室內(nèi)移動機(jī)器人人機(jī)交互的語義實現(xiàn)*
2018-10-12 02:19:56王恒升
計算機(jī)與生活 2018年10期
王恒升,任 晉
1.中南大學(xué) 機(jī)電工程學(xué)院,長沙 410083
2.中南大學(xué) 高性能復(fù)雜制造國家重點實驗室,長沙 410083
1 引言
對移動機(jī)器人進(jìn)行遠(yuǎn)程控制是很多場合的不二選擇。例如月球或火星探測車,用于災(zāi)害或危險場合的探測、作業(yè)或救援機(jī)器人等。對機(jī)器人進(jìn)行遠(yuǎn)程操作的研究與實踐很早就出現(xiàn)了,例如在美國三厘島核電站發(fā)生核事故后,就使用了一臺遠(yuǎn)程操作的機(jī)器人,操作人員在無核區(qū),通過鉛化玻璃,操作處于有核區(qū)的一臺機(jī)器進(jìn)行核事故處理[1]。
文獻(xiàn)[2]提出一種通過自然語言進(jìn)行遠(yuǎn)程人機(jī)交互的方案,即操作人員通過自然語言發(fā)出指令,機(jī)器人在遠(yuǎn)程執(zhí)行指令要求的動作。這種自然的、類似人與人之間的交互方式不(或者很少)需要對操作人員進(jìn)行專門訓(xùn)練。用于救災(zāi)機(jī)器人的交互時,方便領(lǐng)域?qū)<抑苯訉C(jī)器人發(fā)出緊急作業(yè)指令;用于服務(wù)機(jī)器人的交互時,更容易為普通用戶所接受。
正如人與人之間進(jìn)行語言交流時,人們對交流中所用的語言術(shù)語有著基本的共識,這是相互理解的基礎(chǔ)。與機(jī)器人進(jìn)行自然語言交互時,也需要對語義進(jìn)行定義。目前語義網(wǎng)的研究對概念的語義定義采用本體(Ontology)的方式[3-8],即定義概念的類結(jié)構(gòu)及相互關(guān)系,實現(xiàn)知識的表達(dá)與知識的檢索獲取。本文的研究目標(biāo)是對機(jī)器人基于自然語言進(jìn)行導(dǎo)航控制,要控制的機(jī)器人處于建筑物內(nèi)部。因此導(dǎo)航用語中有大量的建筑物內(nèi)部的地名詞,例如“走到601房門口”,“在A座4樓電梯口往左拐”等,這里的“601房”、“A座”、“4樓電梯”等均是與某建筑相關(guān)聯(lián)的地名詞。本文借用本體的方法建立建筑物內(nèi)部的地名詞的概念體系,在此基礎(chǔ)上建立建筑物的語義地圖。
本文所說的語義地圖,其實質(zhì)是基于本體的對建筑物內(nèi)部地名詞的描述,更進(jìn)一步說,是對建筑物空間知識的一種表達(dá),或者說是關(guān)于建筑物內(nèi)部空間的數(shù)據(jù)庫。本文采用Prolog語言[9-11],將地名詞描述為Horn Clause事實,其中包括名字信息、空間坐標(biāo)信息等。從這些事實庫中可以得到建筑物內(nèi)部空間的拓?fù)溥B接關(guān)系(即拓?fù)涞貓D)供機(jī)器人進(jìn)行路徑規(guī)劃等,也能畫出建筑內(nèi)部空間簡要的平面圖供操作者參考。這樣定義的地名詞與人對這些名詞的理解是一致的,也就是具有相同的“語義”;同時能夠方便獲得所需要的“地圖”,本文稱為語義地圖。
語義地圖是一種基于語義表達(dá)環(huán)境地理信息的一種方法,屬于知識表達(dá)的范疇,在機(jī)器人人工智能領(lǐng)域有廣泛的研究及應(yīng)用預(yù)期。Zender等人[12]首先提出并實現(xiàn)了層級式的空間表達(dá)模型,應(yīng)用于典型的室內(nèi)辦公環(huán)境,在尺度地圖、導(dǎo)航地圖、拓?fù)涞貓D的基礎(chǔ)上,通過激光、相機(jī)的傳感信息來識別物體,借助自然語言處理,抽取出概念地圖,以基于描述邏輯的本體語言的形式儲存。Crespo等人[13]提出了一種語義關(guān)系模型,機(jī)器人通過人機(jī)對話系統(tǒng)完成室內(nèi)環(huán)境下的高層導(dǎo)航任務(wù),語義概念的相似性適應(yīng)于不同環(huán)境。Tenorth等人[14]提出了一種處理知識的服務(wù)框架KnowRob,使用prolog語言,將模糊的任務(wù)描述與任務(wù)操作所需詳細(xì)信息聯(lián)系起來;其合作者Beetz等人[15]在此基礎(chǔ)上,開發(fā)出一套功能更為完善的知識處理服務(wù)平臺Open-EASE,可實時獲取機(jī)器人的操作片段,并可以詢問到機(jī)器人所觀察和推理的信息,例如完成任務(wù)的方式、原因以及相關(guān)行為引發(fā)的后果。Drouilly等[16]和Landsiedel等[17]對室外更為復(fù)雜的語義地圖進(jìn)行了探索,描述了街道地圖。本文的關(guān)注點在于室內(nèi)環(huán)境的語義地圖構(gòu)建,主要目的是為移動機(jī)器人能夠應(yīng)用于室內(nèi)環(huán)境、與人通過自然語言的方式進(jìn)行交互。出發(fā)點是將建筑物環(huán)境信息作為先驗知識和推理的基礎(chǔ),服務(wù)于人機(jī)交互;進(jìn)一步基于傳感器數(shù)據(jù)對室內(nèi)空間和物體進(jìn)行辨識,補(bǔ)充語義地圖的動態(tài)信息,不在本文范圍。
本文后面的內(nèi)容安排如下:第2章以某實際大樓為例,介紹語義地圖的構(gòu)建;第3章利用“事實-規(guī)則-推理”的邏輯編程方法,在語義地圖事實庫的基礎(chǔ)上,實現(xiàn)機(jī)器人自定位的邏輯程序設(shè)計;第4章通過邏輯編程實現(xiàn)機(jī)器人的自定位算法。
2 構(gòu)建語義地圖
2.1 建筑物簡介
以中南大學(xué)機(jī)電工程學(xué)院大樓為例構(gòu)建語義地圖。該大樓是一個集辦公、教學(xué)和實驗于一體的綜合建筑,以下簡稱CMEE,圖1為其第四層平面圖。CMEE包含4棟建筑,圖1由左到右分別為A、B、C和D棟。這4棟建筑每層均由橋式走廊連通。A棟為辦公區(qū),共有6層。其他3棟為實驗和教學(xué)區(qū),共有5層,圖2示出各樓棟樓層的高度(虛線框代表樓棟,粗實線代表樓棟各層的連接通道)。CMEE相對較為復(fù)雜,在樓層、建筑群、連接通道、室內(nèi)功能空間等方面具有多樣性和代表性,涉及語義豐富,對醫(yī)院、商場、寫字樓等類型的建筑均可有相似的語義表達(dá),因此具有一定的代表性和可移植性。
2.2 建立本體
首先考慮描述建筑物空間的最小單元(基元),選擇區(qū)域和節(jié)點兩類最小單元。

Fig.1 Fourth floor of CMEE圖1 CMEE第四層平面示意圖

Fig.2 Diagram of floors height of CMEE圖2 CMEE高度方向示意圖
區(qū)域是指由墻壁分割開的空間,包括房間(使用空間)和交通空間[18]。交通空間分為水平交通空間和垂直交通空間。水平交通空間又分為樓道(樓棟內(nèi)部通道)、橋式通道(連接樓棟與樓棟的通道)和臺階(連接室內(nèi)局部高差)。垂直交通空間又分為樓梯間和電梯間。
節(jié)點指的是區(qū)域之間的連接點,例如房間的門就是房間區(qū)域與樓道區(qū)域的連接點,再如一個十字路口的交叉點也是一個節(jié)點(即兩個或多個樓道的連接點,有時存在一個實際的防火門)。將節(jié)點定義為一個實體是方便建立區(qū)域之間的連接關(guān)系。
CMEE的概念本體如圖3所示,從不同的視角進(jìn)行分類,最終落實到最小的單元實體,即區(qū)域和節(jié)點。最小的單元實體可按不同的角度歸屬不同的類。例如一個房間a513,根據(jù)用途可歸到辦公室類,根據(jù)所處的樓層可歸到5樓,根據(jù)所在的樓棟可歸到A棟。

Fig.3 Ontology of CMEE圖3 CMEE的概念本體
對最小單元實體按照日常用語習(xí)慣進(jìn)行命名。例如房間編號“a601”,可以清楚看出該房間是位于A座6樓的01號房間。模仿房間命名格式,可以對具體的每一個樓道和臺階個體進(jìn)行編號,如“a6c1”代表A座6樓,后面的字母c代表其區(qū)域類型為樓道(corridor),最后的數(shù)字1是該樓道的具體編號;對節(jié)點的命名也一樣,如“a601d1”,代表a601房間的第一個門口(其中d代表門);再如“a6p02”,代表a座6樓的第二個交叉路口(其中p表示樓道連接的虛擬節(jié)點)。需要注意的是,建筑物內(nèi)還存在若干區(qū)域無法用上述規(guī)則準(zhǔn)確命名,如橋式走廊和樓梯間等,分別連接著相鄰的樓棟與樓層。類似前文用單個字母的表達(dá)形式無法充分表明其真實的連接關(guān)系,因此引入雙字符以準(zhǔn)確命名。如區(qū)域“p4cd6”,其中,第一位字母p代表區(qū)域類型為橋式走廊(passage),第二位數(shù)字4代表位于4層,第三、四位代表連接C棟和D棟,第五位數(shù)字是該區(qū)域的具體編號。類似地,“s45a1”代表位于A棟、連接4層和5層的1號樓梯間(stairwell)區(qū)域;“e5a1”代表位于A棟5層的1號電梯(elevator)。其中,當(dāng)樓梯間(或電梯)與各層區(qū)域連接的節(jié)點位于橋式走廊上,即處于樓棟與樓棟之間時,借助不同編號定義的橋式走廊,如圖1所示的①~⑥,采用單個字母p(區(qū)別于a、b、c、d),配合對應(yīng)橋式走廊的唯一編號準(zhǔn)確定義。
2.3 語義地圖描述
選用Prolog語言[9-11]進(jìn)行語義地圖的描述。Prolog是一種基于一階謂詞邏輯的描述型邏輯編程語言,是最早出現(xiàn)的邏輯編程語言之一,1972年在法國馬賽由Colmerauer和Philippe Roussel共同開發(fā),最早用于自然語言處理;迄今Prolog仍是應(yīng)用最廣的邏輯編程語言,有免費的和商用的多個版本,廣泛應(yīng)用于機(jī)器證明、專家系統(tǒng)等需要知識表達(dá)與邏輯推理的場合。隨著新技術(shù)和新思想的出現(xiàn),在Prolog的基礎(chǔ)上擴(kuò)充了許多功能,如約束邏輯編程(constrained logic programming,CLP)、面向?qū)ο筮壿嬀幊蹋╫bjectoriented logic programming,OOLP)、回答集編程(answer setprogramming,ASP)等,擴(kuò)展了對語義網(wǎng)支持的Prolog形成了RDF、OWL描述語言。各種版本及擴(kuò)展的邏輯編程語言,其基本描述方式和語法表達(dá)都是基于Prolog的。為閱讀方便,本文的示例均以Prolog的語法給出,并在免費平臺SWI-Prolog上調(diào)試通過。
用Prolog對CMEE的每個單元實體進(jìn)行定義,就構(gòu)成了語義地圖的事實(facts)數(shù)據(jù)庫,這樣可以實現(xiàn)定義的完備性并避免重復(fù)定義。每一個單元實體事實包含兩項基本內(nèi)容:名字和坐標(biāo)。根據(jù)Prolog的規(guī)范,小寫字母開頭的表示常量,描述事實的語句中所有量均為常量;大寫字母開頭的表示變量,在實現(xiàn)推理的謂詞設(shè)計中,所有量均為需要綁定的變量。本文涉及Prolog程序的敘述均沿用這個慣例。本文的所有程序均在SWI-Prolog中調(diào)試通過。
例如一個區(qū)域?qū)嶓wa603的定義為:
area(a603,[coor(122660,110342,19600),coor(121859,112391,19600),coor(126610,114247,19600),coor(127920,110893,19600),coor(123169,109038,19600),coor(123024,109411,19600)])
其中第一項為區(qū)域的名稱,后面的一個列表就是該區(qū)域的多邊形頂點坐標(biāo)序列。
再如節(jié)點實體a603d1的定義為:node(a603d1,coor(122842,109876,19600))。
其中定義式中的coor(122842,109876,19600)表示一個點的三維坐標(biāo),Prolog可以很方便實現(xiàn)這種自定義數(shù)據(jù)類型。
3 語義地圖應(yīng)用
有了基本的語義地圖數(shù)據(jù)庫,可以在Prolog的框架下設(shè)計各種謂詞,實現(xiàn)不同的推理需求。
3.1 生成拓?fù)涞貓D
拓?fù)涞貓D從高一層次上反映了區(qū)域之間的連接關(guān)系,是實現(xiàn)最短路徑規(guī)劃的基礎(chǔ)。生成拓?fù)涞貓D的基礎(chǔ)是建立區(qū)域和節(jié)點之間的連接關(guān)系。通過下面的謂詞connect/4進(jìn)行推理,可找到直接相連接的兩個區(qū)域Area1和Area2。

謂詞中的參數(shù)Node是連通兩個區(qū)域的節(jié)點,Dis為兩個區(qū)域之間的距離。這個推理描述的邏輯為:“如果節(jié)點Node既在區(qū)域Area1內(nèi),又在區(qū)域Area2內(nèi),且Area1和Area2不同,那么這兩個區(qū)域通過該節(jié)點直接相連”。Prolog是一種描述性語言,其謂詞設(shè)計的基本思想是按約束滿足問題(constraint satisfaction problem,CSP)的思路將問題描述出來。例如上面的謂詞connect(Area1,Area2,Node,Dis)就是尋找同時滿足in_area(Node,Area1)(即Node在區(qū)域Area1中)、in_area(Node,Area2)(即Node在區(qū)域Area2中)和not(Area1==Area2)(即這兩個區(qū)域不同)3個條件的變量Area1、Area2和Node;最后一個條件area_distance()不需要搜索,只是完成一個計算過程,即計算通過節(jié)點Node相連的兩個區(qū)域Area1和Area2之間的距離。問題的求解是由Prolog來完成的。設(shè)計者的主要任務(wù)只是描述問題而不是像其他程序設(shè)計語言那樣給出具體的求解過程。
有了上面的謂詞后,可借助謂詞save_fact/0,由CMEE的基本事實庫生成一個擴(kuò)展事實庫directly_link.pl。

事實庫directly_link.pl描述了CMEE的所有區(qū)域之間的直接相連的關(guān)系,實際上就是生成一個拓?fù)涞貓D數(shù)據(jù)庫。
3.2 擴(kuò)充的概念語義
有了這些定義的基本單元實體后,可以通過基本規(guī)則來定義擴(kuò)充的概念語義,如樓棟(building)、樓層(floor)等。這些語義是日常口語中常用到的。下面給出通過區(qū)域名稱和當(dāng)前位置坐標(biāo)來判別樓棟和樓層的推理過程。
3.2.1 根據(jù)區(qū)域名稱推理
若機(jī)器人觀察到區(qū)域門牌號,或是從人機(jī)交互中獲得空間區(qū)域的名稱信息,則可以根據(jù)這些地名詞和地名詞的命名規(guī)則,推理出相應(yīng)的樓層樓棟信息。
一個名為Name的實體屬于“某棟”(Building)的基本規(guī)則可寫為:

第一個字母

一個名為Name的實體屬于“某層”(Floor)的基本規(guī)則可寫為:

中的第二個字母

3.2.2 根據(jù)當(dāng)前坐標(biāo)推理
機(jī)器人也可根據(jù)自身實時位置坐標(biāo),推理出相應(yīng)的樓層樓棟信息。下面的謂詞building_by_coor/2實現(xiàn)這一功能。

這里還用到了樓棟定義的事實,如A棟區(qū)域進(jìn)行定義如下:
building(a).%區(qū)域a是樓棟
area(a,[coor(125300,117600,_),oor(97900,117600,_),coor(97900,45798,_),coor(107365,47528,_),coor(131465,53167,_),coor(148876,57241,_),coor(140363,79037,_),coor(141760,79583,_),coor(135211,96349,_),coor(133814,95804,_)]).%A棟的區(qū)域坐標(biāo)信息
判斷位置點與多邊形關(guān)系的謂詞point_ploygon/3是這里的核心,關(guān)于這個謂詞的實現(xiàn)在后面第4章有詳述。
通過下面的謂詞floor_by_coor/2可以根據(jù)坐標(biāo)推理出所在的樓層。

該謂詞可判斷當(dāng)前位置處于A棟的各個樓層,其數(shù)據(jù)與圖2中樓層高度是統(tǒng)一的。其他樓棟的樓層謂詞也類似,這里省略以免冗長。
3.3 搜索最短路徑
路徑規(guī)劃是移動機(jī)器人完成室內(nèi)導(dǎo)航的基本任務(wù)之一。下面的謂詞path/8可找出區(qū)域Area1到區(qū)域Area2的可行路徑序列。

not(member(Area3,Pathlist1)),%保證新找到的區(qū)域不在已經(jīng)過的區(qū)域序列中Dis3 isDis1+Dis2,

要找到連接起點Area1到終點Area2的一條路徑,就先找到一個與起點Area1直接相連的區(qū)域Area3;將原始路徑問題改為找到“起點是Area3,終點是Area2”的路徑序列,如此用遞歸的方法最終可以解決原始問題。遞歸求解必須給出終止條件,如下。

當(dāng)path/8中的兩個區(qū)域直接相連,不再需要找到一個中間區(qū)域時,遞歸結(jié)束,得到滿足條件的路徑序列。
path/8中還用到其他約束條件,如not(member(Area3,Pathlist1))表示“中間區(qū)域Area3不在已經(jīng)過的區(qū)域序列Pathlist1中”,確保“不走回頭路”。該謂詞同時還列出經(jīng)過的節(jié)點序列和路徑的路程長度。
謂詞find_route/5從所有路徑中找出路程長度最小的路徑序列,由約束條件min(Dislist,Dis)來描述。若未找到答案,則返回空序列。

3.4 舉例
為了方便說明,截取圖1中CMEE第四層的局部區(qū)域,如圖4所示。用2.3節(jié)的方法建立語義地圖,用3.1節(jié)的方法生成形如“connect(c410,c4c3,c405d2,7276).”(表示房間c410和樓道c4c3通過節(jié)點c405d2相連,距離權(quán)值為7276 mm)的拓?fù)溥B接數(shù)據(jù)庫(即拓?fù)涞貓D)。為方便表達(dá),將拓?fù)潢P(guān)系畫在圖5中。

Fig.4 Partial area of the fourth floor of CMEE圖4 CMEE的第四層局部區(qū)域

Fig.5 Topological graph of Fig.4圖5 圖4所示區(qū)域的拓?fù)潢P(guān)系
在與機(jī)器人進(jìn)行交互時,如需要從樓道c4c3到目的地c410,進(jìn)行路徑規(guī)劃,可以發(fā)出詢問“find_route(b4c2,c410,Pathlist,Nodelist,Dis).”。 由 3.3 節(jié) 的謂詞find_route/5可以得到從樓道b4c2到房間c410的最短路徑:區(qū)域序列為Pathlist=[b4c2,p4bc1,c4c3,c410],途徑節(jié)點序列為Nodelist=[b4p01,c4p01,c405d2],總的距離和為Dis=66408 mm。最短路徑在圖5中用粗實線表示,可以看出,該最短路徑是正確的。
4 點與多邊形的位置關(guān)系
3.2 節(jié)中使用了一個謂詞point_ploygon/3,用來判斷點與多邊形的位置關(guān)系。這個謂詞在機(jī)器人的自定位中很有用。本章詳細(xì)說明這一謂詞的實現(xiàn)。
4.1 解決思路
點和多邊形的位置關(guān)系是計算機(jī)圖形學(xué)領(lǐng)域的基本問題[19-21]。常用的3種判斷方法是:夾角和檢驗法、叉積判斷法和射線法。其中,夾角和檢驗法需要進(jìn)行大量復(fù)雜三角運算;叉積判斷法只能判斷凸多邊形,不具備普適性,改進(jìn)后計算量也不容忽視;射線法是從待判斷點引一條射線,通過其與多邊形交點數(shù)的奇偶性進(jìn)行判斷,是最常用的一種方法。
文獻(xiàn)[22]基于射線法的基本原理,提出一種建立多邊形頂點坐標(biāo)數(shù)據(jù)庫,然后利用數(shù)據(jù)庫的SQL語言進(jìn)行搜索。設(shè)計合適的搜索條件,可以得到點與多邊形位置的判斷結(jié)果。方法簡便,運算效率高。本節(jié)的方法受這一思路的啟發(fā),將多邊形表示為Prolog數(shù)據(jù)事實,然后利用Prolog的搜索及推理機(jī)制,實現(xiàn)點與多邊形位置關(guān)系的判斷。在具體實現(xiàn)上本節(jié)將待判斷的點當(dāng)作坐標(biāo)原點,計算待判斷多邊形頂點的相對坐標(biāo);將點與多邊形的位置關(guān)系轉(zhuǎn)化為直角坐標(biāo)系的正橫軸與一系列邊線段的相交關(guān)系。算法處理邏輯清晰,算法應(yīng)用適合任何形式的多邊形。
4.2 算法描述
將多邊形平移到待判斷點為原點的坐標(biāo)系內(nèi),考慮任意邊與正x軸的相交關(guān)系,遍歷所有邊,計算總的相交次數(shù),可以得到點與多邊形的關(guān)系:若交點總數(shù)為奇數(shù),則被測點在多邊形內(nèi);偶數(shù),則在多邊形外;在多邊形上的情況需單獨判斷。如圖6給出了所有可能的點與線段的相對關(guān)系。

Fig.6 Positional relationship between point and lines圖6 點與線段的位置關(guān)系
(1)圖(a)表示線段在任一單獨的象限內(nèi),與正x軸無交點。圖(b)表示線段跨越1-2、2-3、3-4象限,無交點。圖(c)表示線段跨越1-4象限,有交點。這3種情況比較容易判斷,圖中的ΔQ為線段端點所處象限的差的絕對值,根據(jù)這個值就可以對應(yīng)這3種情況,進(jìn)而確定交點情況。有一種特殊情況如圖(d),將正y軸歸于第一象限,負(fù)y軸歸于第四象限,此時ΔQ=3與圖(c)一樣,但此時被測點處于線段上;為了區(qū)分這兩種情況,增加“兩端點橫坐標(biāo)均為0”的條件。
(2)圖(e)和圖(f)為 ΔQ=2的情況,即線段兩端點位于相對象限。此時可能有一個交點,或者無交點,或者在線段上。具體情況可依據(jù)線段與x軸的交點來區(qū)分,交點坐標(biāo)為:

x>0時,線段與x正半軸有一個交點;x<0時,線段與x正半軸無交點;x=0時,被測點處于線段上。
(3)圖(g)到圖(i)涉及到被測線段有端點在x軸的情況。為了處理這種情況,特別將x軸負(fù)半軸上的點集定義為第八象限,將x軸正半軸上的點集定義為第十六象限。若ΔQ=8,則兩端點分別位于x軸的正負(fù)半軸,如圖(g)所示,點在線段上;若ΔQ=4,5,6,7,則一端點位于x軸負(fù)半軸上,如圖(i)所示,線段與x正半軸無交點;若ΔQ=12,13,14,15,則一端點位于x軸正半軸上,如圖(h)所示,線段與x正半軸有交點。參照文獻(xiàn)[16]中給出的方法,根據(jù)走向給各交點賦不同的權(quán)值,比較兩端點的縱坐標(biāo):
若y2>y1,走向向上,交點個數(shù)取值+0.5;
若y2 若y2=y1,走向水平,交點個數(shù)取值0。 表1總結(jié)了圖6的所有情況,分為4類,其中0類和1類正好對應(yīng)“0個交點”和“1個交點”的情況。其中符號0(1)表示類型0的第一種情況,2(3)表示類型2的第三種情況,以此類推。 Table 1 Classification of positional relationship between point and lines表1 點與線段位置關(guān)系分類情況 根據(jù)以上分析,判斷待測點與多邊形位置關(guān)系的算法描述如下: (1)將待測點設(shè)為原點,對多邊形各頂點相對待判斷點進(jìn)行坐標(biāo)平移變換。 (2)若存在一多邊形頂點與原點重合,則待測點位于多邊形上,跳至(9)。 (3)檢測多邊形一邊線段與原點的關(guān)系,給出關(guān)系類型(如表1)。 (4)若其類型為2,則待測點位于多邊形上,跳至(9)。 (5)若其類型為0、1、3,則原點與線段的交點數(shù)分別為0、1、0.5(或-0.5)。 (6)檢查是否遍歷完所有邊。若無,則跳至(3)檢測下一條邊;若已遍歷完成,則繼續(xù)下一步。 (7)將點與遍歷過的各邊線段的交點數(shù)目求和。 (8)檢測結(jié)果:若交點和為奇數(shù),則點在多邊形內(nèi);若為偶數(shù),點在多邊形外。 (9)結(jié)束。 以上算法可以用任何編程語言來實現(xiàn),下面給出Prolog的程序?qū)崿F(xiàn),該程序充分利用Prolog的特點,結(jié)構(gòu)清晰,運行效率高。設(shè)計謂詞point_polygon/3,如下: point_polygon(Coor,Area,InOrOut):-%Coor為待測點,Area為多邊形區(qū)域,InOrOut標(biāo)志判斷結(jié)果 area(Area,[Head1|Tail]), %匹配出多邊形區(qū)域?qū)?yīng)的頂點坐標(biāo)序列 append([Head1|Tail],[Head1],List),%將坐標(biāo)序列首項添加至序列尾部 coor_transform(Coor,List,NewList),%以待測點為原點,對坐標(biāo)序列進(jìn)行坐標(biāo)變換 (member(coor(0,0,_),NewList),%判定點是否為多邊形頂點 InOrOut=-1;%若是,給InOrOut賦值-1 intersection_number(NewList,0,N), %逐項判斷原點與各新線段的位置關(guān)系及交點數(shù),累加得出交點總數(shù) round_mod(N,InOrOut)).%取整后判斷交點數(shù)的奇偶性,輸出InOrOut 上述算法預(yù)先將判斷點和多變形頂點重合的情況剝離;原坐標(biāo)點序列相對于待測點進(jìn)行相對坐標(biāo)轉(zhuǎn)換后,得到新的坐標(biāo)點序列和原點的相對位置關(guān)系,將線段端點的象限差作為分類依據(jù)進(jìn)行判別。 為便于對比驗證,采用文獻(xiàn)[22]中的范例,并稍加改動,將全部可能產(chǎn)生特殊交點的情況考慮進(jìn)去,以test命名測試區(qū)域,該區(qū)域事實為: area(test,[coor(240,22,_),coor(222,100,_),coor(347,31,_),coor(366,170,_),coor(302,226,_),coor(383,226,_),coor(337,352,_),coor(289,289,_),coor(185,289,_),coor(96,325,_),coor(182,170,_),coor(146,170,_),coor(80,200,_)]) 其中,謂詞area的第二個參數(shù)即為區(qū)域test的有序坐標(biāo)點序列,其二維平面圖像如圖7所示。坐標(biāo)點序列亦可參照表2。 Fig.7 Example of polygon area圖7 多邊形實例 Table 2 Vertex coordinates of polygon in Fig.7表2 圖7的多邊形端點坐標(biāo) 取10個有代表性的點進(jìn)行驗證(圖7中用圓圈包圍的數(shù)字),其中點①~⑤為文獻(xiàn)[22]中的范例點,方便對比驗證,⑥~⑩為隨機(jī)抽取的任意點。待測點①~⑩的二維坐標(biāo)分別為(216,64),(113,100),(200,170),(231,226),(158,289),(337,352),(103,260),(164.8,201),(247,135),(190,43)。程序運行結(jié)果:點①、③~⑤、⑨在多邊形內(nèi)部,點②、⑦、⑩在多外形外部,點⑥、⑧在多邊形邊上,符合實際情況。 針對前面第3章建立的語義地圖,對移動機(jī)器人的定位算法和程序進(jìn)行了真機(jī)實驗。CMEE的語義地圖數(shù)據(jù)庫由各樓棟和樓層中的所有區(qū)域事實和節(jié)點事實構(gòu)成,形如2.3節(jié)所述。全部的區(qū)域事實共665條,節(jié)點事實共924條。 在獲取機(jī)器人實時的三維坐標(biāo)后,借助3.2.2節(jié)所述謂詞building_by_coor/2可推理出其所在樓層,機(jī)器人的自定位問題便由三維轉(zhuǎn)化為二維平面問題。 例如,區(qū)域a420的事實為: area(a420,[coor(135475,45840,12800),coor(135621,46212,12800),coor(130870,48068,12800),coor(129560,44714,12800),coor(134311,42859,12800),coor(135111,44908,12800)]). 選取機(jī)器人所處3個位置:(1)節(jié)點a420d1(a420的1號門);(2)a421d1(a421的1號門);(3)a420內(nèi)部任意一點node420n1。這3個位置的坐標(biāo): node(a420d1,coor(135293,45374,12800)) node(a421d1,coor(136603,48727,12800)) node(node420n1,coor(132794,45259,12800)) 算法point_polygon/3的運算結(jié)果與實際相符,即點a420d1、a421d1和node420n1與區(qū)域的位置關(guān)系分別為在多邊形邊上(InOrOut=-1)、在多邊形外(InOr-Out=0)和在多邊形內(nèi)(InOrOut=1)。 機(jī)器人在建筑物內(nèi)自定位時,需要判斷機(jī)器人所在點的區(qū)域位置。依據(jù)前述建立的語義地圖及擴(kuò)展的語義數(shù)據(jù)庫,引入層次漸進(jìn)的搜索思路,先判斷所在樓棟,再判斷所在樓層,大大縮小了搜索范圍。下面的謂詞self_localization/2實現(xiàn)這一功能。 self_localization(Coor,Area):-%由坐標(biāo)信息得到所在區(qū)域 building_by_coor(Coor,Building),%找到所在樓棟 floor_by_coor(Coor,Floor),%找到所在樓層 building_by_name(Area,Building),%匹配特定樓棟的區(qū)域 floor_by_name(Area,Floor),%匹配特定樓層區(qū)域 point_polygon(Coor,Area,1).%匹配所在的區(qū)域 移動機(jī)器人的智能在很大程度上取決于機(jī)器人對人類環(huán)境的理解,實現(xiàn)這一點的基礎(chǔ)是機(jī)器人能夠理解人類對其所處環(huán)境的名詞概念,其實質(zhì)就是建立有關(guān)環(huán)境的知識庫。本文的工作以人用自然語言的方式,以對處于室內(nèi)的遠(yuǎn)程機(jī)器人的導(dǎo)航控制為背景,要求機(jī)器人能夠理解自然語言指令中的術(shù)語。以中南大學(xué)機(jī)電工程學(xué)院大樓為例,基于本體論建立了其室內(nèi)地名詞概念本體,用Prolog邏輯編程語言將該概念本體表述為其室內(nèi)環(huán)境的知識庫事實。Prolog邏輯推理功能的實現(xiàn)就是設(shè)計邏輯謂詞,邏輯謂詞的設(shè)計過程就是將其表述為約束滿足問題(CSP)的過程。本文設(shè)計的Prolog謂詞成功地用于建立語義地圖、機(jī)器人自定位、路徑規(guī)劃等機(jī)器人導(dǎo)航所需的基本任務(wù)。所有的程序均在SWI-Prolog環(huán)境下調(diào)試通過,程序運行結(jié)果符合預(yù)期。這里給出的是研究救災(zāi)機(jī)器人人機(jī)交互的一部分,其他相關(guān)的工作包括自然語言理解、自然語言對話系統(tǒng)、機(jī)器人人機(jī)交互軟件平臺等,各方面的研究還在繼續(xù)。本文作為機(jī)器人基于本體概念體系的邏輯推理實例,如自定位,是基于邏輯實現(xiàn)的,即在假設(shè)傳感數(shù)據(jù)準(zhǔn)確的條件下實現(xiàn)的,未涉及基于實體機(jī)器人的傳感數(shù)據(jù)采集等內(nèi)容。在機(jī)器人真機(jī)的現(xiàn)場實驗方面,文中的程序及算法均運行正常,但由于機(jī)器人的里程計等傳感數(shù)據(jù)及其處理在實際應(yīng)用中還存在不少問題,作為機(jī)器人系統(tǒng)的整體導(dǎo)航效果還不夠理想,這也是學(xué)術(shù)界正在研究的一個熱點問題。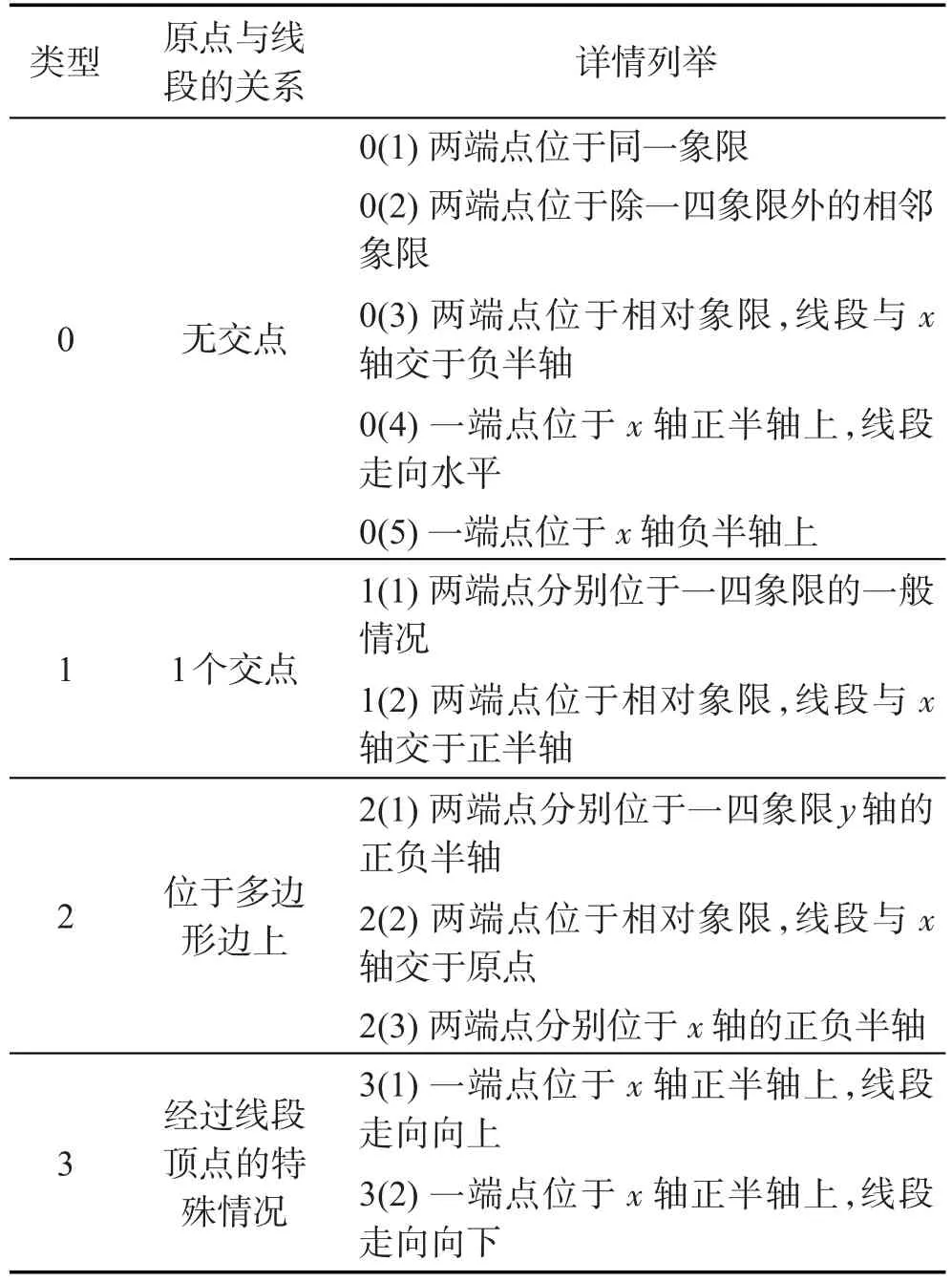
4.3 算法的Prolog實現(xiàn)
4.4 實例驗證


4.5 層次漸進(jìn)的自定位算法
5 結(jié)論
猜你喜歡
開放教育研究(2020年2期)2020-03-31 01:54:14
現(xiàn)代語文(2016年21期)2016-05-25 13:13:44
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學(xué)生導(dǎo)刊(2016年34期)2016-04-11 00:49:44
電測與儀表(2015年5期)2015-04-09 11:30:52
大連民族大學(xué)學(xué)報(2015年2期)2015-02-27 08:28:11
民生周刊(2012年10期)2012-10-14 09:06:46
外語學(xué)刊(2011年1期)2011-01-22 03:38:33