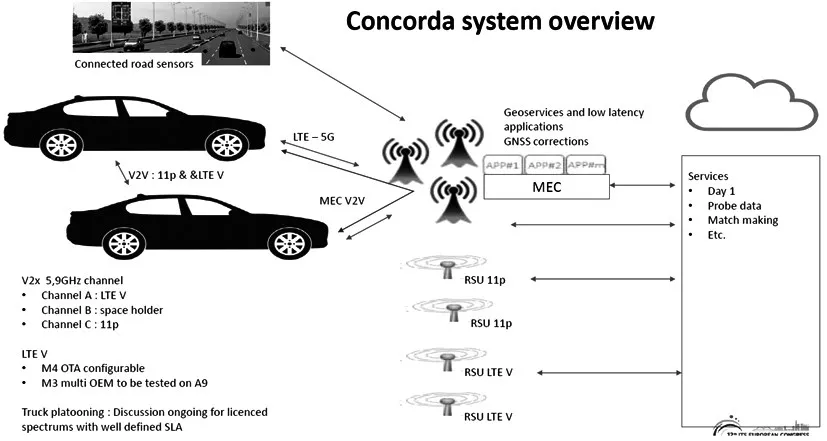
圖3 Concorda系統圖[2]
GNSS校正因素廣播
目標[2]:增加GNSS定位精確性
●衛星狀態空間代表;
●廣播范圍20-70 Km;
●廣播頻率=1 sec
●包括MNO范圍
移動邊緣計算(MEC)作為協同接受消息(CAM)和非中心化環境通知信息(DENM)備用
提高短程通信可靠性/可用性的措施[2]:
●消息重復:(已經到位)
●冗余通信路徑:
●例如2個95%的可用性總共為99.75%
●LTE站天線位置高,因此可以更好地到達。
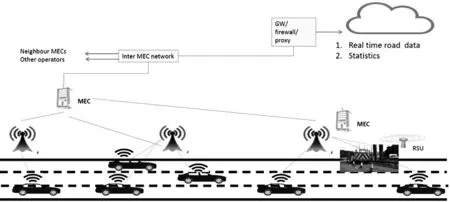
圖4 MEC系統構架[2]
代客泊車(AVP)方案[2]
●與基礎設施的冗余通信:
●冗余技術:
●基礎設施將連接到互聯網,通過AVP由汽車通過LTE備份通過短距離通信和嵌入式用戶權限管理進行控制(見圖5)

圖5 AVP與代客泊車管理[2]
通訊片段:
●NB用于汽車喚醒和電池驅動的停車傳感器
●uRLLC用于MEC應用和遠程駕駛
MAP和精準定位:
●高精3D相對位置地圖優化
●GNSS校正位置
●基于停車傳感器的精準定位
泊車通訊:
●通過datex II
代客泊車(Automated Valet Parking-AVP)實時模型見圖6,服務內容如下:
●車輛Check in/out;
●通過智能手機APP與用戶界面;
●給進入的車輛發生3D高精停車地圖;
●整合數據:基于群體的停車場檢測(使用汽車傳感器),登記離開汽車,歷史模式,P-slot傳感器和相機;
●屬性放置并將路徑發送到屬性位置;
●管理額外的服務:洗車、加油、in-car-delivery,EV充電等;
●通過無線連接管理停車場訪問權限,并通過汽車中的令牌作為離線備份來管理;
●交通管理:例如緩沖區的自動駕駛汽車優先考慮手動汽車行駛;
●事故管理+安全(避撞,如行人避撞)。
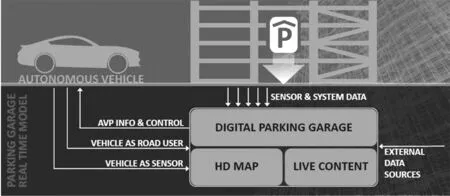
圖6 AVP實時模型[2]
4 智能駕駛車載核心技術
德國博世公司描繪了3個智能駕駛場景,即高速路自動駕駛(2020年)、自動泊車(2018)和城市自動駕駛(2020以后)。
作為顛覆式技術的全球智能駕駛技術的經歷著快速的演變,目前駕駛輔助技術系統已經成熟,已經匹配了批量生產產品,大規模、安全和低成本的技術增長促進自動駕駛成為可能,同時又不失駕駛樂趣。隨著機電一體化技術的發展,智能駕駛技術會在內燃機和電驅動共存的基礎上快速發展,這得益于不斷改進的先進汽車電子技術和大批量應用。
互聯技術、移動出行、移動數據、加速性、可獲得性、可維修性和互操作性等是共享汽車商業發展的獨特賣點,而IT和軟件是其核心競爭力,未來電驅動和高端CE和模塊化是智能共享汽車(SAEC)的動力總成和電子發展的競爭焦點。
Dr.Eckard Steiger提出智能駕駛的核心活動和核心技術包括感知、思考和行動。AI車載計算機的概念見圖7,博世公司與NVIDIA公司合作,采用了NVIDIA公司的Xavier技術,打造了車載計算機,結合車載傳感器的大量環境數據和云數據和占用網格,汽車變得越來越聰明。通過AI深度學習,汽車可以檢測了解周圍環境、可以按感知繪制局部地圖,可以規劃沿著繪制的路徑駕駛、可以根據當前車輛駕駛狀態優化駕駛動態特性。
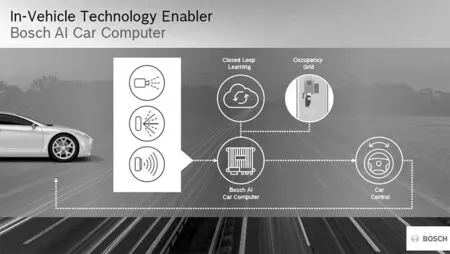
圖7 車載計算機[3]
智能駕駛的另一核心技術是精準定位,博世公司提出了博世道路簽名云的精準地圖概念(圖8)。博世道路簽名系統與高精地圖集成,通過OEM云、地圖合作伙伴云、博世道路簽名云,視頻道路簽名數據與雷達道路簽名數據共同在博世道路簽名云進行匹配來進行精準定位。
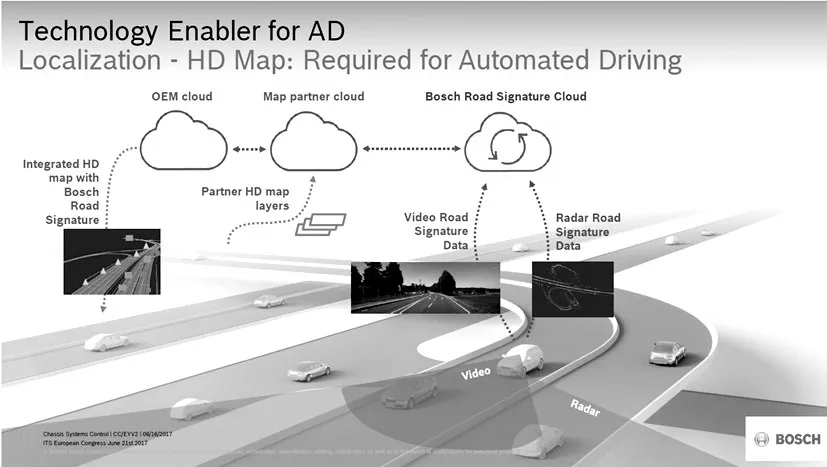
圖8 道路簽名系統與精準定位[3]
互聯技術認證
博世公司提出了汽車互聯技術認證流程,包括事件觸發、記錄事件、上傳事件、在Bosch IoT云數據庫上匯總雷達、視頻數據,然后進行數據分析,Bosch IoT云由數據分析人員、車隊管理人員和基礎設施開發人員管理。通過使用事件觸發數據記錄降低數據復雜性,由于即時數據分析而導致的開發迭代時間很短(圖9)。
Francisco Sanchez在12屆歐洲智能交通大會上介紹了SISCOGA 4CAD未來實施計劃、Autopilot、CMOBILE、C-ROADS項目(西班牙)[4]。
Project SCOOP:2016.1-2018年
功能:選擇Day 1協同服務;
車隊:10臺互聯智能汽車;
地點:SISCOGA4CAD城間和葡頭牙智能走廊
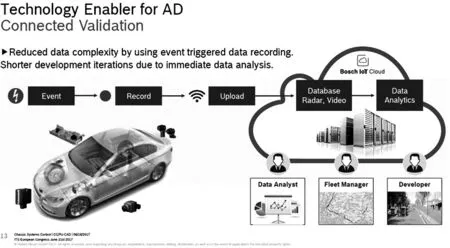
圖9 互聯汽車認證[3]
Autopilot:2017.7-2020.6
功能:自動代客泊車;
城市自動駕駛;
車隊:4臺智能駕駛車輛
地點:Vigo市
C-MOBILE項目2017.6–2020.11
功能:
●提升交通效率(綠色優先權、GLOSA,動態限速、嘗試車輛數據)
●基礎設施到車輛安全(RWW、RHW、EVW、違反信號警告、行人警告系統)
●車與車安全(城市ACC、緊急制動燈、SVW、VRUs警告)
車隊:20臺卡車、10臺公交車、30輛轎車、10輛緊急車輛和10臺摩托車
地點:Vigo城市與城間
C-ROADS項目(西班牙):2017.7-2020.6
功能:Day 1,Day 1.5協同服務;
●城市自動駕駛;
●自動代客停車;
●高速路代客駕駛;
●最后一英里自動駕駛接駁客車服務。
車隊:30臺私人車輛,15臺出租車,30臺公交車,5臺緊急車輛,5臺自動駕駛車輛
地點:葡頭牙智能走廊
卓越的系統專業知識-應對自動駕駛挑戰的關鍵
信息與通訊技術(ICT)在實現移動互聯網中扮演重要角色,見圖10。

圖10 信息與通訊技術(ICT)框架[5]
5 結束語
當前互聯智能駕駛(Connected and Automated Driving,CAD)技術發展需要測試與認證技術整合,包括傳感器和感知技術、功能與控制、道路和基礎設施適應和人機界面技術(HMI)發展。
通訊技術公司與主機廠聯盟,為智能汽車技術發展提供互聯技術支撐。
Volker Fricke提出標準化、數據隱私與安全是成功部署互聯移動(Internet of Mobility)的重要元素[5]:
●標準在當今國際標準中至關重要,在當今國際標準中必不可少,互聯世界確保互聯互通性和互操作性;
●聯網車輛和C-ITS領域相關標準的選擇和推廣具有挑戰性,因為有時在同一領域競爭;
●需要采用端到端安全方法來應對實際和未來的威脅,并滿足所有標準機構的合規要求;
●黑客的威脅將隨著時間增加而增加,并通過聯網車輛的進一步數字化威脅將進一步增加;
●端到端安全審查是處理這些威脅的關鍵;
●這將對當前車輛構架產生影響;
●汽車制造商和供應商應面對這樣的新挑戰。
Dr.Eckard Steiger提出了全球主機廠高度關注智能駕駛核心技術[3],包括:
●環境感知:所有場景高度可靠;
●認證和發布流程:智能駕駛車輛和系統保障;
●系統智能化:解釋形式、規劃、決策和執行;
●定位:實時更新高精地圖;
●法律:全球標準和清晰的職責;
●系統構架:感知、ECU和執行機構冗余;
●可靠和安全:技術失效的保護和網絡攻擊的保護。
猜你喜歡
汽車與安全(2019年9期)2019-11-22 09:48:03
表面工程與再制造(2019年6期)2019-08-24 06:40:04
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
商周刊(2018年18期)2018-09-21 09:14:46
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
作文大王·低年級(2016年4期)2016-04-18 00:24:37
決策探索(2014年21期)2014-11-25 12:29:50