基于ROBO.TXT控制的全方位氣動水果采摘機(jī)設(shè)計(jì)
2018-10-11 01:30:30李月寒吳何畏史志慧
機(jī)電工程技術(shù) 2018年8期
關(guān)鍵詞:按鈕設(shè)計(jì)
李月寒,吳何畏,張 武,陳 新,史志慧
(湖北文理學(xué)院機(jī)械與汽車工程學(xué)院,湖北襄陽 441000)
0 前言
傳統(tǒng)人工采摘水果作業(yè)難度大、采摘效率低,生產(chǎn)力不能適應(yīng)生產(chǎn)關(guān)系的發(fā)展。目前多數(shù)采摘裝置以自動化技術(shù)和計(jì)算機(jī)技術(shù)為主體、有機(jī)融合各種現(xiàn)代信息技術(shù)的系統(tǒng)集成和應(yīng)用,存在成本造價(jià)昂貴、后期機(jī)器維護(hù)繁瑣、采摘與運(yùn)輸不相結(jié)合等缺點(diǎn)[1]。本文介紹了以ROBO.TXT為主控的全方位水果采摘機(jī),該設(shè)計(jì)使用ROBO.TXT控制器、氣動元件、機(jī)械結(jié)構(gòu)組成,實(shí)現(xiàn)了采摘水果自動化[2]。
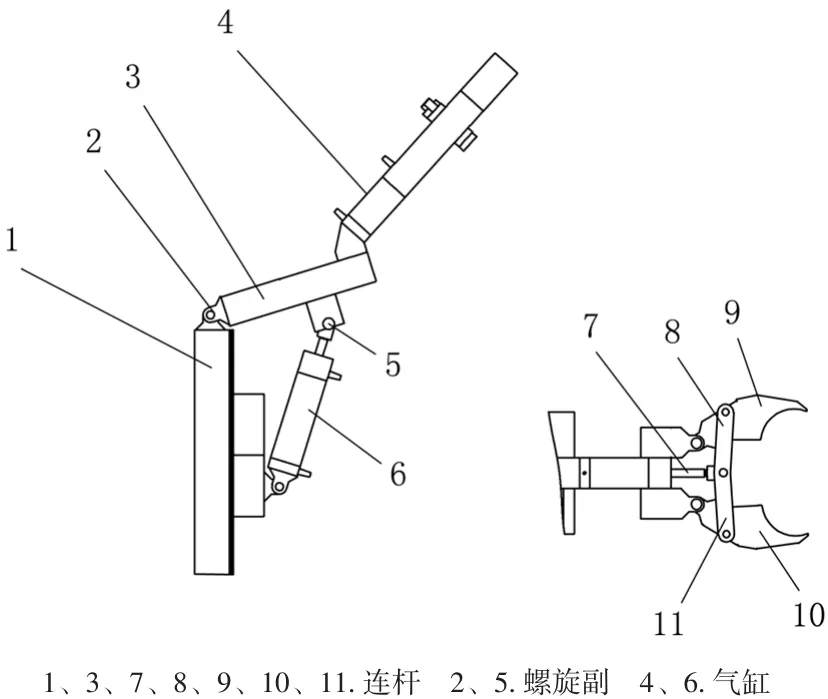
圖1 采摘水果機(jī)結(jié)構(gòu)示意圖
1 氣動水果采摘機(jī)系統(tǒng)組成和工作原理
氣動水果采摘機(jī)械手由雙氣缸、連桿機(jī)構(gòu)、螺旋副組成,連桿、氣缸具有成本較低、重量輕的特點(diǎn)。該設(shè)計(jì)減少果農(nóng)的經(jīng)濟(jì)負(fù)擔(dān)和勞動負(fù)擔(dān),基本上實(shí)現(xiàn)了模擬果農(nóng)采摘水果的動作。圖1為采摘水果機(jī)結(jié)構(gòu)示意圖[3],6為雙氣缸帶動采摘機(jī)升降,4為單氣缸帶動7、8、9連桿控制采摘機(jī)夾緊水果。
整個(gè)執(zhí)行機(jī)構(gòu)安裝在蝸輪蝸桿上,實(shí)現(xiàn)360°旋轉(zhuǎn),一個(gè)工作節(jié)拍可以完成對周圍的水果采摘;整體結(jié)構(gòu)包括一個(gè)單氣缸和連桿機(jī)構(gòu)組成的夾取裝置、雙氣缸傳遞上升下降運(yùn)動及蝸輪蝸桿傳遞旋轉(zhuǎn)運(yùn)動實(shí)現(xiàn)全方位采摘的裝置,圖2為FLUIDSIM回路仿真[4]。氣動傳動結(jié)構(gòu)主要包括氣缸、電磁閥、氣泵、換向閥。氣缸1、2出氣口有調(diào)速閥,起背壓、調(diào)速作用,機(jī)械手加載過程中減小下降速度[5]。氣缸3出氣口連接減壓閥,起減壓作用,減小機(jī)械手夾緊力,防止損壞水果。三位五通電磁換向閥5、8中位機(jī)能為O型起鎖緊回路作用。

圖2 FLUIDSIM回路仿真
當(dāng)Y1得電時(shí),機(jī)械手上升,當(dāng)Y2得電時(shí),機(jī)械手下降,氣缸1、2兩缸分別作用平衡機(jī)械手上端使其穩(wěn)定,調(diào)速閥在出氣口,使開口減小,防止機(jī)械手加載過程中下降速度過快。當(dāng)Y4得電時(shí),機(jī)械手夾緊,減壓閥在出氣口進(jìn)行減壓,使得機(jī)械手夾緊力減小,防止損壞水果。當(dāng)Y3得電時(shí),機(jī)械手松開。
2 氣動水果采摘機(jī)程序設(shè)計(jì)[6]
2.1 采摘機(jī)主程序設(shè)計(jì)
在程序控制設(shè)計(jì)方面,使用的是慧魚ROBOPRO軟件,以ROBO.TXT為主控制器,通過ROBOPRO控制軟件和接口板把計(jì)算機(jī)和模型相連,通過程序的設(shè)計(jì)并進(jìn)行調(diào)試解決問題。該設(shè)計(jì)特色在于使用了一種全新的程序編輯方式——用各種程式模塊來代替編程語言,通過流程圖和數(shù)字流程圖的結(jié)合可以生成圖形化將機(jī)械手的運(yùn)動流程設(shè)計(jì)好,再配合所需要的各種程式模塊,將其內(nèi)部的數(shù)據(jù)設(shè)定好即可實(shí)現(xiàn)機(jī)械手的運(yùn)行[7]。該控制系統(tǒng)設(shè)計(jì)由小車驅(qū)動程序、采摘機(jī)械手旋轉(zhuǎn)程序、采摘機(jī)械手平移程序、采摘機(jī)械手夾具剪切程序與程序控制界面組成。如圖3所示為主程序圖,由機(jī)械手移動、機(jī)械手夾具運(yùn)動、蝸桿旋轉(zhuǎn)、小車移動4個(gè)主程序組成,采用了多進(jìn)程設(shè)計(jì)思想。當(dāng)外部按鈕按下時(shí),外部的按鈕信號輸入主程序模塊內(nèi),主程序調(diào)用子程序,使電機(jī)運(yùn)動或停止,當(dāng)執(zhí)行完成子程序時(shí),程序返回到主程序繼續(xù)等待下一個(gè)按鈕信號。

圖3 采摘機(jī)主程序
2.2 行走子程序設(shè)計(jì)
為實(shí)現(xiàn)采摘機(jī)構(gòu)的行走功能,設(shè)計(jì)了行走子程序。圖4所示為小車移動子程序,帶動小車運(yùn)行的電機(jī)啟動為上升沿觸發(fā),按下控制界面里的“車啟動”按鈕,子程序接收到上升沿的信號,電機(jī)帶動車輪運(yùn)動。電機(jī)關(guān)閉為下降沿觸發(fā),按下控制界面里的“車關(guān)閉”按鈕,電機(jī)關(guān)閉車輪停止運(yùn)動。
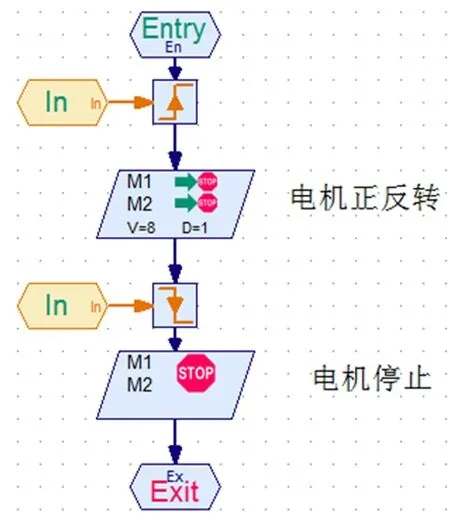
圖4 小車行走子程序
2.3 觸摸屏面板設(shè)計(jì)
圖5 為采摘機(jī)觸摸屏面板,點(diǎn)擊對應(yīng)按鈕,采摘機(jī)便可以執(zhí)行相應(yīng)的操作,按鈕的含義如圖5所示。

圖5 采摘機(jī)觸摸屏面板
“順時(shí)針旋轉(zhuǎn)”、“逆時(shí)針旋轉(zhuǎn)”表示電機(jī)帶動蝸桿,蝸輪進(jìn)行順時(shí)針逆時(shí)針旋轉(zhuǎn),旋轉(zhuǎn)停止表示控制蝸輪旋轉(zhuǎn)停止。
“前移”、“后移”表示機(jī)械手與機(jī)械手支撐桿在齒條前后移動,上升、下降表示支撐桿單獨(dú)在齒條前后移動及螺旋副的旋轉(zhuǎn)支撐機(jī)械手夾具上下運(yùn)動。
“夾具上升”、“夾具下降”表示電磁閥開閉控制氣缸的往返運(yùn)動及螺旋副的旋轉(zhuǎn),帶動機(jī)械手夾具的開閉合。
“夾剪水果”、“松開水果”表示電磁閥開閉控制氣缸的往返運(yùn)動,帶動機(jī)械手夾具的開閉合。
3 結(jié)束語
以ROBO.TXT為主控制器,控制機(jī)械結(jié)構(gòu)與氣動元件。采用氣動組件、齒輪齒條組件、蝸輪蝸桿組件搭建采摘機(jī)構(gòu),由Fluidsim對氣動回路的正確進(jìn)行分析。該設(shè)計(jì)實(shí)現(xiàn)了自動化,減輕果農(nóng)的勞動負(fù)擔(dān)。
猜你喜歡
兒童故事畫報(bào)·發(fā)現(xiàn)號趣味百科(2025年8期)2025-08-23 00:00:00
青少年科技創(chuàng)新報(bào)(2024年23期)2024-07-12 00:00:00
中學(xué)生天地(A版)(2022年10期)2022-11-23 06:42:50
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
少年文藝·我愛寫作文(2017年6期)2017-06-12 23:21:56
Coco薇(2017年5期)2017-06-05 08:53:16
商業(yè)評論(2014年9期)2015-02-28 04:32:41
