基于飛行數據反演解算的SINS空中標定技術
2018-10-12 05:08:54戴邵武聶子健戴洪德陳強強
海軍航空大學學報 2018年4期
戴邵武,聶子健,戴洪德,陳強強
(海軍航空大學,山東煙臺264001)
隨著捷聯式慣導系統(Strapdown Inertial Navigation System,SINS)相較于平臺式慣導系統在體積、成本及可靠性等方面的優勢日益突顯。目前,我國主戰飛機的慣導系統逐漸由SINS所取代。然而,SINS直接“捆綁”在機體上,易受到各種外部環境的干擾,且隨著工作時間的延長,導航性能將會下降,可能無法滿足飛機的導航精度要求。因此,需要對SINS進行標定,以補償相應的誤差項。
我國對SINS的標定主要是基于實驗室的定期拆卸標定[1],這種標定方法繁瑣復雜,須要借助轉臺等專業測試設備才能完成對SINS的標定,不便于使用與維護。
為改進SINS的標定方法,國內外許多學者開始研究免拆卸標定方法[2-6]。陸志東等提出GPS/SINS組合導航系統空中系統級標定方法,通過設計飛機的機動動作,以激勵SINS中的誤差項,在一個飛行架次結束后即可完成對SINS誤差的標定[7]。楊功流等提出一種彈載SINS/CNS組合導航系統免拆卸標定方法,將星敏感器安裝誤差擴充到系統狀態向量中,設計導彈運動軌跡,對該標定方法進行了仿真驗證,取得了較好的標定精度[8]。彭慧等針對高超聲速飛行器進行了基于Kalman濾波的慣性器件誤差標定,成功標定出標度因數誤差與安裝誤差[9]。然而,這些標定方法均通過正向導航解算實現對SINS的標定。
本文基于GPS/SINS組合導航仿真輸出的飛行數據進行反演解算,以得到慣性器件的輸出增量,并結合系統級空中標定原理對機載SINS中的誤差項進行標定。
1 SINS正向導航解算
1.1 SINS微分方程組
SINS微分方程組中用到的坐標系有:i為慣性坐標系;e為地球坐標系;n為導航坐標系(E-N-U);b為機體坐標系(右-前-上)。它由姿態、速度和位置微分方程組成,即[10]:
1.2 SINS導航參數更新
SINS導航參數的更新即指對姿態、速度和位置信息進行更新。
設導航參數更新周期為Tm,運用“單子樣+前一周期”算法對慣性器件輸出增量進行補償[11-13]。下面分別給出各導航參數的更新過程。
1.2.1 姿態更新
由矩陣鏈式法則:


式(3)中:Δθm-1、Δθm分別為陀螺儀在Tm-1與Tm內的角增量。

1.2.2 速度更新與位置更新
根據tm-1時刻的速度,可得出tm時刻的速度:


式(6)中:Δvrot,m對速度旋轉誤差進行補償;Δvscull,m對劃槳誤差進行補償。
式(7)~(8)中,Δvm-1、Δvm分別為加速度計在Tm-1與Tm內的速度增量。
基于速度更新,可以根據tm-1時刻的位置pm-1解算出tm時刻的位置為:

式中,Mpv(m-1/2)為tm-1/2時刻的線性外推計算值。
2 SINS反演解算
反演算法可視為SINS導航參數更新的逆過程。該算法只需根據載體的GPS/SINS組合導航輸出的姿態角和位置信息,即可以實現對慣性器件輸出值的仿真[14-15]。
2.1 姿態角和位置序列擬合
運用Matlab現有的spline函數即可對姿態角和位置序列擬合。對緯度序列Lm在[tm-1,tm]內進行3次樣條函數擬合,可得:

式中,dm0、dm1、dm2、dm3為緯度擬合系數。
由緯度L與SINS的北向速度之間的關系:

式中,RM,h=RM+h,取L與RM,h為Tm中間時刻tm-1/2的值。
同理,根據經度λ與東向速度、高度h與天向速度之間的關系,可得到:

式(13)中,cm1、cm2、cm3與gm1、gm2、gm3分別為經度和高度擬合系數。
由式(10)~(13)即可得到位置函數P(t)和速度函數vn(t),同理,對姿態角進行三次樣條函數擬合,可得對應的擬合函數為A(t),此處不再贅述。
2.2 慣性器件輸出增量仿真
以Tk=tk-tk-1為SINS反演解算周期,對姿態角擬合函數A(t)和速度擬合函數vn(t)插值可得對應序列Ak和。
由式(2)變形得:
由于已知姿態序列Ak,即已知。可根據旋轉矢量解出,其中的可根據p(t)和vn(t)插值解出。再將代入式(4)可解算出旋轉矢量Φk,然后將Φk代入式(4)可逆向解算出陀螺儀的角增量輸出值:

由式(5)變形得:

將式(16)進行整理,得:

式(15)和(17)即為慣性器件輸出增量的仿真值。一般地,反演解算初始化設置Δθ0=0,Δv0=0。
3 SINS空中標定方案設計
3.1 標定整體思路
SINS空中標定流程見圖1。具體流程為:首先,將組合導航仿真輸出的姿態角、位置數據進行反演解算,以得到慣性器件的仿真輸出值;然后,利用引入誤差后的慣性器件輸出值作為SINS的輸入并進行導航解算,并以GPS和SINS輸出的誤差為觀測量;最后,運用Kalman濾波對慣性器件誤差進行系統級標定。

圖1 系統級空中標定流程圖Fig.1 System-level in-flight calibration flow chart
3.2 Kalman濾波器設計
3.2.1 狀態方程設計
在一個標定周期內,若不進行拆裝,可認為SINS的安裝誤差不發生變化[16]。以SINS的姿態誤差、速度誤差、位置誤差及慣性器件的常值誤差和標度因數誤差作為狀態向量,可得1個21維的狀態方程:

式(18)中:X(t)=[φEφNφUδvEδvNδvUδL δλδh εb,x εb,yεb,z?a,x?a,y?a,zδKa,xδKa,yδKa,zδKg,xδKg,yδKg,z]T,其中,εb=[εb,xεb,yεb,z]T為陀螺儀的常值漂移,?a=[?a,x?a,y?a,z]T為加速度計的零偏誤差,δKg=[δKg,xδKg,yδKg,z]T為陀螺儀標度因數誤差,δKa=[δKa,xδKa,yδKa,z]T為加速度計標度因數誤差;F21×21(t)為21維的系統矩陣;W(t)=[wg,xwg,ywg,zwa,xwa,ywa,z]T為3個軸向的陀螺儀與加速度計隨機噪聲;G(t)為噪聲驅動陣。
將F(t)分為4大塊,即:

式(19)中:FN(9×9)為 SINS 誤差狀態矩陣;矩陣FN、FM、FS中的具體參數可根據文獻[17]中的SINS誤差模型,去掉安裝誤差后獲得。
3.2.2 量測方程設計
以GPS和SINS輸出的誤差為觀測量,可得:

式(20)中:Z(t)為量測向量;H為量測矩陣;V(t)為觀測噪聲。
觀測量的選取決定觀測矩陣和觀測噪聲的形式,本文以速度誤差為觀測量[18],則:

對應的觀測矩陣為:

4 飛行數據處理與標定仿真分析
已知SINS的3個陀螺常值漂移均為0.01(°)/h,加速度計零偏誤差均為100 μg,陀螺儀與加速度計的標度因數誤差均為100×10-6。原始飛行數據輸出頻率為1Hz,首先,通過對其進行擬合、插值,獲得輸出頻率為100Hz的姿態序列Ak、位置序列Pk和速度序列;然后,利用這些數據序列進行SINS反演解算,以得到慣性器件輸出增量信息,如圖2、3所示。
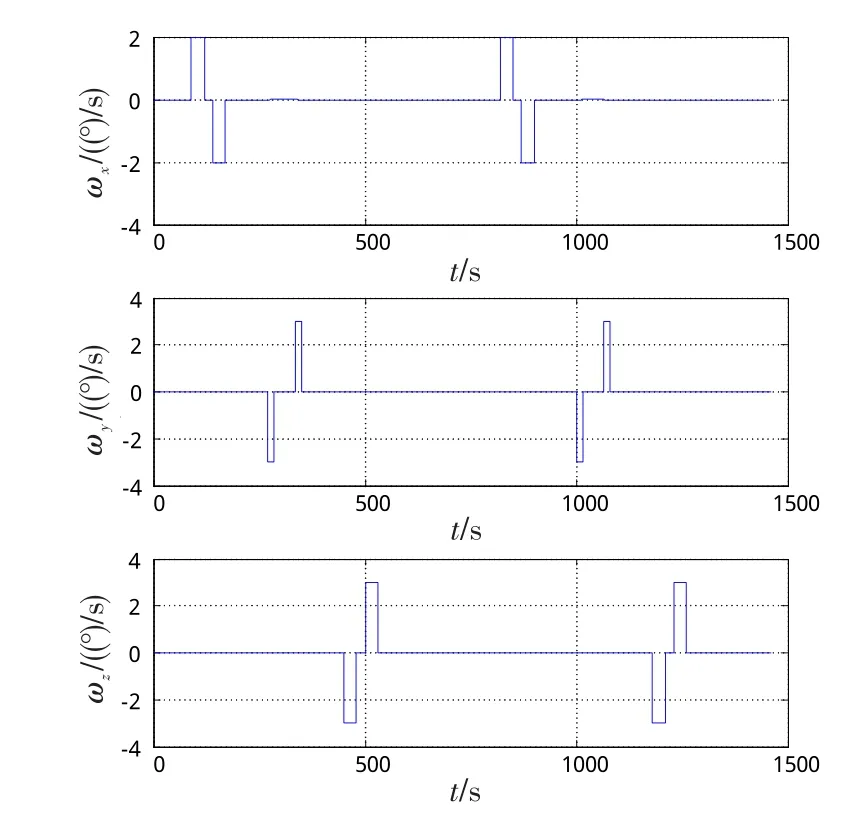
圖2 陀螺儀反演輸出值Fig.2 Gyro inversion output values
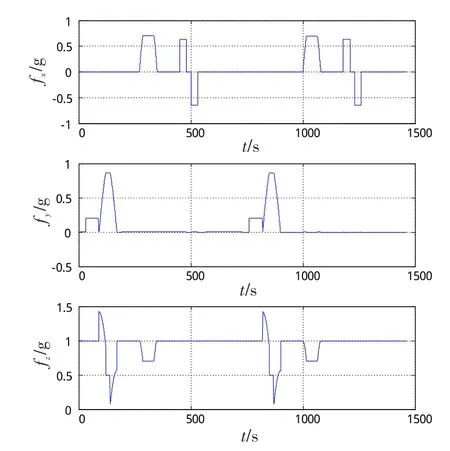
圖3 加速度計反演輸出值Fig.3 Accelerometer inversion output values
對反演解算得到的慣性器件輸出增量引入誤差后進行純慣導解算,并以GPS和SINS輸出的速度誤差為觀測量,對SINS中的陀螺儀、加速度計的常值誤差和標度因數誤差進行標定,得到的標定結果如圖4~圖7所示。
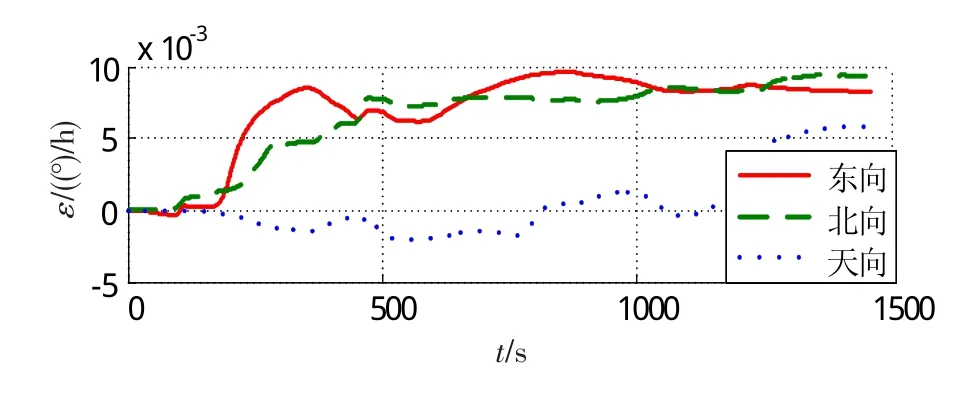
圖4 陀螺儀常值漂移估計曲線Fig.4 Gyro constant bias estimation curves
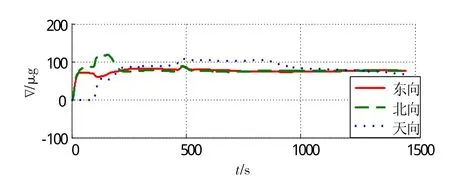
圖5 加速度計零偏估計Fig.5 Accelerometer constant bias estimation
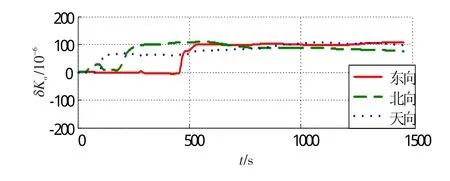
圖6 加速度計標度因數誤差估計Fig.6 Accelerometer scale factor error estimation
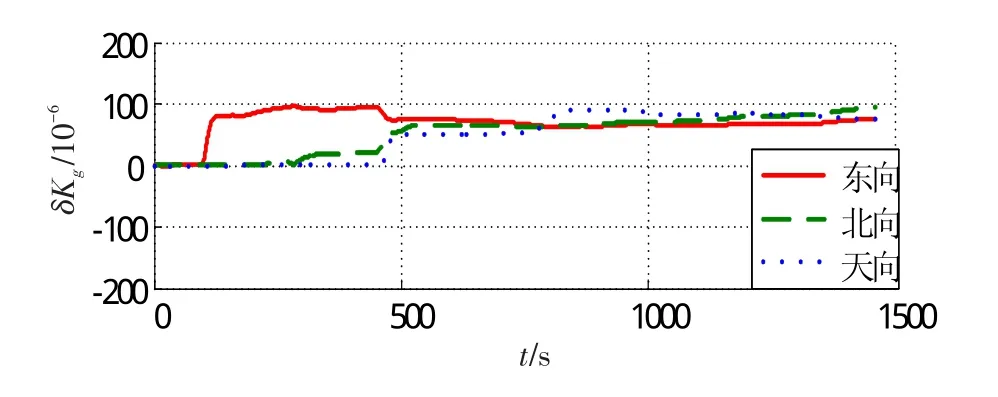
圖7 陀螺儀標度因數誤差估計Fig.7 Gyro scale factor error estimation
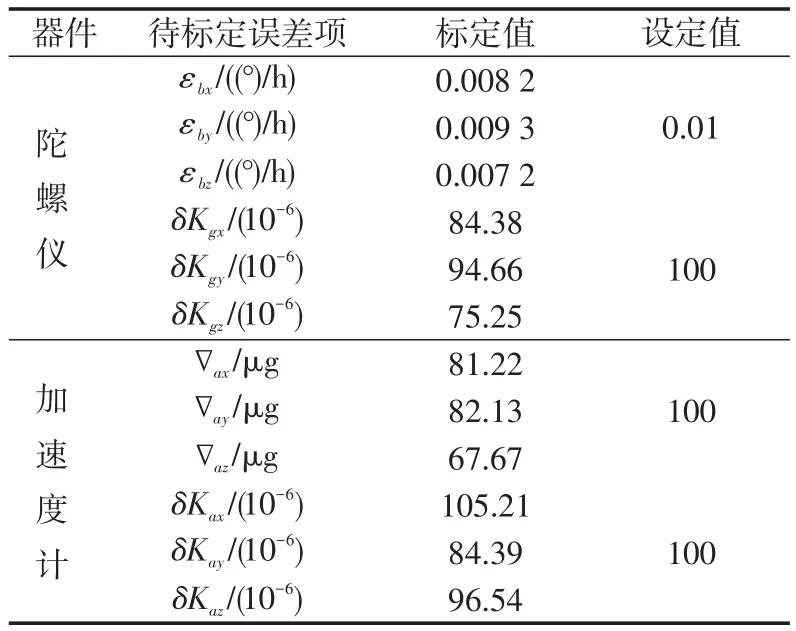
表1 以速度誤差為觀測量的標定結果Tab.1 Calibration results with observation of velocity errors
由圖4~7可知,待標定的誤差參數均能收斂到穩定值。以速度誤差作為觀測量時,估計天向陀螺常值漂移εb,z所用的時間最長,且估計效果較差,而其余方向的陀螺和加速度計對應的常值誤差、標度因數誤差均能被估計出來,具體標定結果如表1所示。
將表1的標定值與設定值對比,東向和北向陀螺常值漂移的估計精度優于0.002(°)/h,東向和北向加速度計零偏的估計精度優于20 μg,天向陀螺的標度因數誤差估計精度較差,其余方向的陀螺、加速度計對應的標度因數誤差估計精度均優于20×10-6。在SINS進行解算時,將慣性器件的輸出值減去對應的誤差估計值,即可提高SINS的導航精度。
5 結論
本文提出了一種基于飛行數據反演解算的機載SINS空中標定方法。首先,利用飛行數據反演解算得出陀螺儀和加速度計輸出增量并進行純慣導解算;然后,以速度誤差為觀測量,設計對應的Kalman濾波器,完成了對慣性器件誤差項的估計,為機載SINS的空中標定提供了一種新途徑。仿真結果表明,該標定方法可以對慣性器件的常值誤差和標度因數誤差進行標定,實現了SINS的免拆卸標定。同時,仿真結果也驗證了該方法的可行性,應用于實際中可有效提升機載SINS的作戰效能。
