電子控制技術在汽車中的若干應用
2018-10-10 06:41:56
汽車文摘 2018年10期
汽車電子化、智能化是現代汽車發展的重要標志之一。汽車電子的應用可以大幅度提升汽車的安全性、穩定性、舒適性等各方面性能。隨著市場和產業的發展,汽車已不再是一種單純的代步工具,而是成為了集休閑娛樂為一體的個性化產品。汽車電子技術產品剛好可以滿足消費者這一需求。本文將從幾個角度對電子技術在汽車上的應用進行總結。
1 自主駕駛及無人駕駛多電機電動賽車的扭矩矢量控制[1]
具有多個電動機的電動車輛支持連續的直接橫擺力矩控制,也稱為扭矩矢量控制。例如,通過延長車輛轉向不足特性的線性區域,可以顯著地增強轉彎響應和獲取最大橫向加速度。對于傳統的駕駛員操縱的汽車來說,這些技術有很好的表現和應用,但是有關自動/無人駕駛車輛所能提供信息很有限。特別是在過去幾年中,用于自動駕駛的轉向控制器在轉彎極限駕駛中已經取得相當程度的提升,但目前還不清楚這些控制器應該如何與扭矩矢量系統整合到一起。
本文討論了扭矩矢量控制的集成和自動駕駛,包括為新奇自動駕駛電動汽車比賽設計和完成的扭矩矢量控制器。該論文介紹了主要的車輛特性和控制架構(見文中Figure 3)。引入準靜態模型來預測在不同縱向加速度下轉向不足的特性。該模型與先前調查的離線優化扭矩矢量控制的潛在好處鏈接到一起。增益預定比例積分控制器增加偏航阻尼,從而增強瞬態響應。仿真結果證明了該方法的有效性。
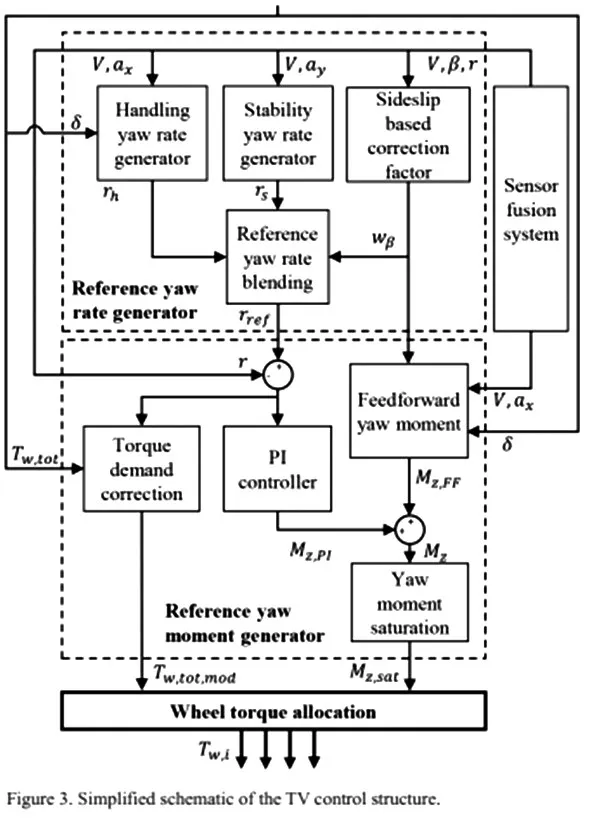
Figure 3.Simplified schemartic of the TV control structure
案例研究電動賽車的轉彎響應很明顯受其空氣動力學特性的影響,即車輛轉向不足和轉向過度的程度完全受車速影響并隨車速而變。在一些操作條件下,沒有扭矩矢量控制器的車輛被動響應不穩定。由前饋和反饋增益組成的相對簡單的扭矩矢量控制結構允許塑造車輛轉向不足的特性,并確保它們與縱向加速度的一致性。可以設計轉彎極限處的非線性特性以實現穩定的操縱。需要時可以使用單輸入單輸出反饋PI控制器跟蹤參考橫擺率并限定車輛側滑角。
2 一種應用于無信號交叉路口聯通自動車輛的離散式能量控制最優框架[2]
本文解決了聯通和自動車輛(CAV)在沒有任何明確的交通信號條件下穿過市區十字路口的最佳控制的問題,以便在滿足流量最大化要求的情況下而能量消耗最小化。表明流量最大化問題的解決方案僅取決于強加CAV的硬性安全約束條件和其結構實現了能量最小化離散的最佳控制問題模式。作者提出一個這些離散問題的完整解析解決方案,并推演出滿足可行解決方案的所有安全約束條件。通過仿真說明了所提出的解決方案的有效性(見文中Fig.5),提出的離散框架具有實質性的雙重效益,也改善了續駛里程。
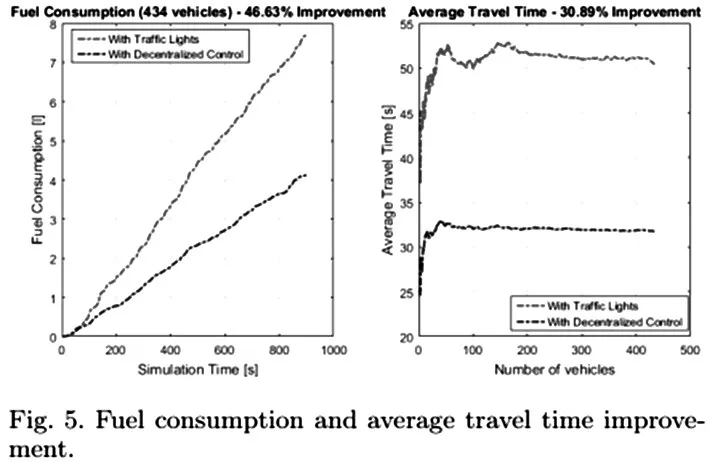
Fig.5.Fuel consumption and average travel time improverment.
這種方法的含義是車輛沒有在交叉路口停下來,從而節省動力和燃料,同時也增加行駛時間。此外,通過優化每輛車的加速/減速,最大限度地減少了發動機的瞬態操作,因此從燃油消耗方面也帶來益處。已經解決了CAV在沒有任何明顯交通信號情況下穿越城市交叉口最佳控制問題。目標是盡量減少能耗受制于吞吐量最大化要求和嚴格的安全限制。表明后者的解決方案僅取決于對CAV施加了嚴格的安全限制條件,它的結構實現分散的能量最小化最優控制問題模式。作者提出了一個完整的分析解決方案,并推演出滿足可行解決方案所有已有的安全約束條件。通過仿真驗證了所提出的解決方案的有效性,該仿真表明所提出的框架優點是真實的。
3 使用卡爾曼濾波器和基于神經網絡方法的精確定位車輛估算[3]
準確檢測車輛位置在許多智能運輸系統中起著重要作用,尤其是車-to-車應用。在本文中,作者提出了一種基于擴展卡爾曼濾波器(EKF)的方法來檢測這種基于車輛的應用的全球定位系統(GPS)誤差(文中Fig.2)。為了把卡爾曼濾波器參數與車輛定位校正GPS誤差應用調諧好,提出了一種機器學習方法,作者還提供了在以前的車輛GPS軌跡上訓練的自由神經網絡模型用以預測當前的車輛位置。基于實際數據所完成的實驗結果表明,這個用作探測和減少GPS錯誤系統有效。用于EKF參數調諧的機器學習算法可以通過車載學習得以推行。而所建議采用的GPS錯誤探測方法可以在車載應用當中加以推廣。
Fig.2.Architecture of GPS error-correcting neural network.
從上述試驗中,該系統經過基于固定線路所收集的數據訓練和測試,但有多個驅動程序。作者使用相同的卡爾曼濾波器參數計算,見第4分章節B部分,但測試了一條全新的路線。這條路線在當地開車約9英里12 min(見文中Fig.13)。采用兩個數據采集系統。第一個提供高質量的GPS測量結果,采樣率為100 Hz。使用此設備捕獲的信號被認為正確標記數據。第二個為擁有采樣率為1 Hz的低質量設備。這個設備信號被認為是發送到卡爾曼濾波器的有噪音的輸入信號。
如圖14所示標繪出作為時間函數的卡爾曼濾波器估算錯誤細節。需要注意的是,運行開始時的錯誤量很大,但過了一段時間后,卡爾曼濾波器在去除噪聲方面非常有效。
Fig.13.A new route consisting of 9 miles of city driving and approximatcly 12 minutes.
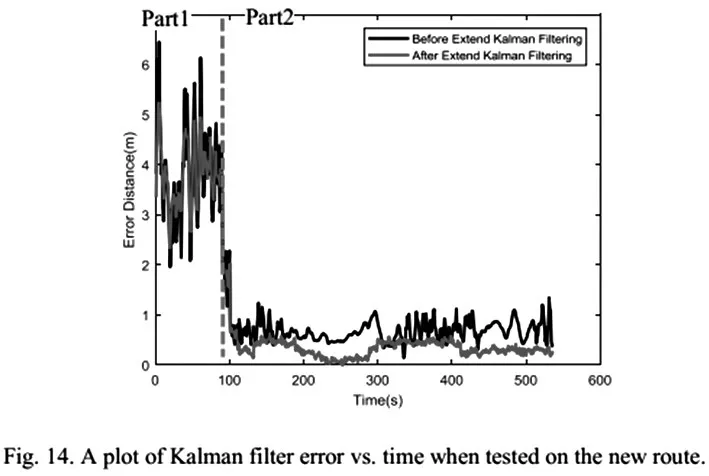
Fig.14.A plot of Kalman filter error vs.time when tested on the new route.
4 控制交通流量的方法—有限狀態過渡模型的自動控制合成[4]
如今,隨著人口越來越多,城市越發需要智能交通系統,以便有效利用現有的交通基礎設施。然而,無效的交通流量管理是普遍存在的,包括69億小時的額外旅行時間和31億美元加侖燃料浪費。為了降低這些成本,下一代運輸系統將包括互聯車輛,互聯的基礎設施和提高自動化水平。此外,在可預見的未來,這些進步點必須與傳統技術共存。這種復雜性使得改善移動性和安全性的目標更令人生畏。為了解決這種復雜性,需要為運輸系統配備可變化和自動驗證和綜合技術。為了確保安全和改進移動出行,正規驗證方法和集成控制系統是為人們提供很具有未來前景的自動化手段。最初開發了用于指定和驗證軟件和硬件系統的正確行為以及合成該系統的正規方法。現在一項重要的研究工作是確保這些這些方法對于傳輸系統是可變的,具有高度適應能力和可靠性。
本文將LTL視為規范語言。LTL允許考慮使用的特定時間范圍重復申請運營商。其他時間邏輯,例如信號時間邏輯,允許直接包含時間范圍,例如,通過指定某個時間邏輯觀察發生在指定的時間范圍內。另外,可以考慮概率規范并在合成控制器時包括最優性約束。特別是概率保證適用于運輸管理等領域需要正確控制但不是絕對關鍵的。例如,規范可能是“概率為95%,交通鏈路仍未擁堵。
本文介紹了一種正式的控制方法:交通流網絡。首先,一個動態模型可以控制重要的交通流現象(見文中Figure 8,Figure 9),例如考慮到流量受阻產生了擁堵。為了實現這個模型,我們做了幾個簡化的假設;例如,所有車輛都采用“單個商品”的觀點假設行為相似。

接下來,本文回顧了基于有限狀態抽象的系統離散時間動態有限記憶控制器形式合成的一般方法,這種抽象超越了潛在的動態。具體來說,對于每個輸入,抽象至少可以實現可能的轉換真實的系統。這種方法確保了適合抽象的控制器合成,可以保證真實系統滿足相同的規范。
5 基于使用低成本傳感器融合速度和航向角觀測器的車輛定位[5]
車輛定位系統可用于各種汽車應用。本文主要關注實用性,提出了一種使用低成本傳感器融合系統的新的車輛定位方法,它結合了全球定位系統的數據(GPS)以及來自易于使用的車載傳感器的數據。作為車輛定位一部分,就車輛速度和航向角估算設計了一種新型非線性觀測器。利用李雅普諾夫穩定性分析,研究了估計誤差的收斂性。基于該估計信息,具有基于規則邏輯的新的自適應卡爾曼濾波器提供給人們更加穩健而且高度準確的車輛位置估算。它調整噪聲協方差矩陣Q和R以便適應不同駕駛操控和不斷變化的GPS條件等各種環境。通過使用商用車輛的試驗結果驗證整個系統性能。最后,通過比較研究,所提出的算法的有效性得以確認。
近年來,已經為智能交通系統(ITS)、自動車輛應用和高級駕駛輔助系統(ADAS)開發出車輛定位系統。特別是一些ADAS應用,如電子收費、交叉路口碰撞警告和彎路速度警告、與車輛定位有重要關聯。值得注意的是,全球定位系統(GPS)變成大多數戶外陸地導航的普遍使用的傳感器。然而,標準商用GPS用于某些GPS停運條件,例如市區、隧道、和其它惡劣環境下還存在太多問題。
為了實現準確、不間斷、可靠的車輛定位系統,許多研究人員和行業專家已開發出由其它傳感器輔助的集成GPS。對于慣性導航系統(INS),由于其相對高的采樣率和準確性,而被認為是常規的解決方案。
本研究提出了一種新的車輛定位方法(見文中Fig.1),包括非線性觀測器和新的自適應卡爾曼濾波。使用低成本傳感器融合的非線性觀測器在車輛速度和航向角方面呈現出高精度和可靠的估算結果。另外,由于它易于調諧和實施,可以很容易地應用于生產。新的自適應卡爾曼濾波器,它具有針對卡爾曼增益基于規則的邏輯,可在各種駕駛條件和惡劣的GPS環境中提供穩定的估算性能。
綜上所述,本文提出的車輛定位算法
與以往的研究不同:
(1)它伴隨著速度和航向角估計,既可用于ITS應用也可用于車輛控制系統中;
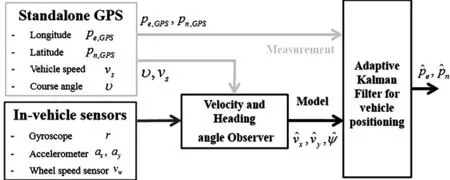
Fig.1 Flowchart of the proposed vehicle positioning system
(2)基于低成本傳感器融合,具有成本競爭力;
(3)它由于計算量小,可用性高、更新速度快、可靠估算性能,因此可以在生產中輕松實現。
本文證明了所提出的基于非線性觀測器的自適應卡爾曼濾波器,可以為開發精確的車輛定位系統做出重大貢獻。
猜你喜歡
閱讀與作文(英語初中版)(2021年8期)2021-09-13 02:16:29
北京航空航天大學學報(2017年9期)2017-12-18 07:12:25
Coco薇(2016年2期)2016-03-22 02:42:52
電源技術(2016年9期)2016-02-27 09:05:39
數字通信世界(2015年10期)2015-12-21 12:22:54
電源技術(2015年1期)2015-08-22 11:16:28
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
自動化博覽(2014年10期)2014-02-28 22:33:42
電子設計工程(2014年6期)2014-02-27 11:56:54