基于時變增益ESO的多航天器SO(3)姿態協同控制
2018-10-10 07:02:58馬鳴宇董朝陽王青周敏
北京航空航天大學學報 2018年9期
馬鳴宇, 董朝陽, 王青, 周敏
(1. 北京航空航天大學航空科學與工程學院, 北京 100083; 2. 北京電子工程總體研究所, 北京 100854;3. 北京航空航天大學自動化科學與電氣工程學院, 北京 100083; 4. 航天系統仿真重點實驗室 北京仿真中心, 北京 100854)
多航天器姿態協同是指通過設計恰當的協同控制律,利用航天器之間的信息交互使得各航天器姿態保持一致。在航天器控制領域,姿態協同具有廣泛的應用前景。多顆小衛星通過對衛星間的相對姿態進行協調,可以協同工作完成復雜的任務,具有成本低、研制周期短、應用方式靈活等優點[1];在航天器交會對接、衛星捕獲等航天作業中,姿態協同也是一項關鍵技術,具有重要的研究意義[2-3]。因此,多航天器系統的協同控制問題得到越來越多的重視和研究[4-6]。
對于單個航天器的姿態控制問題,國內外學者采用自適應控制[7]、魯棒控制[8]、滑模控制[9]等多種方法進行了研究,取得了豐富的研究成果。在上述方法中,航天器的姿態大多采用的是歐拉角、四元數[10]或羅格里德參數模型[11],在姿態運動范圍較小時可以取得良好效果,但仍存在一定的局限性。歐拉角模型在姿態角全局范圍變化時會出現奇異,導致基于這種方法設計的控制器也只適用于某個范圍內;采用四元數進行姿態表示的方法能夠避免奇異,但其與旋轉矩陣的映射不具有唯一性,用于控制時可能導致姿態散開,引起系統性能下降[12];羅格里德參數模型同樣存在非全局與不唯一性。為了解決這些問題,文獻[13-14]提出了基于特殊正交群(Special Orthogonal Group,SO(3))的姿態建模與控制方法。SO(3)與旋轉矩陣是一一對應的,滿足姿態描述的全局性,相比傳統區分通道分別設計的方法更為統一,且不存在奇異問題。針對個體控制問題,SO(3)方法已經取得了一定的研究和應用成果。文獻[14-15]采用旋轉矩陣對航天器姿態進行建模,克服了姿態展開現象。文獻[16]詳細討論了單剛體的SO(3)姿態跟蹤控制問題,保證了系統的全局指數穩定性。
另外,在實際復雜的環境中,航天器系統不可避免地會受到干擾,而干擾會造成系統的穩定性能和協同效果下降。文獻[17-18]分別考慮了存在執行器安裝偏差和不確定性情形,提出了航天器魯棒控制方法,屬于對干擾的被動抑制。針對干擾的主動抑制控制,以擴張狀態觀測器(Extended State Observer, ESO)為核心的自抗擾控制方法近年來得到越來越多的關注。ESO將系統的不確定性和干擾等效為總干擾,以其作為擴張狀態進行實時估計,進而在控制器設計中可以針對系統的總干擾進行補償,提高系統的抗干擾能力。ESO的穩定性分析相對復雜,目前主要基于Lyapunov理論開展。文獻[19]證明了可以通過嚴格構造Lyapunov函數完成對常值增益的線性ESO的收斂性分析。而對于非線性ESO則需要假設Lyapunov函數存在[20],不便于控制器設計和穩定性分析。因此在后續研究中,線性ESO已經得到了一定的實際應用[21-23]。但需要注意的是,線性常值增益ESO在初值和系統初值不一致時,經常會出現峰化現象(peaking phenomenon)[24-25],對系統造成不利影響。
相比單個航天器,多航天器控制系統更為復雜[26]。而對于多航天器系統的SO(3)建模、ESO設計以及協同控制問題,目前研究還比較有限。除了個體動力學外,航天器之間的通信拓撲也會對系統的整體行為產生影響。在多航天器SO(3)控制中,需要根據拓撲結構設計恰當的SO(3)形式的協同指令。同時,由于SO(3)模型中姿態采用矩陣而非向量表示,因此針對SO(3)模型的ESO也需要重新設計和分析。
考慮到上述問題,本文將SO(3)姿態描述引入到多航天器系統,結合航天器之間的有向通信拓撲建立其協同控制模型。在此SO(3)模型上設計了一種時變增益ESO對系統的總干擾進行估計,在保證觀測誤差收斂的同時,削弱常值ESO的峰化現象。進一步,利用相鄰航天器的信息構造了SO(3)形式的協同控制指令,并設計了對應的協同控制器,從理論上證明了閉環系統的穩定性,所提出的方法能夠實現干擾情形下多航天器系統的有效協同。以5個包含不同干擾和不確定性的航天器系統進行了仿真,驗證了理論分析結果。
1 多航天器姿態模型建立
1.1 航天器姿態SO(3)模型
在三維空間中,姿態代表了航天器本體坐標系與慣性坐標系之間的旋轉關系,而坐標系之間的旋轉變換可以用一個正交變換矩陣R來表示,所有的正交變換矩陣構成了SO(3)群:
SO(3)={R∈R3×3|RRT=I3,detR=1}
(1)
任意姿態都與特定矩陣R∈SO(3)一一對應。因此,可以考慮采用SO(3)中對應的元素R來表示航天器的姿態。令Ω=[ω1ω2ω3]T,定義運算
(2)
為hat映射。hat映射的逆運算∨稱為vee映射,其將任意三維反對稱陣映射為三維向量,即
(3)

(4)

對式(4)進行展開后處理可得
(5)

(6)
對于干擾di,有如下假設[19-20]。

1.2 多航天器通信拓撲描述


2 線性時變增益ESO設計

(7)
(8)

對于式(8)所示系統,考慮設計以下形式的ESO:
(9)
式中:Lki(t)=diag{lki(t),lki(t),lki(t)},lki(t)為時變增益系數,k=1,2,3。

(10)

(11)

為了分析系統式(11)的穩定性,將其轉換為標準型:

(12)
式中:
其中:aki(t)為與lki(t)有關的函數,且滿足以下假設。
假設3aki(t)有界且三階連續可導,k=1, 2,3。
(13)
同理,與系統式(12)對應的可控性矩陣為
(14)
則系統式(11)到系統式(12)的坐標變換矩陣為
(15)
(16)
(17)
由Fi(t)、bi和bci的表達式以及式(17)中的第1個式子可以得出:
(18)
由式(18)可知,lki(t)能夠表示為aki(t)的函數,即可以通過設計aki(t)來保證系統式(12)穩定,進而保證ESO的穩定性。在確定合適的aki(t)后,ESO的參數也隨之確定。于是,考慮與系統式(12)對應的PD特征值和SD特征值分別為ρki(t)和μki(t)[25,27],定義:
T0i(t)=T1i(t)=1
(19)
(20)
T3i(t)=
(21)
則有如下關系成立:
(22)

引理1設ρki(t)為實數且滿足如下條件:
1)ρki(t)有界且三階連續可導;
2) 由式(19)~式(22)得到的aki(t)滿足假設3;
3) 存在常數c>0,使得ρki(t)≤-c<0。

(23)

(24)
考慮χci和χi系統的狀態轉移矩陣分別為Φχci(t,t0)和Φχi(t,t0),同理可得
(25)
(26)

(27)
(28)
從而證明了χi和χci是指數穩定的。
證畢
在此基礎上,關于觀測誤差的穩定性有如下定理成立。

Azi(t)χzi
(29)
式中:
Azi(t)=
(30)
由此可知:
(31)

(32)
易知存在常數c2>0,使得

(33)
再根據Pzi(t)的性質可知,存在正常數c3、c4和c5使得:
(34)
從而有
(35)

(36)
(37)
將式(37)代入式(36),則有
(38)

(39)
最終得到
(40)
證畢
注1定理1在引理1的基礎上分析了時變增益ESO的收斂性。若ρki(t)取1/ε的同階量,則觀測誤差有界且趨于ε的同階量。同時,在ρki(t)確定后,通過式(18)和式(22)可以計算得到ESO增益lki(t)。
3 SO(3)協同控制器設計

(41)
(42)
(43)
在姿態指令信號Rdi的基礎上,定義SO(3)中的相對姿態誤差和角速度誤差分別為
(44)
(45)
(46)
根據式(45)和式(46),航天器i的誤差方程可以表示為
(47)

(48)
4 閉環系統協同控制穩定性分析
證明選取閉環系統的Lyapunov函數為
(49)

首先證明V4的正定性。易知
(50)
(51)
(52)
(53)
進一步,考慮式(49)中Ψ(Ri,Rdi)對時間t的導數:
(54)
(55)

結合式(54)、式(55)對V5(ηi)求導可得
(56)
式中:
(57)
同時,根據前述的分析可知:
(58)
進一步,根據Young不等式,有
(59)
(60)
將上述結果代入式(56)中可得
(61)
式中:
(62)
(63)


(64)


(65)
(66)
(67)

證畢
注2通過航天器模型式(4)和控制器式(48)設計過程可以看出,本文提出的SO(3)協同控制方法允許各航天器具有不同的總體和控制參數,即適用于航天器異構的情況,有利于本文方法在工程中的應用。
5 仿真驗證

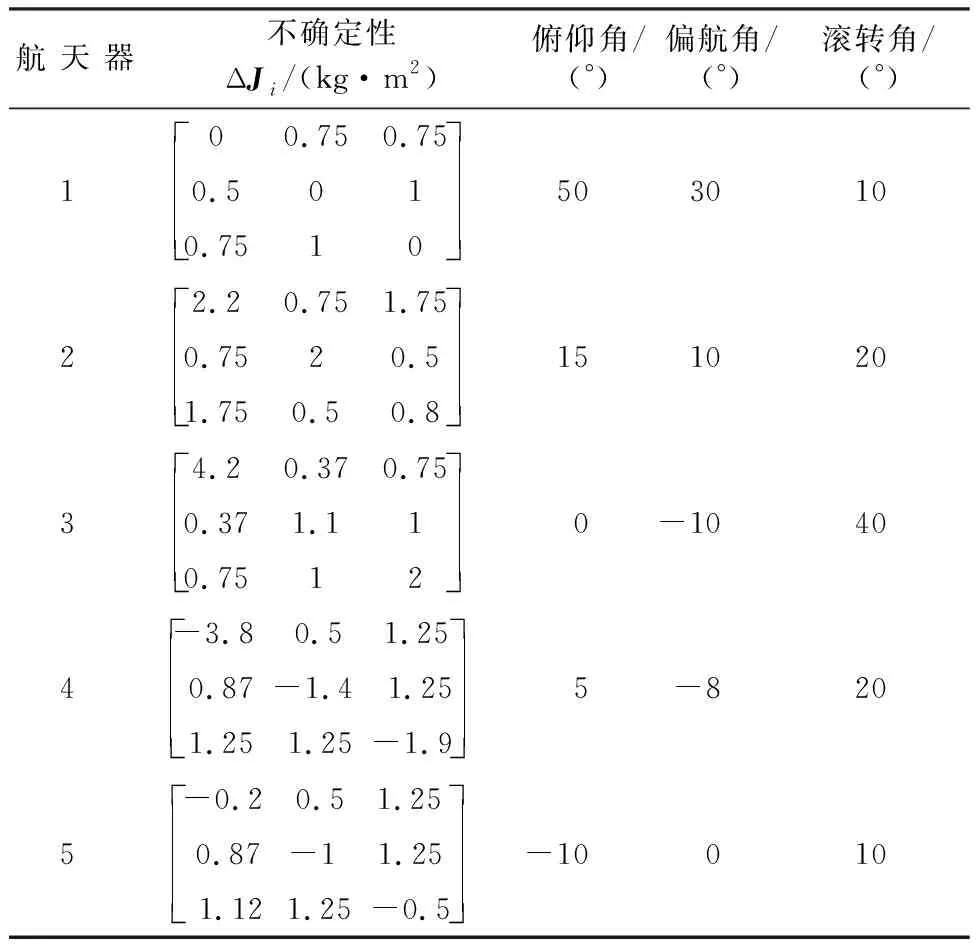
表1 航天器初始條件和參數

在協同控制器設計與仿真中,均采用R矩陣對航天器姿態進行描述,并基于SO(3)方法完成上述過程。為了便于結果呈現,本文在仿真結果圖中將R轉換為姿態角度進行表示。圖2給出了多個航天器的俯仰、偏航、滾轉角度隨時間變化曲線。可以看出,在存在干擾的情況下,多航天器系統能夠以較快的速度實現穩定的協同,控制效果良好。
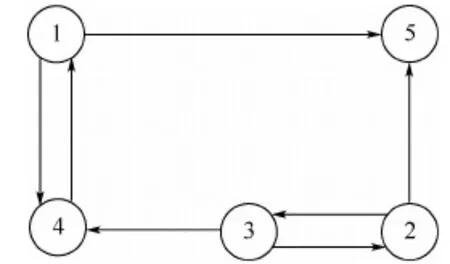
圖1 航天器通信拓撲Fig.1 Communication topology of spacecraft
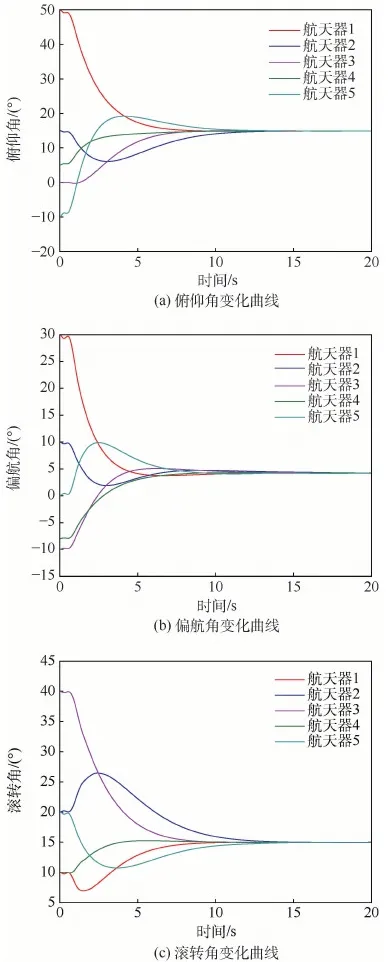
圖2 多航天器姿態角變化曲線Fig.2 Variation curves of attitude angles of multiple spacecraft
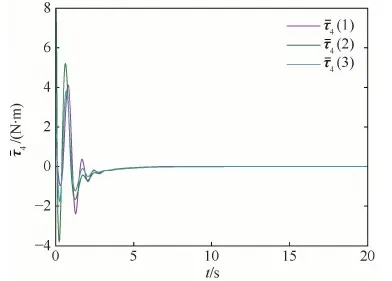
圖3 考慮干擾補償的控制力矩(航天器4)Fig.3 Control moment with disturbance compensation (Spacecraft 4)
進一步,為了定量描述各航天器姿態協同收斂情況,對比說明本文基于SO(3)方法的控制效果,定義:
(68)
式中:qi=ri-r1,ri=[φiψiγi]T,φi、ψi和γi分別為航天器的俯仰角、偏航角和滾轉角。
根據Q的定義可知,若Q趨于0,則表示多航天器實現了姿態協同。在相同初始條件與ESO參數的情況下,文獻[10]采用四元數模型,文獻[11]使用羅格里德參數。從圖5可以看出,文獻[10]方法和文獻[11]方法的Q值收斂到1°的時刻分別為10.87 s和7.26 s,而本文方法為5.88 s,驗證了本文方法的有效性和快速性。
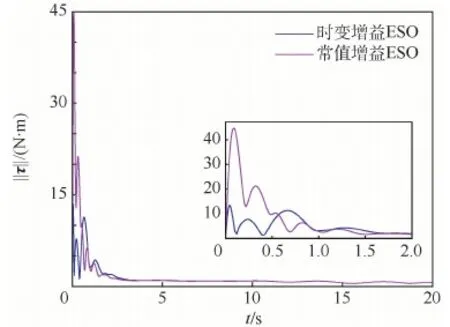
圖4 控制力矩范數對比曲線Fig.4 Comparative curves of norms of control moment
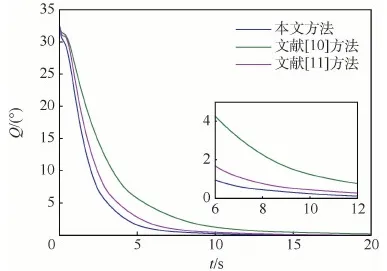
圖5 不同方法Q值變化對比曲線Fig.5 Comparative curves of Q with different methods
6 結 論
本文針對存在干擾情形下的多航天器系統,對其協同控制問題進行了研究。
1) SO(3)能夠從整體的角度對姿態進行描述,結合有向通信拓撲建立了多航天器SO(3)控制模型,并以此提出了相應的控制策略。基于SO(3)方法的協同控制是可行的。
2) 模型不確定性和外部干擾可以等效為系統的總干擾。在此情形下,設計了適用于SO(3)模型的線性時變增益ESO,所提出的時變增益ESO能夠完成對干擾的有效估計。相比常值增益ESO,時變增益ESO可以削弱峰化現象,降低了對控制力矩大小的需求。
3) 設計了SO(3)形式的協同指令,結合ESO可以對干擾進行觀測并在控制器中補償,保證干擾情形下多航天器的協同控制效果。本文給出了穩定性證明過程。
4) 仿真算例結果表明,多航天器系統能夠實現穩定協同,驗證了本文方法的有效性和快速性。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34