基于DL-MOPSO算法的等效燃油消耗最小能量管理策略優化研究?
2018-10-13 02:19:46仇多洋劉炳姣陳一鍇
汽車工程 2018年9期
石 琴,仇多洋,吳 冰,劉炳姣,陳一鍇
(合肥工業大學汽車與交通工程學院,合肥 230009)
前言
混合動力汽車的能量管理是一個非線性、多變量、多目標的時變系統,其策略的優劣直接影響著混合動力汽車的動力性、經濟性和排放性能。大量的文獻從不同的角度提出了不同的能量管理策略。其中基于規則的管理策略主要是依據工程經驗或實驗數據反復調試控制閾值,因此較易實現,魯棒性好,開發成本低,但依賴于經驗水平,且工況適應性差[1-4]。基于全局優化的能量管理策略需要預知行駛工況信息,因此具有一定的局限性,難以用于實車控制[5-7]。而等效燃油消耗最小策略(equivalent fuel consumption minimization strategy, ECMS)具有結構簡單,運算量小,無需先驗知識,并且通過引入懲罰函數,使得該策略具有良好的電量保持特性,使其較好地適用于插電式混合動力汽車的電量保持階段的能量管理,因此被廣泛研究[8-10]。ECMS最早作為一個求解最小值方法由Paganelli提出,并應用在混合動力系統能量管理中[11];Aiyun Gao等人將ECMS應用在并聯混合動力汽車的實時優化控制中,獲得了較好的燃油經濟性和電量保持性能[8];Chao Sun等人建立了一種帶有車速預測的自適應ECMS,最終油耗減少超過3%[9];沈登峰等人基于龐氏最小值原理,建立以等效瞬時燃油消耗最小為目標的ECMS,結果顯示油耗降低12.31%[12];詹森等人將行駛工況識別技術和ECMS結合起來,通過識別當前工況類型,調整等效因子,獲得實時最優控制,與未采用識別相比,油耗降低7.47%[13]。苗強等人建立一種可變SOC參照的ECMS,相比于固定SOC參照,減少了23kJ等效能量消耗[14];徐成善等人在循環工況已知的前提下,將ECMS應用于某增程式混合動力汽車,結果表明ECMS更適用于增程式混合動力汽車[15];陳龍等人將ECMS應用于插電式串聯混合動力城市公交車,硬件在環實驗表明ECMS能減少能量的消耗,實時控制性好[16];林歆悠等人對ECMS中SOC懲罰系數進行修正,并利用遺傳算法優化了修正系數,燃油經濟性提高20.81%[17];司遠等人將ECMS應用在四驅混合動力系統中,利用遺傳算法優化充放電等效因子,硬件在環仿真表明,相比未優化的ECMS,燃油經濟性提高2.68%[18]。
ECMS核心算法包括3個關鍵部分,第1部分是對于某一特定行駛工況,尋找最優充電和放電等效因子,第2部分是在確定等效因子的前提下,對于任意瞬時功率或轉矩需求,求解發動機和電機的最優功率或轉矩分配,第3部分是選擇合理的懲罰系數,提高混合動力汽車的電量保持性能。而當前對于ECMS的研究大都側重于某一部分,并未綜合考慮3個部分對ECMS的影響,且研究過程中,大多采用離散窮舉法獲得最優充電和放電等效因子以及發動機和電機的功率分配方式,尋優結果較好,但未利用智能優化算法進行尋優。部分文獻利用遺傳算法獲得最優充電和放電等效因子,而功率分配方式則采用窮舉法獲得,因此若在優化等效因子的同時利用智能算法對功率分配進行尋優,則可進一步提升整車燃油經濟性。因此對于ECMS的優化問題,是一個不連續、非可導的內外層嵌套多目標優化問題,目前尚未見利用多目標智能優化算法同時對充放電等效因子和功率分配方式進行尋優的研究。
針對以上問題,本文中以降低燃油消耗量和減小SOC終值與目標值偏差為優化目標,建立基于P2構型的某ISG型混合動力汽車Simulink模型,利用模型描述ECMS參數與目標參數之間的非線性關系,提出一種內外層嵌套的雙層多目標粒子群算法(double-loop multi-objective particle swarm optimization,DL-MOPSO)對充放電等效因子和功率分配方式同時進行尋優,即以目標函數最小的前提下,尋得最優充放電等效因子下任意需求功率時發動機和電機最優功率分配方式的Pareto解集前沿,對尋優結果進行仿真,與傳統基于窮舉法構建的ECMS相比,燃油經濟性明顯提高。
1 ISG型混合動力汽車結構與建模
本文中研究的ISG型混合動力汽車整車結構如圖1所示。模型涉及的主要零部件包括發動機,電磁離合器C,ISG電機,蓄電池組,AMT自動變速器,主減速器,電子附件和車輪。動力及傳動系統參數如表1所示。
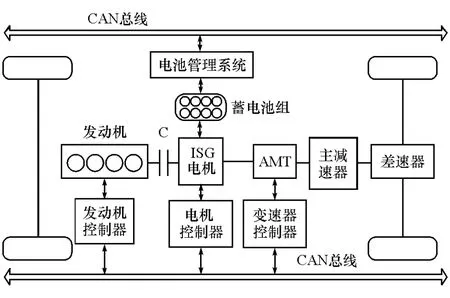
圖1 整車動力傳動系統結構圖
1.1 整車縱向動力學模型
發動機和電機同軸相連,離合器閉合狀態下轉速相同,因此可根據轉矩傳遞路徑建模。具體運動學方程為
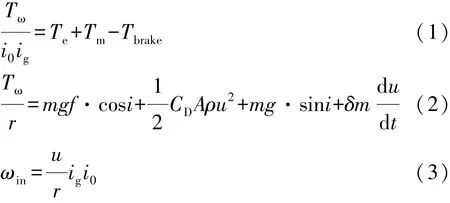
式中:Tω為車輛行駛所需轉矩;Te為發動機輸出轉矩;Tm為電機輸出轉矩;Tbrake為摩擦制動轉矩;i0為主減速器傳動比;ig為變速器傳動比;r為車輪半徑;m為汽車質量;g為重力加速度;f為滾動阻力系數;CD為空氣阻力系數;A為迎風面積;ρ為空氣密度;i為道路坡度;u為車速;δ為汽車旋轉質量換算系數;ωin為變速器輸入軸旋轉角速度;t為時間。
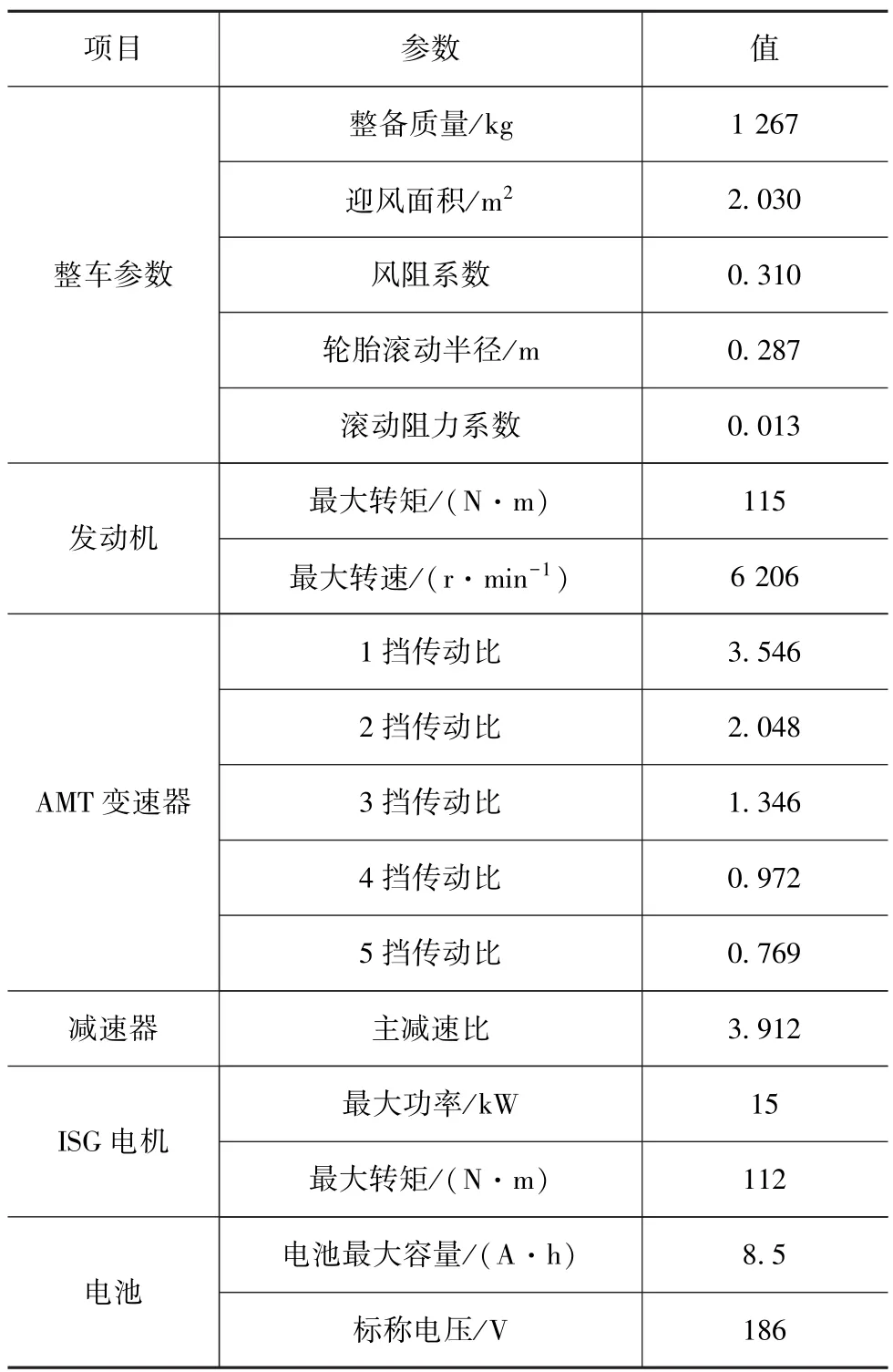
表1 動力及傳動系統參數
1.2 發動機模型
發動機模型共包括兩個子模塊,分別是轉矩計算模塊和燃油消耗計算模塊。采用實驗數據法建模,即通過查詢發動機速度特性曲線和萬有特性曲線插值計算發動機實際輸出轉矩和消耗的燃油。方程如下:

式中:ne為發動機轉速;α為節氣門開度;Te為發動機輸出轉矩;bfuel為發動機瞬時燃油消耗率。
1.3 ISG電機模型
電機模型共包括3個子模塊,分別是轉矩計算模塊、驅動模式電流計算模塊和發電模式電流計算模塊。轉矩計算模塊方程為

式中:Tm為電機輸出轉矩;nm為電機轉速;U為電機工作電壓。
在電流計算模塊中,電機工作效率受電機工作狀態影響較大,因此同樣采用實驗數據法建立電機效率模型,驅動和發電兩種工作模式下電流計算方程為
式中:η為電機效率;Idis為驅動模式工作電流;Ichg為發電模式工作電流;Treg為制動回收轉矩。
1.4 電池模型
電池模型采用內阻 開路模型,包括電池溫度計算模塊、電池開路電壓及內阻計算模塊、SOC估計模塊,電壓動態關系為
式中:Rbat為電池內阻;T為電池溫度;SOC為電池荷電狀態;Uocv為電池開路電壓;SOC0為電池初始荷電狀態;C為電池容量;Ibat為電池電流;Pbat為電池功率。
1.5 駕駛員模型
駕駛員模型根據車輛需求車速和實際車速的偏差控制加速踏板和制動踏板的大小,使得行駛車速跟隨目標車速。該模型采用PID控制,即通過調整上述車速偏差、車速偏差變化率和車速偏差的積分的增益系數(比例kp,積分ki,微分kd)的大小達到車速跟隨的目的,調整公式如下:
式中:e(t)為車速誤差;vobj(t)為目標車速;v(t)為實際車速;α(t)為加速踏板開度信號;β(t)為制動踏板開度信號;a0(t)為PID控制信號。
2 構建DL-MOPSO算法的ECMS優化模型
2.1 ECMS控制算法
ECMS控制思想為:根據整車的實際駕駛員請求功率,在發動機和電機的功率范圍內合理分配發動機和電機的實際輸出功率,使得發動機瞬時燃油消耗率me和電機消耗電量的等效燃油消耗率mm的總和最小,即

式中:mequ(t)為t時刻系統總燃油消耗率;me(t)為發動機燃油消耗率,可由發動機模型求得;mm(t)為電機消耗電量的等效油耗。mm(t)計算公式為
式中:Pm(t)為t時刻電機的功率;HL為汽油質量熱值常數;ηdis(t)和ηchg(t)分別為t時刻某種功率分配方式時電池放電和充電的效率;λdis和λchg分別為驅動和發電模式時放電和充電等效因子,其值與行駛工況類型有關。
由于單純的ECMS不能很好地維持電池SOC平衡,因此引入懲罰函數對等效油耗進行修正,使其維持在目標SOC附近。具體原則為電池SOC高于目標SOC值時,懲罰系數小于1,通過懲罰系數降低電機消耗電量的等效油耗,使控制策略更傾向于使用電能;電池SOC低于目標SOC值,懲罰系數大于1,通過懲罰系數增大電機消耗電量的等效油耗,使控制策略更傾向于使用燃油,懲罰函數如下:
式中:ψ(SOC)為懲罰系數;SOCtar為目標 SOC值;SOChigh和SOClow分別為SOC維持范圍的上下限。修正后的充電和放電等效因子可分別表示為

將式(18)中等效因子 λdis和 λchg替換為 λ?dis和,同時考慮t時刻制動能量回收功率P(t)對電reg機消耗的功率進行補償,則修正后電機消耗電量的等效燃油消耗率計算公式如下:
2.2 內外層嵌套ECMS優化問題提出
ECMS的目標函數是使系統總等效燃油消耗量最小,但若僅考慮總等效油耗,必然導致電池電量難以保持平衡。從維持電池電量平衡的角度出發,應使SOC終止值與目標值差值最小。因此ECMS的優化是一個多目標優化問題,即保持總等效燃油消耗量和SOC終止值與目標值差值同時最小。從ECMS的計算流程可以看出,在計算系統總等效燃油消耗量時,主要變量為充電等效因子、放電等效因子和分配的電機功率。而對于某一行駛工況而言,充電等效因子和放電等效因子是一對常數,分配的電機功率是隨著行駛功率需求變化而不斷變化,因此既要尋找該行駛工況下最優充放電等效因子,又要獲得該充放電等效因子下發動機和電機最優功率分配方式。所以上述ECMS的多目標優化函數是一個涉及內外層嵌套優化的不連續優化問題,基于梯度的最速下降法、共軛梯度法等傳統優化方法難以有效解決該問題,而遺傳(GA)算法,多目標粒子群優化(MOPSO)算法等仿生算法雖不受優化問題的連續性限制,但并不能同時滿足內外雙層的優化目的,故也無法直接用于求解內外層嵌套優化問題。因此,應設計出一種不受優化問題連續性限制的算法,用于求解上述多目標優化問題。本文中基于多目標粒子群優化算法(MOPSO),設計出一種新穎的內外層嵌套的雙層多目標粒子群優化(DL-MOPSO)算法,用于解決上述不連續的內外層嵌套優化問題。DLMOPSO算法由內層MOPSO算法和外層MOPSO算法嵌套而成。其中,內層MOPSO算法用于計算某一對充放電等效因子下,該行駛工況需求功率變化時發動機和電機最優功率分配方式,外層MOPSO算法用于尋找該行駛工況對應的最優充放電等效因子,并通過Pareto解集前沿的更新建立內外層算法之間的聯系,以保證外層MOPSO算法對充放電等效因子的不斷尋優,進而可解決不連續的內外層嵌套優化問題。
2.3 內外層嵌套ECMS優化算法
DL-MOPSO算法流程圖如圖2所示。圖中外層MOPSO算法的收斂條件包括兩個:最大迭代次數;連續30次迭代,無新的Pareto解保存到外部歸檔集。滿足兩個條件其中之一,則DL-MOPSO算法停止。
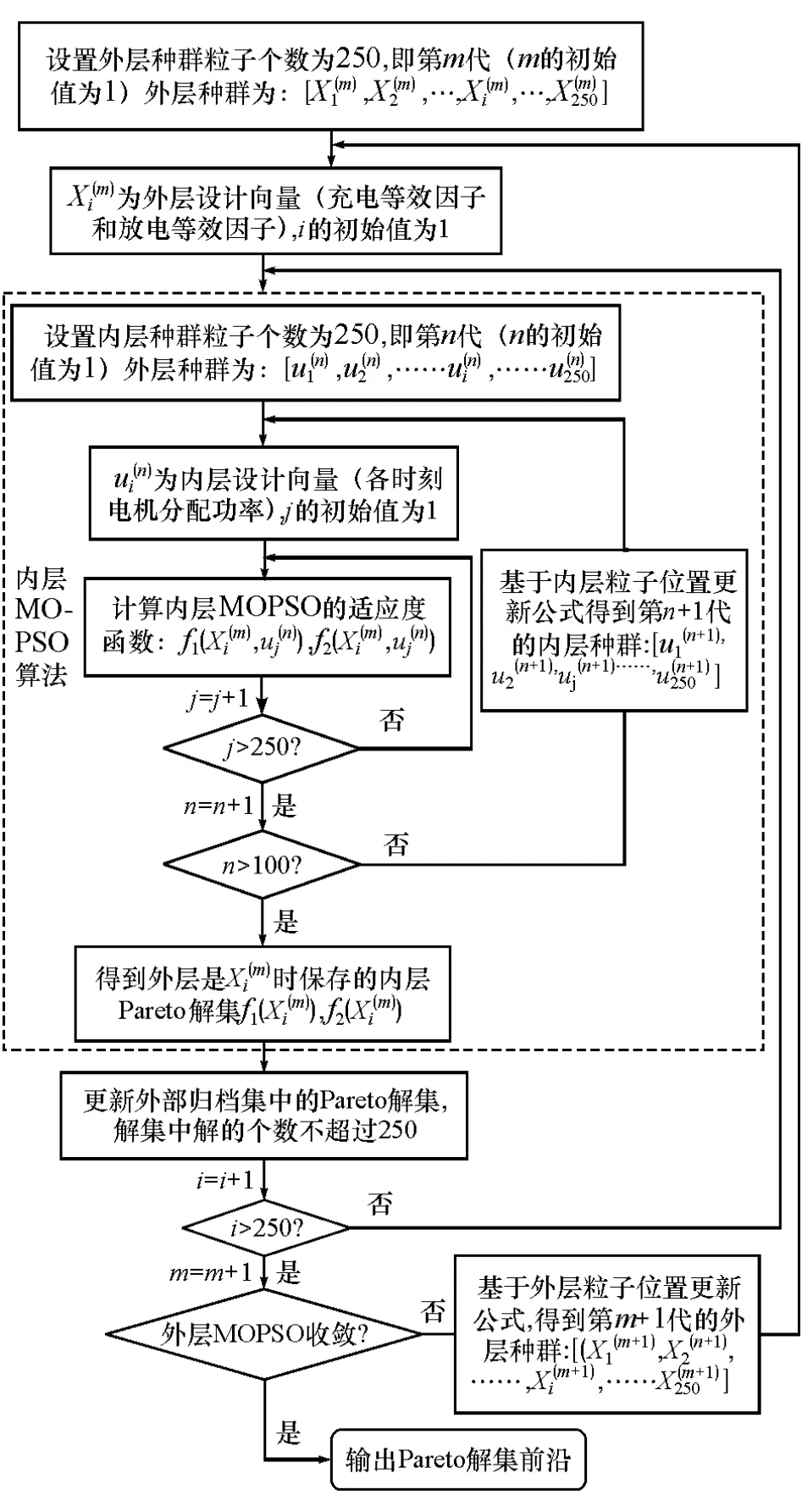
圖2 DL-MOPSO算法流程
DL-MOPSO算法的基本步驟如下。
若已知下游斷面水位Z下,按公式推算上游一斷面水位Z上,該水位對下一個流段來講,又是下游水位。循環上述步驟,可依次求出上游各斷面水位。
(1)設置外層MOPSO算法的種群粒子個數為250,即第m代外層種群為 X(m),X(m)=[,,…,,…,](m為外層算法迭代次數,設置為100,初始值為1)。
(3)設置內層MOPSO算法的種群粒子個數為250,即第 n 代內層種群為 un,un= [,,…,,…,],(n為內層算法迭代次數,設置為100,初始值為1)。

(5)j=j+1,如果 j>250,則跳轉至步驟(6),否則,跳轉至步驟(4)。
(6)n=n+1,如果 n>100,則跳轉至步驟(8),否則,跳轉至步驟(7)。
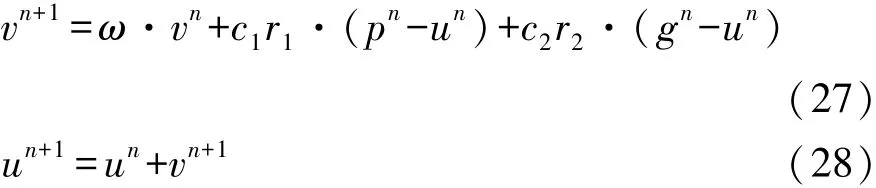
(7)內層粒子的位置更新公式:

跳轉至步驟(4),并更新MOPSO算法外部歸檔集中的Pareto解集。
(8)i=i+1,如果 i>250,則跳轉至步驟(9),否則,跳轉至步驟(2)。
(9)m=m+1,若滿足收斂條件,則跳轉至步驟(11),否則,跳轉至步驟(10),收斂條件如下:
a.m>250;
b.連續30次迭代,無新的Pareto解保存到外部歸檔集。
(10)外層粒子的位置更新公式:
式中參數解釋同內層。得到新的外層種群:

跳轉至步驟(1)。
(11)輸出Pareto解集前沿。
2.4 約束條件
在雙層MOPSO算法尋優過程中,需要對涉及的變量進行約束,包括發動機功率、電機功率和電池SOC。諸多ECMS的研究中,對上述參數的約束只考慮最值問題,并未考慮轉速狀況和行駛功率需求,
(5)j=j+1,如果 j>250,則跳轉至步驟(6),否則,跳轉至步驟(4)。
(6)n=n+1,如果 n>100,則跳轉至步驟(8),否則,跳轉至步驟(7)。
(7)內層粒子的位置更新公式:
式中:ω為慣性權重;r1和r2為分布于[0 1]區間的隨機數;n為當前迭代次數;p為個體最優粒子位置;g為全局最優粒子位置;c1和c2為常數;v為粒子速度;u為粒子位置。得到新的內層種群:因此需要對約束條件進行改進,約束如下:

式中:Pe(t)為t時刻發動機的功率;Preq(t)為t時刻行駛工況的需求功率。對電機和發動機功率的約束具體分以下兩種情況:
(1)當Preq(t)>Pm_max(nm(t))時,

(2)當Preq(t)≤Pm_max(nm(t))時,

式中:Pm_max(nm(t))為t時刻轉速nm時電機所能提供的最大功率,即最大驅動功率;Pm_min(nm(t))為t時刻轉速nm時電機所能提供的最小功率,即最大發電功率;Pe_max(ne(t))為t時刻轉速ne時發動機所能提供的最大功率。
3 DL-MOPSO算法求解
本文中在Matlab/Simulink平臺搭建ECMS控制策略模型,并將控制策略模型嵌入已建立好的整車模型,頂層控制策略和整車模型如圖3所示。利用Matlab編寫充放電等效因子和功率分配方式同時優化的DL-MOPSO算法程序,優化過程中通過函數不斷調用Simulink整車和控制策略模塊,獲得適應度函數值。參考文獻[13]~文獻[18],充電等效因子和放電等效因子的優化范圍設置為[0,5],工況選擇燃油經濟性評價常用的NEDC工況。電池SOC上下限分別為0.7和0.6。最終得到多目標優化的Pareto解集前沿。這里分別列舉優化過程中隨機保存的某一組外層粒子時得到的內層Pareto解集和最終DL-MOPSO算法優化得到的Pareto解集前沿,分別如圖4和圖5所示。由圖4可以看出,該內層解集中適應度函數f1的值均較大,因此該外層粒子對應的內層解集均不保存在外層解集前沿中。由圖5可以看出,最終保存的解集中,油耗范圍為5.6~5.8,而SOC終值與目標值之差變化范圍為0~0.05。Pareto解集前沿由Pareto解構成,設計人員仍需從解集前沿中選出最優解。本文中通過構建評價函數,用于選擇最優解。
MOPSO中粒子的擁擠距離越大,該粒子被選為最優粒子的概率也越大[19],將上述Pareto解集前沿按擁擠距離從大到小排序,取前30個Pareto解所對應的f1和f2,構建總評價函數:
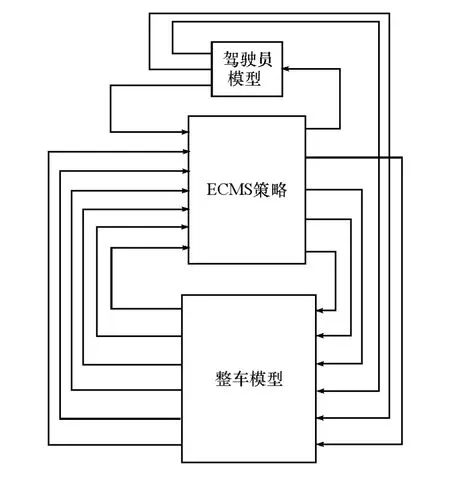
圖3 整車及控制策略頂層模塊
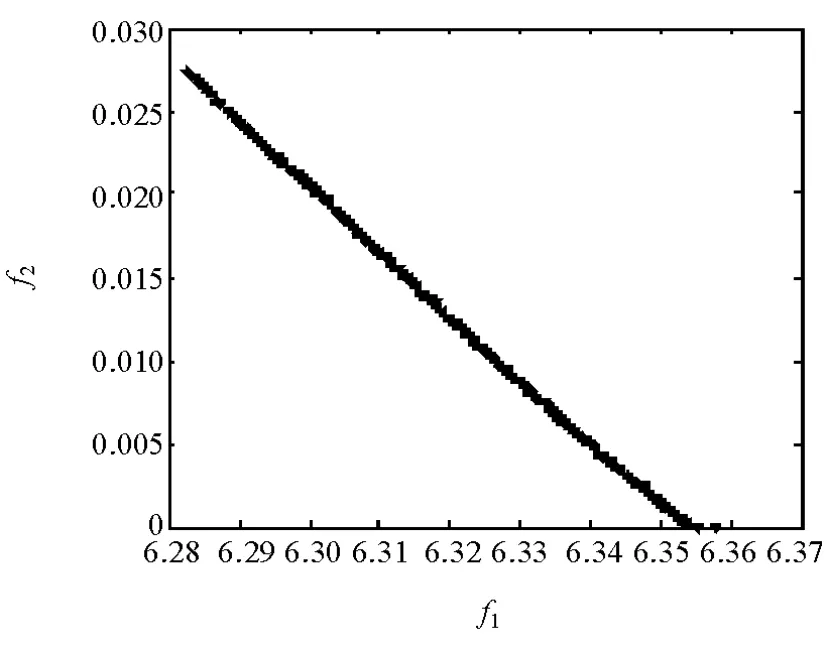
圖 4 λchg=2.1,λdis內層 Pareto解集
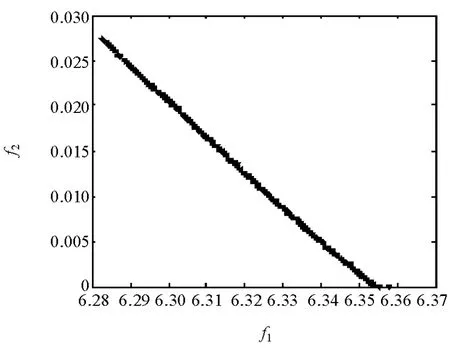
圖5 DL-MOPSO算法輸出的解集前沿

式中:?1和?2為權重系數;γ為評價指標。依據上述30個Pareto解的f1和f2,采用直接加權法[19],可計算權重系數?1和?2。采用該方法取權重系數時,當某適應度函數的數值變化范圍愈寬時,權重系數就取較小值;當數值變化范圍愈窄時,權重系數就取較大值,因此該方法可以達到平衡各分適應度函數值數量級的作用。 求得 ?1=143.885,?2=1810.938。分別將30個Pareto解的f1和f2帶入式(32)中計算。評價函數γ值越小,表明在整車仿真中,燃油經濟性和SOC偏差總體水平越好。最小γ=836.243,所對應的外層解為 λchg=1.549,λdis=1.202,所對應的內層解,即該充放電等效因子下發動機和電機最優功率分配方式如圖6和圖7所示。
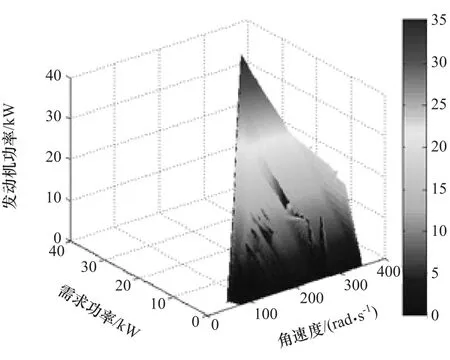
圖6 發動機功率分配方式
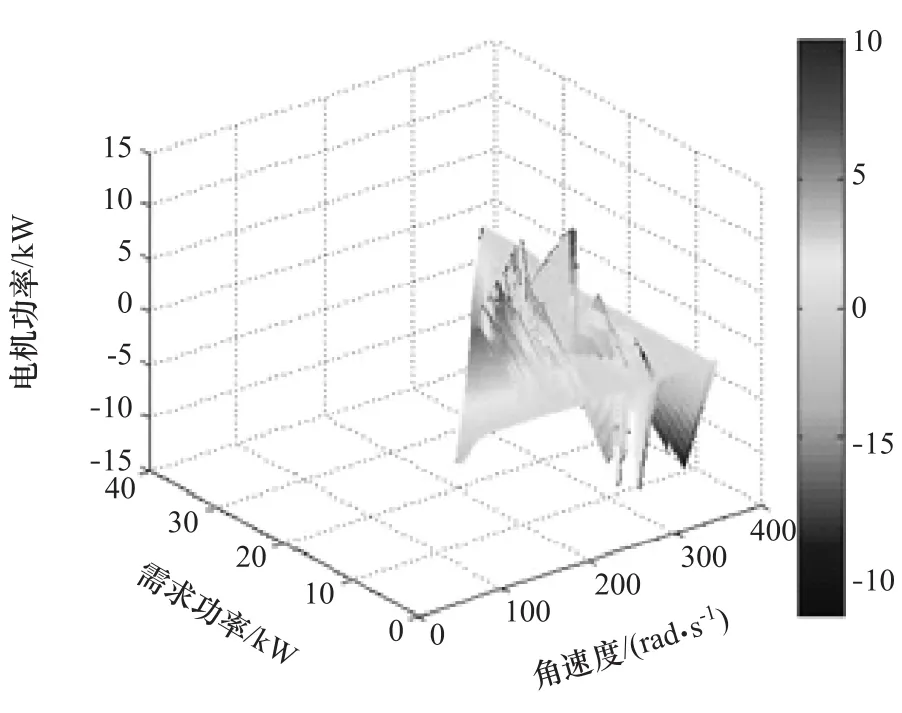
圖7 電機功率分配方式
4 基于DL-MOPSO算法優化的ECMS效果分析
為了進行對比分析,分別將傳統ECMS和經過DL-MOPSO算法優化的ECMS封裝成模塊嵌入整車模型中,初始SOC設定為0.63,電池SOC上下限分別為0.7和0.6,仿真工況為NEDC工況。傳統ECMS中利用窮舉法獲得的最優充放電等效因子為λchg=2.250,λdis=2.130。 兩種情形下仿真過程車速跟隨情況及主要部件工作狀況如圖8~圖10所示。由圖8可知,兩種情形下ECMS都滿足車輛需求功率,使得實際車速與目標車速基本吻合,車速跟隨誤差較小。
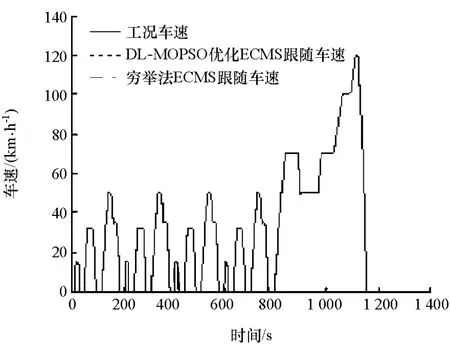
圖8 兩種情形下車速跟隨情況
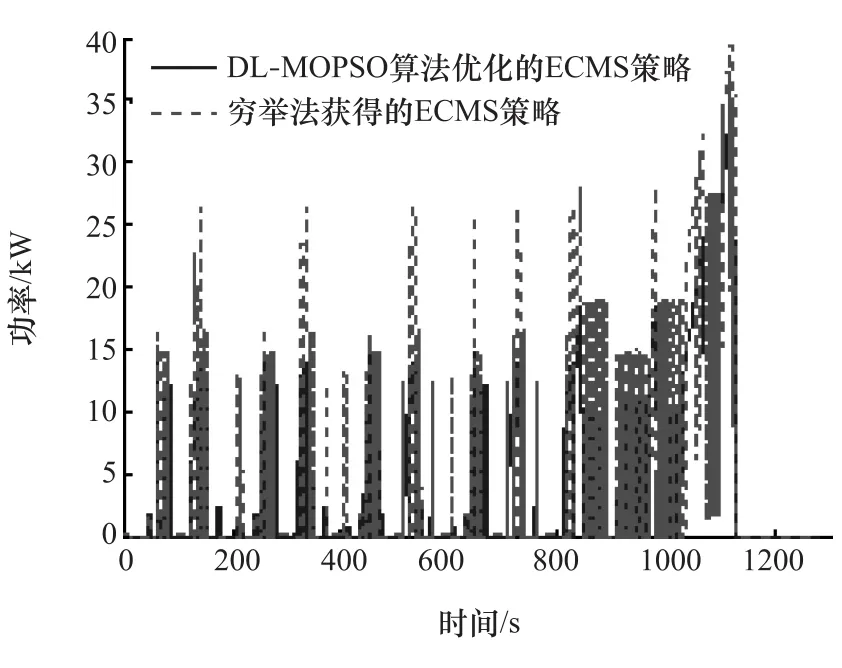
圖9 發動機輸出功率
由圖9和圖10可見,在NEDC工況的前4個ECE階段,窮舉法獲得的ECMS下(以下簡稱策略1),發動機和電機的輸出功率波動較大,而經過DLMOPSO算法優化的ECMS(以下簡稱策略2)下,發動機和電機的輸出功率波動均減小。該階段需求功率較小,在滿足功率需求的前提下,通過尋優,合理地確定ISG電機輸出的功率補償需求功率與發動機功率之間的差值,從而保證發動機工作在中等負荷的最佳燃油經濟性區域。而在EUDC階段,功率需求較大的情況下,策略2則使發動機始終保持較大的功率穩定輸出,而ISG電機則起到輔助作用,因此電流波動不大,需求功率減小則對電池充電,需求功率增大則進行助力。而策略1下,發動機輸出功率則波動劇烈,進而使得電池輸出和輸入電流波動劇烈,降低充放電效率,同時發動機也因輸出功率劇烈變化而降低燃油經濟性。
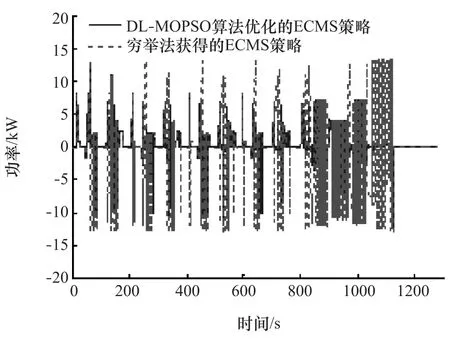
圖10 電機輸出功率
由圖11可知:策略2累積燃油消耗量為960g,百公里油耗為5.788L;策略1燃油消耗量為1 070g,百公里油耗為6.451L。經過DL-MOPSO算法尋優后,燃油經濟性提高10.28%。由圖12可知,兩種策略下SOC保持性能均較好,但策略2下SOC變化相對平穩,且電池充放電次數減少,有利于提高系統效率和電池壽命。
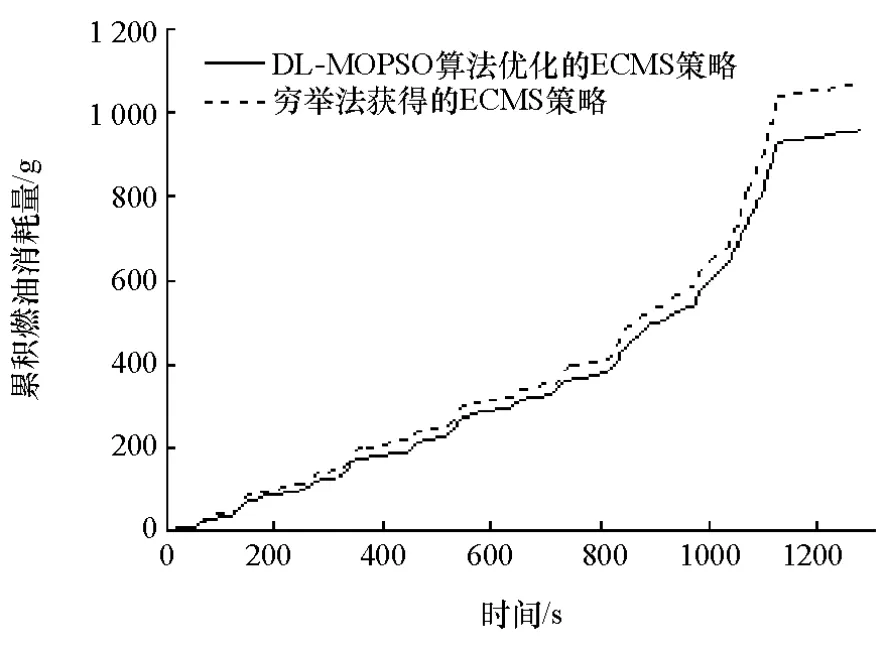
圖11 累積燃油消耗量
5 懲罰系數對ECMS影響分析

圖12 SOC變化情況
通過懲罰函數計算得到懲罰系數值,主要用于修正電機消耗電量的等效油耗,調控對電能的使用傾向,維持電量在SOC目標值附近。由圖13可知,電池SOC大于SOC目標值0.65時,懲罰系數小于1,降低電機消耗電量的等效油耗,增加使用電能傾向;電池SOC小于SOC目標值0.65時,懲罰系數大于1,增大電機消耗電量的等效油耗,增加使用燃油傾向。相同SOC值時,由于β不同,懲罰力度也不同,等效油耗也不同,進而影響發動機和電機的功率分配,因此需進一步分析不同β值對ECMS的影響。由圖13可以看出,隨著β不斷增大,懲罰系數曲線趨于收斂,因此這里分別以β值為圖13中6種情況優化時得到f1和f2兩個適應度函數值為例分析,得到的f1和f2結果如圖14。
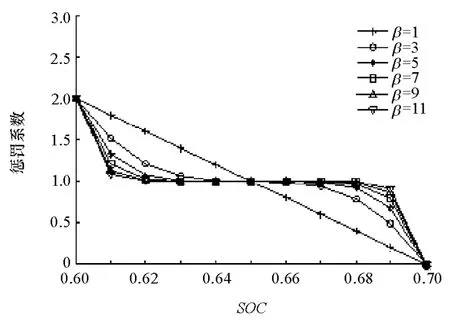
圖13 懲罰系數隨SOC變化情況
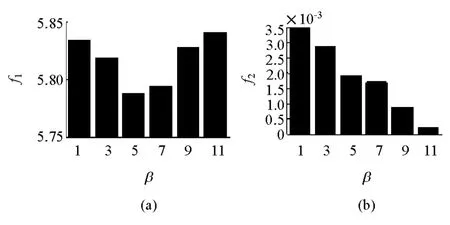
圖14 不同β時f1和f2結果
由圖14可知,隨著β的增大,電池SOC的保持性能越來越好。當β較小時,f1和f2均較大;當β較大時,雖具有良好的電量保持性能,但是整車燃油經濟性較差;當β取中間值時,SOC偏差的量級已經很小,且燃油經濟性最佳。綜上所述,在選擇懲罰系數的β參數時,應取中間值,即5或7。
6 結論
(1)將ECMS封裝嵌入整車Matlab/Simulink模型中,建立基于PID控制的駕駛員模型,仿真結果表明車速跟隨效果良好,車速跟隨誤差較小。
(2)針對ECMS核心算法的前兩個關鍵部分,以降低燃油消耗量和減小SOC終值與目標值偏差為兩個優化目標,提出一種內外層嵌套的DL-MOPSO算法對充放電等效因子和功率分配方式同時進行尋優,得到最優充放電等效因子下任意需求功率時發動機和電機最優分配方式的Pareto解集前沿,并通過直接加權法獲得最優解。對尋優結果進行仿真,與傳統基于窮舉法構建的ECMS相比,燃油經濟性提高10.28%,電池SOC具有良好的保持性能且更加穩定。在后續的研究中,將通過在環實驗,驗證該優化的ECMS具有更好的整車燃油經濟性和電量保持性能。
(3)分析了懲罰函數中β參數值對EMCS策略尋優結果的影響。結果表明:隨著β值的增大,電池SOC保持性能逐漸增加,但整車燃油經濟性先減小再增加,因此β應取中間值5或7。
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
汽車維修與保養(2021年8期)2021-02-16 00:28:30
汽車維修與保養(2021年8期)2021-02-16 00:28:18
現代企業(2015年2期)2015-02-28 18:45:09
汽車與新動力(2015年1期)2015-02-27 12:11:01
汽車與新動力(2014年2期)2014-02-27 12:10:15