基于光流法與RPCA的紅外運動目標檢測
2018-10-13 07:58:14于雯越安博文趙明
現代計算機 2018年23期
關鍵詞:檢測
于雯越,安博文,趙明
(上海海事大學信息工程學院,上海201306)
0 引言
紅外成像[1]是通過目標的紅外熱輻射進行成像的,紅外成像系統可晝夜工作,能對距離較遠的目標進行檢測,應用范圍比較廣,紅外圖像目標檢測等經常應用在軍事和民用方面。本文中區域生態及海表時空監測系統主要針對安全監測和海表觀測需求開展載荷研制與應用處理技術研究。安全監視系統的研究主要針對背景干擾嚴重、圖像信噪比低、晝夜連續監測預警的特點,發揮紅外信息獲取優勢,從而實現基于熱紅外載荷圖像序列進行海面敏感目標檢測。在復雜的背景中,圖像噪聲、海面雜波、圖像運動、攝像機晃動等都會影響目標檢測的效果。目前,背景減除法[2]、幀間差分法[3]和光流法[4]等應用在紅外圖像檢測上是比較經典的方法。背景減除法的優點是在運動情況復雜的環境中能較為完整地檢測出運動的物體,關鍵是如何建立較好的背景模型;目前最為廣泛的是混合高斯背景建模算法,但是缺點是當背景突變時會導致檢測失敗,使得檢測結果出現錯誤;幀間差分法在檢測紅外運動目標時,能夠較為快速地得到目標的運動區域,這能使目標快速呈現在圖像中,并進行大致判斷,但是當目標的運動速度比較緩慢時,幀差法檢測出的結果較差,“空洞”現象會存在于前景結果中;光流法目標檢測能夠針對獨立運動的物體,當攝像機運動時,也可對目標進行檢測,背景差分法和幀間差分法在此種情況下,效果就較差,但是對于背景光線的狀態比較敏感,實時性較差,比較耗時;針對此種情況,提出改進的算法,采用RPCA算法提取前景,再利用光流法進行目標檢測,避免了耗時,改善了幀間差分法的“空洞”檢測效果,同時也降低了光照等因素影響。當背景產生突變時,例如,突然的光照,或者抖動,檢測效果影響不大。
1 基于魯棒主成分分析(RPCA)的前景矩陣模型
本文提出基于RPCA[5]的運動目標檢測算法,首先獲得稀疏前景矩陣,主要是通過主成分追蹤方法。對于RPCA算法的求解的方法主要有IT法、APG法、EALM法、IALM法等,生成稀疏矩陣S,正則化參數的λ值固定為0.05。表1為各個算法的比較:
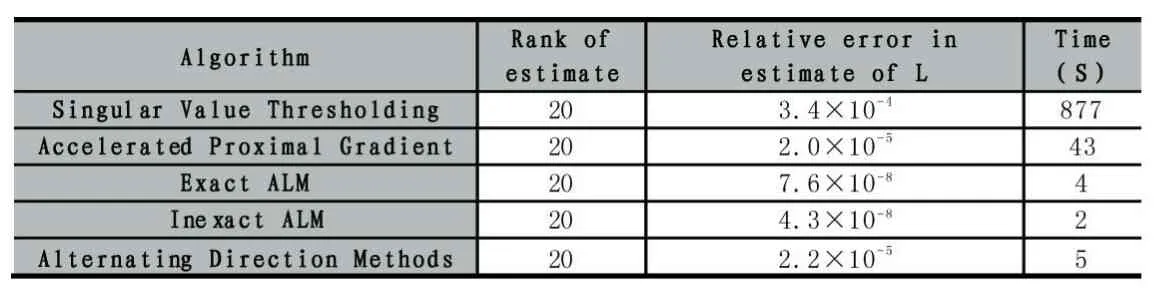
表1 RPCA算法比較
精確增廣拉格朗日乘子(Exact Augmented Lagrange Multiplier Method,EALM)算法需要求解優化問題的精確解,非精確增廣拉格朗日乘子(Inexact Augmented La?grange Multiplier Method,IALM)算法[9]不需要對其求解,并且是EALM算法的改進版,其計算速度也更快,所以使用非精確拉格朗日乘法求解RPCA來進行計算。
用ALM方法求解可定義為:

其拉格朗日函數為:

為了得到RPCA最優解,非精確增廣拉格朗日乘子算法對優化目標Lk和Sk進行計算,如下是IALM算法:
輸入:矩陣M∈Rm×n,正則化參數λ

2:當未達到收斂條件時通過 3、4及等式(2)Lk+1=argminLf(L,Sk,Yk,μk)
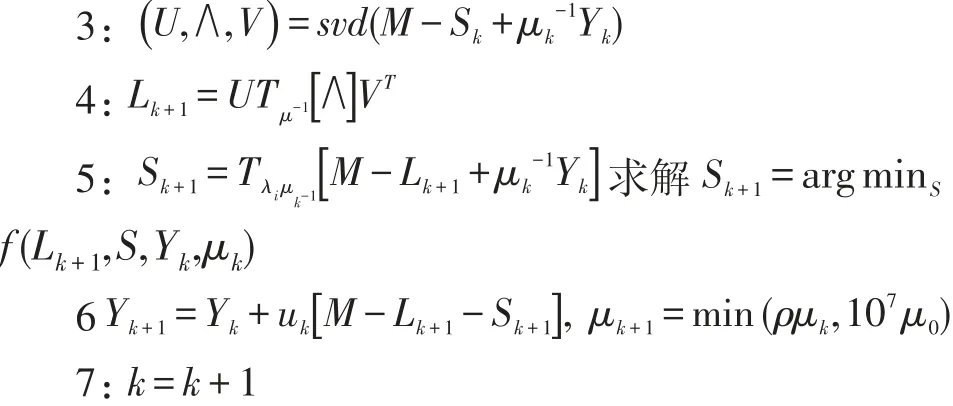
輸出:(L,S)的估計值(Lk,Sk)。求得背景矩陣及稀疏矩陣。
2 金字塔Lucas-Kanade(LK)光流法目標檢測
針對RPCA與光流法結合[6]的紅外運動目標檢測分為三個部分。第一部分:讀取紅外運動圖像序列。第二部分:通過RPCA算法提取稀疏矩陣,得到運動區域。第三部分,對運動區域進行目標檢測,此處使用金字塔LK光流法,提取出運動目標。主要實驗流程如圖1所示。
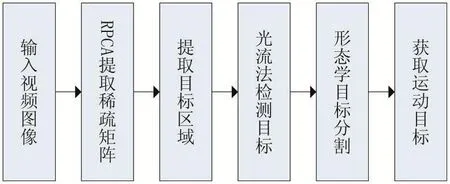
圖1 實驗流程圖
2.1 角點檢測
(1)Harris角點檢測[7-8]
角點常見的兩種定義方式:一、角點的鄰域內具有兩個主方向的特征點。二、兩個邊緣的交點為角點。角點是圖像亮度發生劇烈變化,例如:突然產生的光照等或者圖像邊緣曲線上曲率極大值的點。
Harris角點算法是通過自相關矩陣和微分運算檢測的。定義一個二階導數 (?2x,?2y,?x?y)矩陣,是一個二維Hessian矩陣:
自相關矩陣[9],定義如公式(4):
其中,wi,j代表可歸一化的權重比例。圖像的M(x,y)的兩個最大特征值[10]處是Harris角點。矩陣H(p)的跡和H(p)的行列式相減得到的值,再與給出的閾值比較,得到角點。Harris角點計算比較簡單,目標檢測之前進行角點的檢測,主要是檢測大量的有用的特征點[11],但是閾值T的選擇也會影響到所要提取的特征點的數量,而且尺度不變性較差。Tomasi角點檢測是改進后的Harris特征檢測算法,是由Shi和Toma?si發現的,比較兩個特征值,把較小的特征值與最小的閾值進行比較,就能得到強角點。本文中用到了函數cvGoodFeaturesToTrack(),該函數在圖像或選定的區域中檢測最顯著的角點[12-13],具體步驟如下:

(1)該函數在輸入圖像的每個像素點上使用cor?nerHarris()函數和 cornerMinEigenVal()函數計算角點質量數值。
(2)該函數使用非極大值抑制算法,3×3鄰域內的局部極大值被保留。
(3)角點的最小特征值如果小于設定的最小閾值則被忽略
(4)步驟(3)篩選后剩下的角點按照質量數值從高到低排序。
(5)在每個檢測到的角點周圍最小距離的范圍內,如果有更顯著的角點被檢測到,則這個角點被忽略。這樣也是為了保證最顯著的角點被保留下來。
2.2 金字塔光流法檢測
運動目標具有隨時間變化的光流特性,光流法[13]利用此特性進行運動目標檢測。光流法是運動的物體在觀察成像平面上的像素運動的瞬時速度,尋找到當前幀和上一幀之間存在的對應關系。
本文中用到了稀疏光流法[14],亦稱LK光流法,LK光流法針對圖像特征點進行光流計算,而稠密光流對圖像每個像素點都進行光流計算,得到光流矢量的計算結果,但是圖像特征點[12]提取的準確度對其會有影響。故為了得到強角點,本文中運用了Shi-Tomasi角點檢測,效果高于Harris角點檢測,能夠檢測出效果更好的特征點。
Lucas-Kanade算法原理。
(1)亮度恒定。視頻圖像序列中不論時間如何變化目標的像素保持基本一致:
(2)時間連續,指相鄰幀之間的運動較小。
一維空間中光流速度等式為:

其中Ix是圖像的偏導數,It是圖像隨時間的導數,v是速度。
二維空間算法等式為:

結合(3)中內容以及上述過程解出的光流方向進行下一步運算。
(3)空間一致。定義矩陣A,最終得到方程的解如下:
對于一些目標會產生不連貫的運動且比較大的時候,LK光流在實際中的跟蹤效果不是很好,則要求一個大的窗口來捕獲運動,圖像金字塔光流法可以解決這個問題。
(1)在較大的空間上進行跟蹤。
(2)在圖像金字塔的最高層計算光流
(3)設定下一層的金字塔的起始點,即步驟2中得到的運動估計。
(4)重復(1)-(3)過程直到到達金字塔的最底層,實現對運動的跟蹤。
LK算法針對特征點鄰近范圍,只需要每個感興趣點周圍小面積的局部信息,若待檢測的目標突然轉向,或者產生物體遮擋的時候,即發生較大的運動的時候,感興趣點會離開所需小面積的范圍,會無法再找到這些感興趣點,所以當有較大運動的情況下,會產生丟失跟蹤點的現象。金字塔LK算法可以避免此問題,當目標產生較大的運動時,也能夠檢測到所需角點,不會跟蹤丟失。
對于圖像序列,每幀中的特征點的位置都不同,需要對其進行跟蹤,如果兩幀中目標的特征點無明顯變化,定義一個偏移量(u,v):

其中,It是當前幀的值,It+1是下一幀的值。這個微小偏移量(u,v)使用于拍攝時間相近的圖像。使用泰勒展開式來近似方程式(8):

若強度不變假設成立,可以推出下式:

即基礎光流約束方程式,獨特未知偏移量(u ,v)的點都可以利用光流約束進行LK特征跟蹤。在實踐中可通過迭代的方式求解,默認情況下,圖像的層數是3,搜索窗口的尺寸是15。
2.3 Top-Hat目標分割
Top-Hat算子[15]是基于數學形態學的目標分割方法。設f(x,y)是輸入圖像,g(x,y)是結構元素,其運算定義如式(11)和(12)所示。
膨脹就是求局部最大值的操作:

腐蝕是求局部最小值的操作:

開運算和閉運算操作是腐蝕和膨脹的組合,開運算是消除高于其鄰近點的孤立點,是先腐蝕后膨脹,閉運算是消除低于其鄰近點的孤立點,是先膨脹后腐蝕。其定義如式(13)和(14)所示。

形態學的Top-Hat運算是一個經典的高通濾波算法,其用于暗背景上的亮物體,結構元素的選取對目標檢測有很大影響,選好結構元素會影響目標的提取。
形態學Top-Hat運算的定義是原信號與開運算后的圖像作差,使用結構元素g對圖像f進行形態學Top-Hat運算的結果可表述為:

Top-Hat算法對圖像 f中具有如下特征的區域進行分割并保留:
(1)該區域的灰度高于其鄰域;
(2)該區域在某一方向的范圍足夠小,在這個方向上被核腐蝕。
3 實驗結果分析
本仿真實驗所用的軟件是Visual Studio 2010配置OpenCV 2.4.9[16]。為了檢測本文算法的有效性,對來源于區域生態及海表要素時空監測系統的熱紅外波段海面視頻進行了仿真實驗。該視頻總共1000幀,每幀的大小為360×256。在RPCA背景提取時,正則化參數由公式得到,值為λ=0.05。Top-Hat目標分割中閾值T=50,在目標檢測時當閾值小于50時,部分背景像素被誤檢為運動前景,當閾值大于50時,運動前景檢測結果不完整;因此本文將閾值T取為50。
該運動目標檢測算法在視頻集上檢測的效果圖如圖2所示。
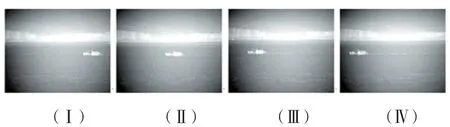
圖2 視頻圖片序列原圖
(Ⅰ)第200幀原圖(Ⅱ)第400幀原圖(Ⅲ)第600幀原圖(Ⅳ)第650幀原圖
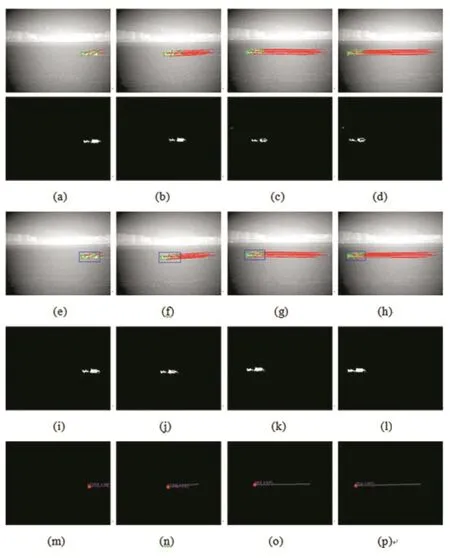
圖3 視頻圖片序列效果圖
(a)-(d)目標區域的角點檢測效果圖;(e)-(h)框定目標;(i)-(l)目標分割;(m)-(p)目標跟蹤
從前景檢測效果圖的對比中可以看到,結合RPCA的金字塔光流法檢測效果可以檢測到所需運動目標,通過RPCA獲取到稀疏矩陣,得到前景區域,再利用光流法檢測,避免了光流法檢測耗時的問題,通過形態需Top-Hat目標分割,使得分割得到的目標更完整,最終完成對目標的跟蹤。
4 結語
本文提出了一種基于RPCA進行前景提取,并通過金字塔光流法進行的運動目標檢測算法。該算法消除了背景像素點對前景檢測效果的影響,解決復雜背景及光照等影響檢測的問題,也避免了傳統的光流法的耗時問題。實驗表明,針對本文中的紅外圖像,所提算法要優于光流法的運動目標檢測,可以在較為復雜的背景環境中較為準確的提取出運動的目標,并進行跟蹤。
猜你喜歡
中國設備工程(2022年12期)2022-07-11 04:33:00
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:36
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:34
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:50
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:48