機械手回轉支架的模態(tài)及諧響應分析*
2018-10-10 11:20:46王文濤孟廣耀穆國振
機械制造 2018年7期
□ 王文濤 □ 孟廣耀 □ 穆國振 □ 李 正
青島理工大學機械工程學院 山東青島 266520
當前,我國加工制造業(yè)得到了迅速發(fā)展,自動化程度越來越高。在工業(yè)生產(chǎn)線上,傳統(tǒng)的人工上料方式存在效率低、精度差和勞動強度大等問題,已經(jīng)不能滿足現(xiàn)代工業(yè)生產(chǎn)線的工作節(jié)奏。在這種背景下,物料搬運機械手得到了迅速發(fā)展,越來越多的智能機械手用于工業(yè)生產(chǎn)線上料、搬運和卸載等工序中。物料搬運機械手可以改善工人的勞動狀況,代替工人進行重復枯燥的勞動,降低生產(chǎn)成本,增強企業(yè)的競爭力[1]。筆者研究的物料搬運機械手用于自動化生產(chǎn)線的上下料工序,其中回轉支架作為機械手重要的零部件,其結構剛度和強度對機械手的精度有很大影響,具體表現(xiàn)在回轉支架的抗振性和穩(wěn)定性方面[2-3]。
1 靜力學分析
1.1 有限元建模
根據(jù)實際設計尺寸,應用SolidWorks三維繪圖軟件進行機械手回轉支架建模。回轉支架的三維模型主要由軸承孔、底板、側板和腹板組成,局部位置有螺紋孔、走線孔和倒圓角等細小特征。有限元分析主要對回轉支架進行線性靜態(tài)分析,結構中的細小特征屬于非線性特征,對整體架構的性能影響較小,可以將這些小孔、倒角和不影響整體結構性能的細小特征進行簡化或忽略[4]。簡化后的三維模型不會對有限元分析的結果產(chǎn)生較大影響,而且可以加快有限元分析的計算速度,提高有限元分析的效率。
1.2 材料選取和網(wǎng)格劃分
機械手回轉支架選用的材料為結構鋼,密度為7.85×103kg/m3,彈性模量為 200 GPa,泊松比為 0.3。 三維模型的設計尺寸為長600 mm、寬500 mm、高900 mm,側板和腹板厚度均為10 mm,底板厚度為12 mm,回轉支架的總質(zhì)量為65 kg。將回轉支架的三維模型導入ANSYS Workench中,設定材料屬性,并采用智能網(wǎng)格劃分的方式對模型進行網(wǎng)格劃分,最終得到節(jié)點總數(shù)為9 784,單元總數(shù)為4 658。
1.3 邊界條件設置
機械手回轉支架的底板由螺栓固定在回轉底座上,軸承孔連接機械手大臂,伺服電機安置在回轉支架的內(nèi)部,可驅動機械手轉動,機械手大臂通過軸承在回轉支架內(nèi)完成仰俯運動。在有限元分析時,為了方便計算和分析,可將回轉支架的外部作用力簡化為約束載荷作用在有限元模型上。機械手底板對回轉支架的固定支撐可簡化為固定支撐約束。回轉支架軸承孔處所承受的機械手臂自身和所夾持物料的重力可以轉化為豎直向下的壓力載荷,對軸承孔處作用的壓力載荷為500 N。回轉支架帶動機械手大臂轉動時,機械手大臂會對回轉支架產(chǎn)生扭矩,可簡化為對回轉支架軸承孔處兩個方向相反的橫向載荷,大小為100 N。伺服電機轉動工作時產(chǎn)生的振動載荷對回轉支架有簡諧激勵作用。
1.4 結果分析
將有限元模型導入Static Structural模塊,通過靜力學分析得到回轉支架的等效應力云圖和總變形云圖,如圖1所示。由圖1可知,機械手回轉支架軸承孔內(nèi)側產(chǎn)生最大等效應力,其值為0.435 66 MPa,回轉支架上端存在最大變形,其值為0.002 mm。通過靜力學分析,得到機械手回轉支架受力情況良好,最大等效應力小于選用材料的許用應力(353 MPa),最大變形較小,不會對機械手的結構產(chǎn)生影響。回轉支架選用材料的靜強度滿足機械手的設計要求[5]。
2 模態(tài)分析
機械手在工作過程中,伺服電機對回轉支架有簡諧激勵載荷作用,這一簡諧激勵載荷容易引起回轉支架的彎曲變形、疲勞斷裂和劇烈振動等問題,最終導致回轉支架疲勞破壞。僅靜力學分析不能夠滿足機械手的設計需求,需要對回轉支架進行模態(tài)分析和諧響應分析,分析回轉支架是否能承受機械手正常工作時所產(chǎn)生的外部激勵載荷。通過模態(tài)分析和諧響應分析得到回轉支架需要改進的部位,為機械手后期的結構優(yōu)化提供理論指導[6-7]。
模態(tài)是機械結構的固有振動特性,只與結構的剛度和質(zhì)量分布有關,模態(tài)分析主要是確定結構系統(tǒng)的振動特性,得到固有頻率和模態(tài)振型之間的關系,有助于改進回轉支架的結構。
根據(jù)機械振動方程,對回轉支架建立振動微分方程[8]:

式中:[M]為回轉支架質(zhì)量矩陣;[C]為回轉支架阻尼矩陣;[K]為回轉支架剛度矩陣;{F}為外部激勵載荷向量;{X}為回轉支架位移向量為回轉支架速度向量為回轉支架加速度向量。
在對回轉支架進行模態(tài)分析時,由于模態(tài)為回轉支架的固有特征,因此回轉支架的阻尼和外部激勵載荷可忽略不計,則式(1)變?yōu)闊o阻尼自由振動微分方程:


▲圖1 回轉支架有限元分析
假設回轉支架以某一固有頻率振動,則式(2)解的形式為:

式中:{A}為回轉支架位移振幅向量;ω為激振載荷頻率;φ為位移響應初始相位角。
將式(3)代入式(2),可得:

([K]-ω2[M])=0 為振動微分方程的特征值方程,對特征值求二次方根即可得到回轉支架的固有頻率ωi(i=1,2,…,6),再通過有限元分析方法進行求解。
將有限元模型導入Modal模塊中,通過模態(tài)分析計算得到回轉支架的各階固有頻率和對應振型,見表2。回轉支架前六階振型如圖2所示。
3 諧響應分析
在簡諧激勵下的系統(tǒng)響應稱為諧響應,利用諧響應分析計算系統(tǒng)在不同激振頻率下的響應,可得到結構在系統(tǒng)內(nèi)的共振頻率,從而可設法避免結構發(fā)生共振,確保結構可在不同頻率的簡諧載荷下正常工作[9]。機械手在轉動過程中對回轉支架產(chǎn)生簡諧載荷,因此需要對機械手的回轉支架進行諧響應分析,計算其在不同頻率和振幅偏心簡諧載荷作用下的剛度和強度。由模態(tài)分析結果可知,回轉支架頂部是機械手工作時承受外部激勵載荷最大的部位,變形也最大。
回轉支架在簡諧載荷作用下受迫振動運動微分方程為:

將式(3)代入式(5),可得:

在諧響應分析時,將有限元模型導入Harmonic Response模塊中,輸入頻率參數(shù),計算得到回轉支架結構變形與激振頻率的變化關系曲線。查閱資料[10],有限元諧響應分析時模態(tài)分析計算出的固有頻率最大值,即第六階固有頻率應大于激振頻率范圍內(nèi)最大值的1.5倍。由表1可知,回轉支架模態(tài)分析的固有頻率范圍為41.833~178.41 Hz,因此,諧響應激振頻率的取值范圍為0~110 Hz。通過有限元分析計算,得到回轉支架頂部變形與頻率關系曲線,如圖3所示。
由圖3可以看出,結構在不同激振頻率的動載荷作用下,變形與頻率關系曲線的最低值出現(xiàn)在50~60 Hz,位于第二階固有頻率處,曲線的最大峰值出現(xiàn)在87.5 Hz,位于第三階固有頻率處。在第三、第四階固有頻率處易引起回轉支架共振,在設計機械手工作動載荷時應盡量避免共振頻率。
諧響應分析的共振頻率和模態(tài)分析的共振頻率很接近,說明諧響應的共振頻率存在于模態(tài)分析的固有頻率之中。
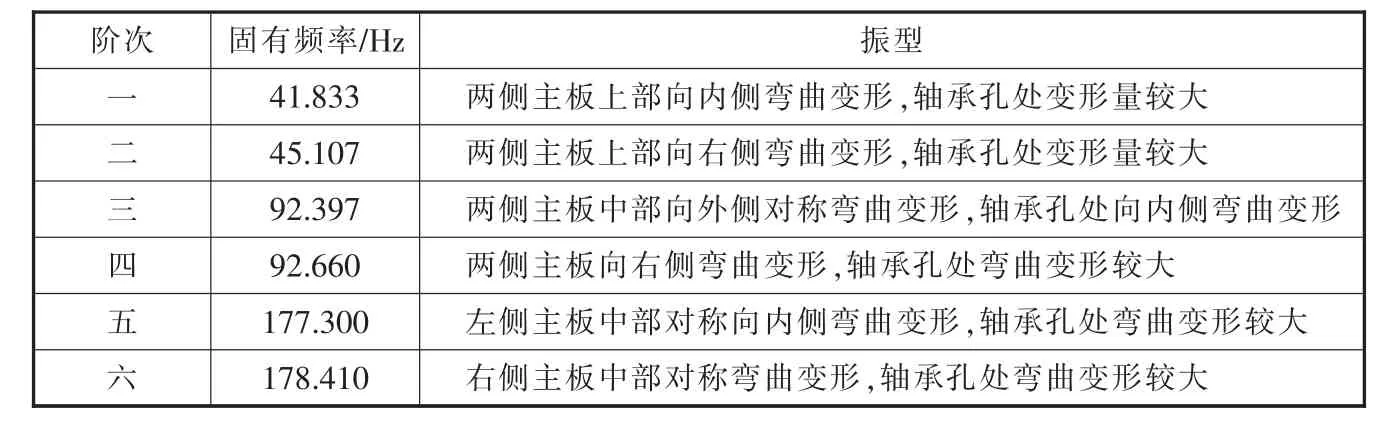
表1 回轉支架前六階固有頻率和振型

▲圖2 回轉支架前六階振型
4 結論
應用ANSYS Workbench軟件對機械手回轉支架進行靜力學分析、模態(tài)分析和諧響應分析,比較其固有頻率、模態(tài)特性和影響因素。
通過對機械手回轉支架的靜力學分析,可知最大應力為0.435 66 MPa,遠小于選取材料的許用應力,最大變形量為0.002 mm,在設計誤差允許的范圍內(nèi),符合機械手的設計要求。
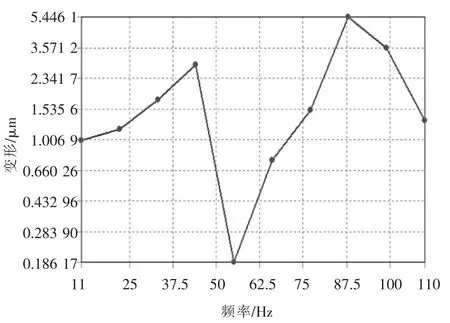
▲圖3 回轉支架頂部變形與頻率關系曲線
通過對機械手回轉支架的模態(tài)分析,發(fā)現(xiàn)回轉支架兩相鄰的固有頻率之間的頻率差值較小,且在第三、第四階固有頻率處易發(fā)生共振現(xiàn)象。在設計機械手時,調(diào)整伺服電機的轉速和機械手的回轉行程,使回轉支架的固有頻率遠離共振頻率,可以有效避免發(fā)生共振,為機械手伺服電機選取和外部激勵載荷調(diào)節(jié)提供了理論依據(jù)。
通過對機械手回轉支架的諧響應分析,得到回轉支架在不同激振頻率動載荷作用下,發(fā)生共振的頻率、振幅和方向,以及振幅變化最大的結構位置,為后期機械手的設計優(yōu)化提供理論支持。
猜你喜歡
保健醫(yī)苑(2022年5期)2022-06-10 07:46:12
小哥白尼(趣味科學)(2021年8期)2021-11-20 06:08:04
模具制造(2019年3期)2019-06-06 02:10:54
湖北經(jīng)濟學院學報·人文社科版(2015年8期)2015-12-29 05:53:07
上海電機學院學報(2015年4期)2015-02-28 14:30:00
機械工程師(2015年10期)2015-02-02 01:14:03
計算物理(2014年2期)2014-03-11 17:01:39
機電產(chǎn)品開發(fā)與創(chuàng)新(2014年4期)2014-03-11 16:42:24
航天器工程(2014年5期)2014-03-11 16:35:55
上海金屬(2013年4期)2013-12-20 07:57:18
