超聲波指紋識別技術在汽車進入系統中的應用
2018-10-10 09:11:10吳麗華
汽車工程師 2018年9期
吳麗華
(比亞迪汽車工業有限公司)

現在大部分汽車廠商都已經具備無鑰匙進入系統的技術,但是這種無鑰匙進入系統仍需要駕駛員把鑰匙帶在身邊,完全沒有擺脫出門找鑰匙的困擾。隨著圖像識別技術的發展,越來越多的人開始研究將生物特征作為身份識別的可能性,而指紋識別技術就是在這樣的環境下誕生的。指紋作為一種生物特征,其特有的唯一性和隨時間不變性讓身份驗證成為可能,進一步真正地實現不帶鑰匙就能夠啟動汽車[1]。由于在現實生活中指紋容易發生泄漏,所以就給了不法分子通過復制指紋盜取車輛的可能性,因而如何設計識別精度高又經濟實用的指紋識別系統顯得尤為重要。文章就超聲波指紋傳感器在汽車無鑰匙進入系統中的應用展開了分析與討論。
1 指紋傳感器的發展
指紋識別傳感器發展到現在已有3代[2]。
第1代是光學傳感器,其原理是利用光在指紋凹凸紋路上折射的角度及反射光的明暗程度進行識別。
第2代是電容傳感器,其原理是利用硅晶元與導電的皮下電解液形成的電場,指紋高低起伏的紋路會導致兩者之間的壓差出現不同的變化,進而實現準確識別。
第3代即文章所述的超聲波傳感器。
第1代和第2代指紋傳感器采集到的是2D平面圖像,因此很容易通過普通硅膠或導電硅膠復制指紋,這些破解方法已經在手機的應用中得以證實。盡管有些廠商已經在第2代電容傳感器的基礎上增加了活體指紋識別,但仍不能保證該方法100%不被破解。表1示出現在常見的指紋破解方法所用到的材料、工藝、概率及成功或失敗的原因。
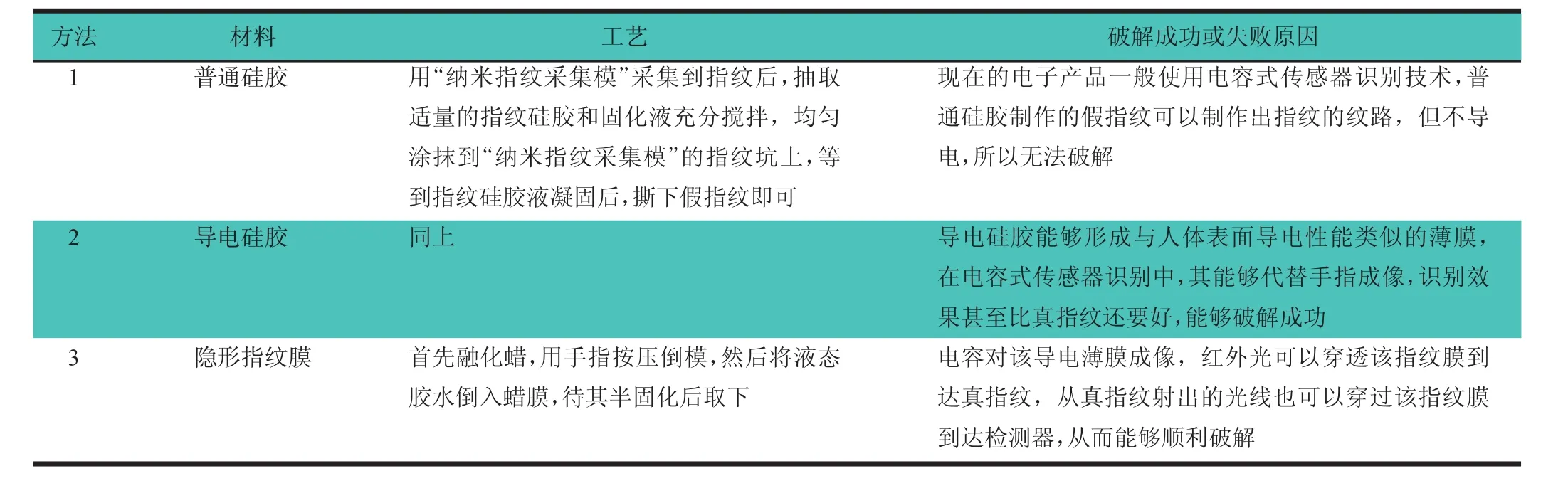
表1 常見指紋破解方法
2 超聲波指紋識別的原理
通過對超聲波傳感器施加脈沖電壓激勵,使傳感器發出超聲波脈沖。由于入射聲波在穿過不同介質或者顯著聲阻抗時會發生反射和透射,當兩介質的聲阻抗差異較大時(Z1>>Z2或 Z1<<Z2)[3],透射率幾乎為 0,聲波幾乎全部返回。超聲波識別指紋時,兩介質(空氣和皮膚)聲阻抗差異大,根據反射波在幅值、相位等信息上的變化,就可以建立內部指紋特征,確定指紋谷、脊的位置并生成具有3個維度的指紋圖像。
當超聲波檢測到真皮下的指紋時,反射波聲壓和指紋形狀輪廓有密切的關系,其反射聲壓(Pr/Pa)表示為:

式中:P0——入射波聲壓,Pa;
S——指紋輪廓面積,m2;
λ——超聲波波長,m;
d——聲源到指紋的距離,m。
從公式可以看出,只要提高傳感器密度,提高入射波和反射波的識別分辨率,就能夠確定指紋形狀的大小,這是超聲波指紋圖像采集的基本原理,如圖1所示,其采集深度可達到皮膚真皮層。
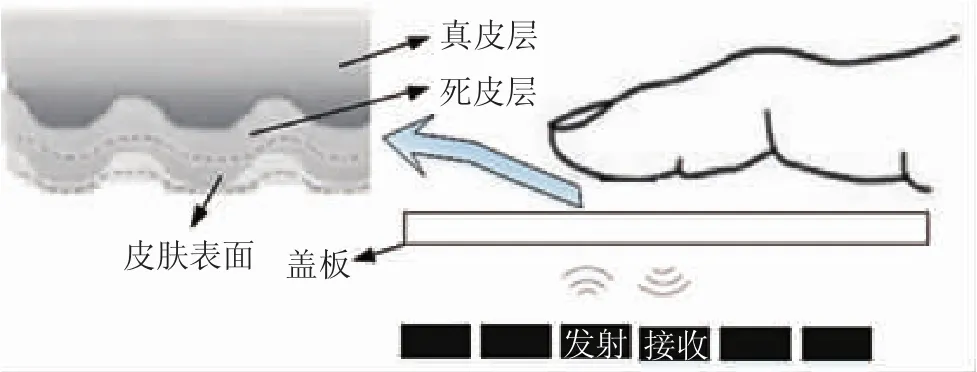
圖1 超聲波指紋圖像采集原理
在檢測到指紋圖像之后,對其采取預處理、特征提取、特征比對及活體檢測等一系列步驟,最終得出匹配結果,指紋圖像處理流程,如圖2所示。
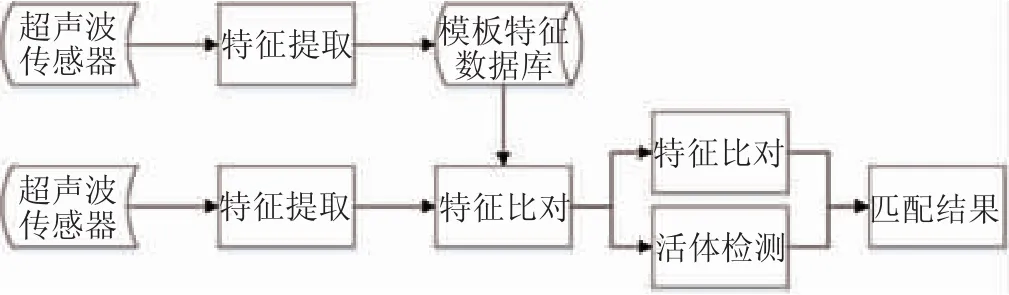
圖2 指紋圖像處理流程
3 超聲波指紋傳感器的優點
1)安全性高。超聲波掃描可以對指紋進行更深入的分析采樣,能滲透到皮膚表面之下識別出指紋獨特的3D特征,再加上血液活動、心率等活體檢測技術[3],使得超聲波指紋傳感器的安全性非常高。
2)穿透能力強。超聲波傳感器能夠穿透如0.65 mm的鋁合金、0.8 mm的有機玻璃、人工藍寶石及塑料等,這就使得手指無需與指紋傳感器直接接觸,傳感器進而可以隱藏在多種材質的內側,免去了外界惡劣天氣(如雨水、冰、雪及塵土等)對指紋識別的影響。
3)精度和深度高。超聲波傳感器在手指存在污垢、油脂以及汗水的情況下依然能夠準確地識別指紋,甚至在水下也能成功解鎖,這點是前2代傳感器所不能媲美的。
4 智能進入系統設計
4.1 系統原理
智能進入系統由單片機(MCU)、指紋模組、車身控制器(BCM)和外圍電路等組成,如圖3所示,初始狀態下指紋模塊處于休眠狀態,當手指指紋按壓指紋傳感器時,指紋模組常電模塊檢測到指紋,指紋模組向MCUI/O口發送喚醒信號,觸發工作。MCU喚醒之后通過控制電源向指紋模組主控供電。模組在供電的情況下進行指紋采集、指紋預處理、指紋特征提取及匹配等,最終得出含有匹配結果的一串協議碼。MCU將得出的匹配結果進行識別并將結果以CAN報文的形式發送給鑰匙控制器,鑰匙控制器對結果進行雙向加密驗證,只有驗證通過之后鑰匙控制器才會發送給BCM和電子轉向柱鎖(ECL)[4],這樣整個基于超聲波指紋識別的解閉鎖過程就實現了。BCM除了要完成常規電子鑰匙解鎖的功能之外,如解鎖、示廓閃爍及身份識別[5]等,還增加了其他輔助功能(智能座椅調節、智能后視鏡調節、智能轉向管柱調節)。
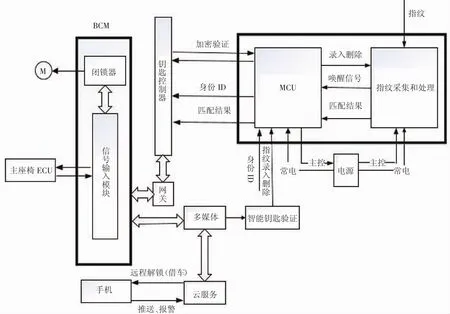
圖3 智能進入系統框架
4.2 系統詳細設計
4.2.1 硬件設計
硬件部分主要由MCU、指紋模組、電源及CAN收發器等組成。
4.2.1.1 MCU
本設計所采用的MCU為飛思卡爾64-Pin的MC9S08DZ60單片機,主要進行信息的處理以及信息的控制。它通過串口通信端口(SCI)和指紋模組相通信,通過CAN通信端口TXCAN以及RXCAN和CAN收發器通信。
作為整個硬件電路的“大腦”,MCU控制著硬件電路各個模塊的工作以及相互間的通信,其具體功能,如表2所示。
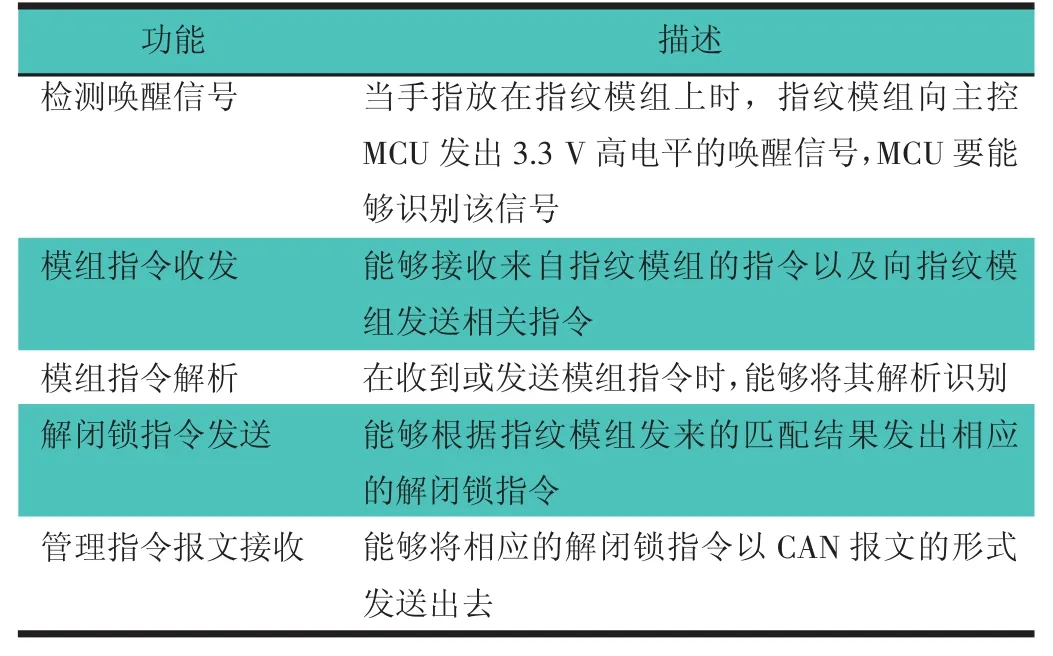
表2 MCU功能描述
4.2.1.2 指紋模組
選用某型號為FZX-1008的6-Pin指紋識別模組。具體引腳布置及與MCU連接示意圖,如圖4所示。
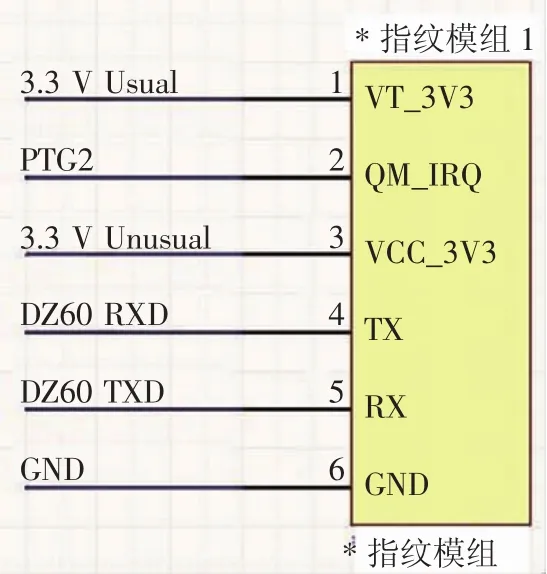
圖4 指紋模組引腳及與MCU連接示意圖
其中1~6號引腳定義分別為:1)常電3.3 V,用來給指紋檢測模塊供電;2)喚醒信號(3.3 V的高電平信號)輸出引腳,當模組檢測到指紋時該引腳輸出喚醒信號;3)MCU供電引腳,MCU檢測到高電平信號后給該引腳供3.3 V電壓;4)數據發送引腳;5)數據接收引腳;6)接地引腳。
4.2.1.3 電源
車載電源(12 V)通過二極管導通后,經ZD302穩壓管穩壓后輸入L4949ED穩壓芯片,產生5 V的穩壓電源(供給MCU、CAN收發器),然后通過型號為AMS1117的正向低壓降穩壓器,產生3.3 V的穩壓電源(常電),最后通過一個NPN管和一個PNP管的組合電路,輸出一個非常電的3.3 V電源,如圖5所示。
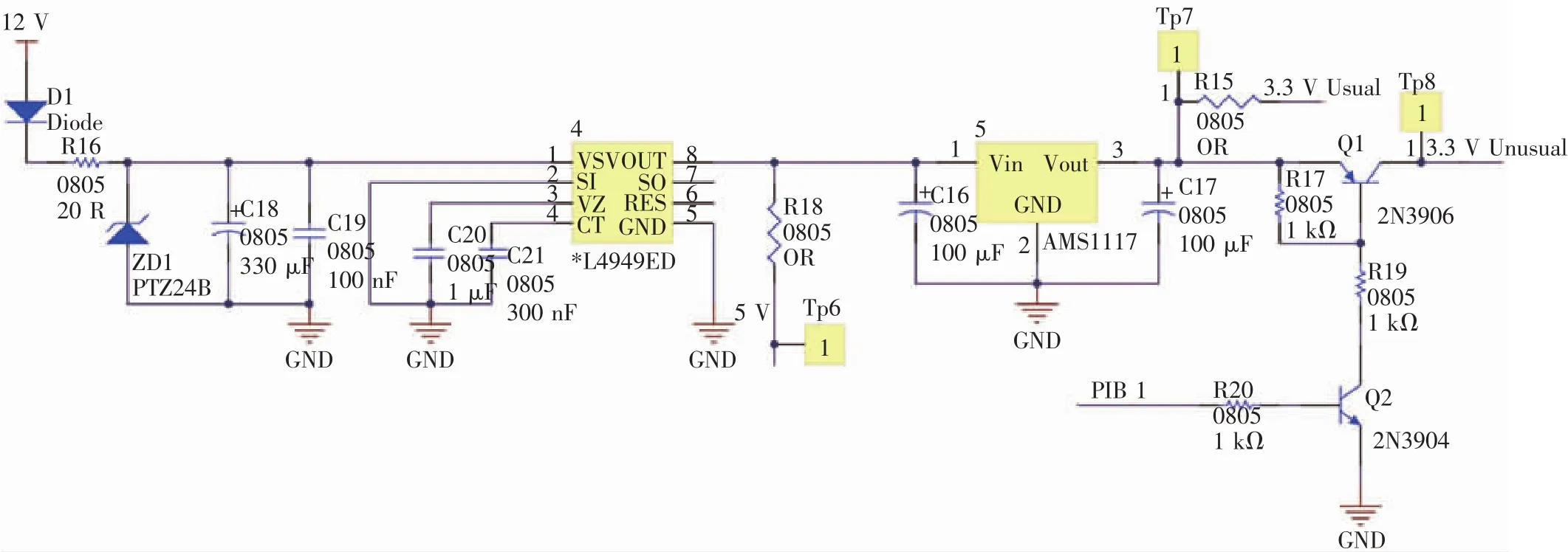
圖5 智能進入系統電源電路的設計
4.2.1.4 CAN收發器
本模塊選用NXP公司的TJA1042高速CAN收發器芯片,最高速度可達1 Mbit/s。TJA1042是TJA1040、PCA82C250和PCA82C51的升級版,TJA1042的電磁兼容性(EMC)更好,休眠狀態的電流更小。其芯片的引腳及定義,如圖6所示。
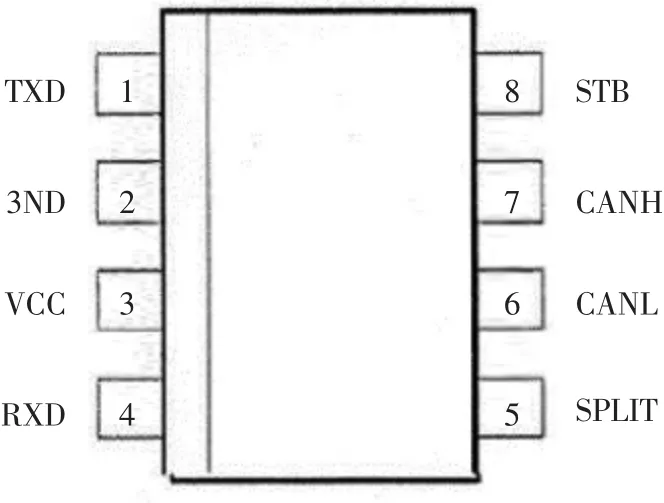
圖6 TJA1042收發器引腳圖
為了滿足CAN電路物理層參數和EMC的需求,CANH(連接CAN高電平)和CANL(連接CAN低電平)要各連1個磁珠,磁珠可選擇100 MHz交流頻率時阻抗為220R或者更大的規格,需預留2個62R的終端電阻焊盤,并且封裝要求是0805的。同時電源和地之間需要加一個電容來防止干擾,為了增加EMC性能,還需要在RXD和TXD的引腳上加上對地的電容,但是只能加小于20 pF的電容。
4.2.2 軟件設計
軟件的設計要以功能實現為最終目的。程序主函數設計之初要預先定義好的驅動包括:串口驅動、接口代碼、CAN收發驅動和模組參數設置及指令協議處理模塊。驅動完成之后再對寄存器進行配置以及端口的初始化,包括I/O口、定時器及串行接口等。在明確了每個端口的功能定義之后就能夠在程序主函數里將指紋的匹配結果轉化為相應標識符CAN幀格式,并發送到車輛啟動網CAN總線上,進而實現該系統所具有的功能,具體流程,如圖7所示。
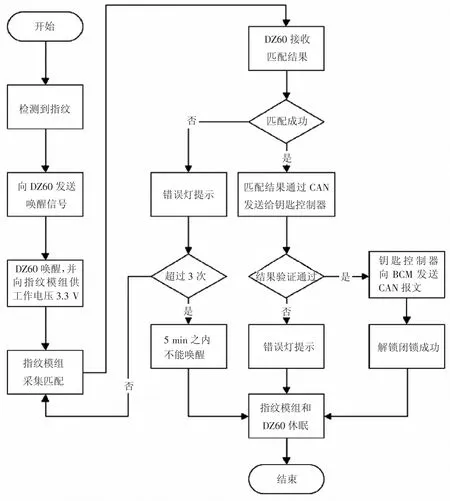
圖7 智能進入系統軟件設計流程圖
指紋識別的處理程序分為指紋錄入和指紋匹配2個模塊,通過MC9S08DZ60向其發送相應的協議碼便可實現不同的功能,其具體流程,如圖2所示。為了增加系統的防盜安全性,指紋匹配的結果不再是簡單的高低電平信號,而是與功能模塊類似的一串協議碼,并規定有效數據位。只有當MC9S08DZ60正確識別該協議碼中的有效數據,它才會向整車CAN網絡發送相應報文。
5 結論
截至目前,在國內市場還沒有指紋解鎖技術的量產車型,由于超聲波指紋識別在安全性上較以往技術有大幅提升,使其在汽車運用方面變得更加可能。指紋識別進入系統在保障安全性的同時,大幅度地提高了使用便捷性,提升了用戶體驗,從而真正實現“無鑰匙”進入。
猜你喜歡
房地產導刊(2022年9期)2022-09-19 07:04:06
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
兒童故事畫報(2016年3期)2016-05-17 07:54:55
小天使·二年級語數英綜合(2016年6期)2016-05-14 01:42:06
小朋友·快樂手工(2015年2期)2015-03-13 00:15:54