基于Wiener過程的獨立部件精度預測方法
2018-10-15 07:24:52胡昌華李紅增扈曉翔
中國測試 2018年8期
張 優,胡昌華,李紅增,扈曉翔,白 燦,張 鵬
(火箭軍工程大學控制工程系,陜西 西安 710025)
0 引 言
由于外界環境、人為測量活動及設備自身老化磨損[1]等的影響,測量設備的精度隨時間不斷損失。當該損失達到一定程度時,測量系統不再滿足測量精度的要求,其壽命也隨之終結。但是,系統內部各個組成單元由于材料、性質、結構、性能等不同,造成其動態精度損失的規律也不同。有的部件的精度損失可能較小,可以繼續使用,而有的可能已經報廢。這樣就給設備的校準和更換活動帶來了很大的困難,也造成了資源的浪費和成本的提高。同時,大多數測量設備因為自身設計的缺陷及原位測量的要求,其內部各部件的精度不可直接測量。因此,針對不可直接測量的一類設備,研究動態測量系統內部各部件的誤差傳遞情況,做好精度預測方面的工作,確保整個測量系統在一個壽命周期內正常運行是具有重大實際意義的。
針對存在上述問題的測量設備,首先對總誤差進行成分分離,得到各部件的誤差統計量后,再進行精度預測。目前常用的動態誤差分解的方法[3-4]有獨立成分分析、自適應濾波、小波分析、神經網絡、希爾伯特-黃變換等,應該根據實際情況合理運用這些方法。
現階段對動態精度損失的預測主要是基于數據驅動[2]的方法,分為基于機器學習的方法和基于概率統計的方法。近些年,基于機器學習的方法在精度預測方面運用較多。文獻[5]提出了基于標準量插入動態實時誤差修正的灰色理論與方法,達到預測與修正的目的;文獻[6]提出了基于最小二乘向量機(LS-SVM)的方法對航空發動機的氣路參數進行在線預測;文獻[7]分別將最小二乘擬合法、神經網絡、灰色理論和支持向量機這4種方法應用于精度退化預測,并分析了各自的優缺點和適用范圍。這些方法擬合精度較高,但存在長期預測精度較差,只能給出點估計,顯然不滿足動態特性的要求。相比之下,概率統計類的預測方法主要是基于隨機過程、統計推斷等理論形成發展而來,不僅能給出點估計,還能給出預測結果的概率分布,更能體現動態特性。文獻[8]利用貝葉斯模型對精度退化進行預測;文獻[9]提出根據歷史校準數據估計參數,建立威布爾可靠性模型來對計量周期進行預測。
基于上述研究,結合實際中動態測量系統內部各部件精度損失規律的差異性,本文提出一種基于隨機維納過程的獨立部件剩余精度預測方法。利用極大似然估計法得出參數的初始解,再用貝葉斯方法實現參數的在線更新,進而預測系統各部件的精度損失情況。
1 誤差傳遞模型
根據全系統理論[10],動態測量系統是由若干傳遞單元組成,通過傳遞鏈函數可將系統物理性質進行“白化”,并在此基礎上反映系統輸入與輸出之間的關系。基于此,建立整個系統由總輸入到總輸出的誤差傳遞模型,其表達式為

其中,e(t)是動態系統輸出的總誤差;ei(t)是第i個單元的誤差;ex(t)和ey(t)分別為輸入輸出的噪聲誤差;F(·)是整個系統的傳遞函數;Fi是當前第i個單元到總輸出的傳遞鏈函數。
根據全系統動態誤差建模理論以及系統總誤差規律,采用現代數學分析方法,經過分解和溯源[10]得到測量系統各個部件的誤差變化規律。通過間接測量的方法得到各個部件的精度損失統計量,再進行精度預測。
根據動態測量系統實際誤差測量,得系統總體動態精度損失序列為

再經過誤差的分解與溯源,得到各個結構單元動態精度損失序列為
其中,1,2,···,m為 時間序列,1,2,···n為分量序列。
在本文中,以誤差的均值作為精度損失的統計量。每個單元損失項對系統總的精度損失都有貢獻,其貢獻的程度不僅與各個單元的單項精度損失量Δei有關,還與各個單元的全系統結構誤差傳遞鏈函數Fi有關。因此,各個單元精度損失對系統總精度損失的影響程度是該單元的Δei與Fi的乘積。
2 基于Wiener過程的精度損失模型
動態測量系統在不同測量階段的精度損失一般是非嚴格單調、非平穩的趨勢序列。根據研究,在t到t+Δt時間段內,系統各部件的精度損失量Δei是由相互獨立同分布的隨機微小損失量累加而成的,并且微小損失量的數目與時間成正比,即Δei服從正態分布。因此,可認為部件精度損失過程服從一元Wiener過程[11]。
動態測量系統內部各單元的精度損失量首次超過失準閾值D(一般取精度極限指標Dlim的90%)時,則可以認為該單元失準。定義在ti時刻的剩余精度為Li,其具體實現為li:

根據文獻[12],模型可表示為

其中,X(t)表示tD(tD>ti)時刻的精度退化量,tD為失效時間;xi為在ti時 刻的精度退化量;λ表示Wiener過程的漂移系數,本文假設 λ服從正態分布,即λ~N(μλ,σ2λ);σ表示擴散系數;β(li)是標準布朗運動。
同時,剩余精度的概率密度函數和累計密度函數為
令精度損失增量,由Wiener過程的齊次馬爾科夫性可得 的概率密度函數為Δξi=Xi?Xi?1Δξi

3 參數估計與精度預測
定義參數量θ=[μλ0,σ2λ0,σ2]T,其中,μλ0,σ2λ0為漂移系數 λ的均值和方差。可以通過實時測量得到實測數據,并對歷史數據和在線數據進行誤差的分解與溯源工作,這樣就得到了模型參數估計的統計量。基于此,考慮參數的估計分為兩部分:1)用MLE方法處理離線數據,得到參數初始值,為方便起見,仍然記為 θ=[μλ0,σ2λ0,σ2]T;2)用貝葉斯估計方法對參數 λ進行在線更新。
3.1 參數的離線估計
根據前文,假設經{過誤差分解與}溯 源得到誤差源的誤差數據序列為X(ti),1≤ti≤tf,其中,tf為離線數據的總數。本文研究的對象是一類獨立部件,無法以同類產品的歷史數據作為參考,僅僅具有一組本身的實驗數據。因此,根據文獻[13]中提出的極大似然估計方法,應將其簡化為一維狀態。令t=(t1,···,tf)T,x=(x(t1),···,x(tf))T,x服從多變量高斯分布,均值和協方差分別為

其中
利用極大似然估計對 θ進行估計,對于精度損失序列X1:i建立對數似然函數如下:

其中


極大化式(11)就可得到 θ 最優解θ=[μλ0,σ2λ0,σ2]T,也是參數的初始值,從而在此基礎上實現貝葉斯方法更新隨機參數 λ。
3.2 在線參數更新
為了體現各部件的個體差異性,將3.1節求得的最優解 θ作為λ的先驗分布。在tk時刻,通過數據處理得到所有誤差數據為

采用貝葉斯統計推斷模型[14],得出λ 的后驗分布為
因此,tk時刻對隨機參數λ的更新結果為
根據式(16)、式(17)就可以對每次新獲得的數據進行在線實時更新。基于此,給出剩余精度在tk時刻的概率密度函數,其表達式為
3.3 精度損失預測模型算法
根據上述分析,能夠得到精度損失預測模型算法,步驟如下:
1)根據全系統理論,利用式(1)~式(3),得到系統總誤差后,對系統誤差進行動態誤差分解與溯源,得到各部件的誤差統計量。
2)參數的離線估計。根據步驟1)得到的統計量,對獨立部件利用MLE(式(11))方法求出 θ的初始分布。
3)參數的在線更新。在步驟2)得出的初始值條件下,根據tj時 刻獲得新的單元誤差數據ei(tj),利用貝葉斯推理(式(16)、式(17))實現參數遞推求解。
4)根據參數的更新結果,利用式(18)求得剩余精度的概率密度函數,從而實現系統內部各部件的剩余精度的在線預測。
4 實例驗證
為驗證本文提出預測模型的精確性和描述精度退化過程不確定性的合理性,根據蔣敏蘭等[7]研究的百分表誤差測量數據進行實驗分析。百分表長期使用以后,由于其內部各結構單元的磨損使得測量精度不斷下降。內部結構單元的誤差主要包括側頭磨損誤差、測桿與套筒磨損引起的誤差、測桿和齒條環節的誤差、軸齒輪副環節的誤差和中心齒輪和表盤的誤差。在實驗過程中,發現在81組之后的實驗數據已經超出允許范圍了,所以只取前80組的經過誤差分解與溯源之后的實驗數據來對百分表進行研究,以前3個分量(測桿和齒條環節的誤差特性、軸齒輪副環節的誤差特性、中心齒輪和表盤的誤差特性)為例,如表1所示。
測桿和齒條環節的誤差特性為

軸齒輪副環節的誤差特性為


表1 3個分量的測量數據
中心齒輪和表盤的誤差特性為

其中,x為百分比全量程的采樣點,x=1,2,···,25,c1、c2、c3為常值。
本文取前70組數據作為部件精度退化的離線數據,后10組數據作為在線數據。運用本文的方法對分量1、2、3進行預測,結果如圖1所示。
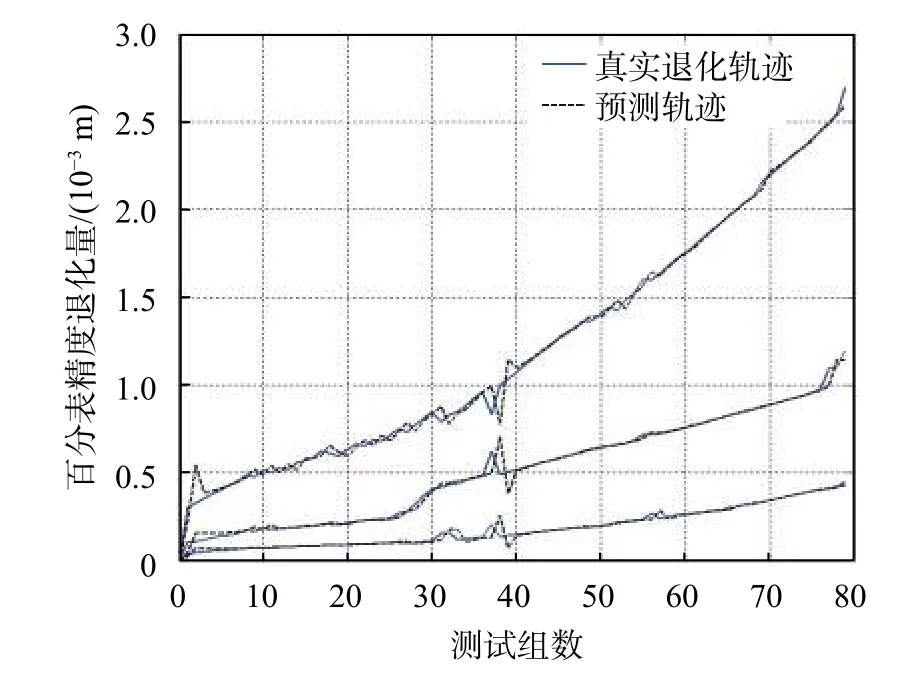
圖1 分量1、2、3的精度退化預測軌跡
從圖中可以看出,百分表各單元由于結構磨損等因素影響,總體呈現上升的趨勢,但并非嚴格服從單調遞增。為了驗證精度損失數據是否符合Wiener過程特點,再對其進行Kolmogorov-Smirnov(K-S)檢驗,置信度為95%,檢驗結果如表2所示,表明數據符合正態分布,可以使用本模型。
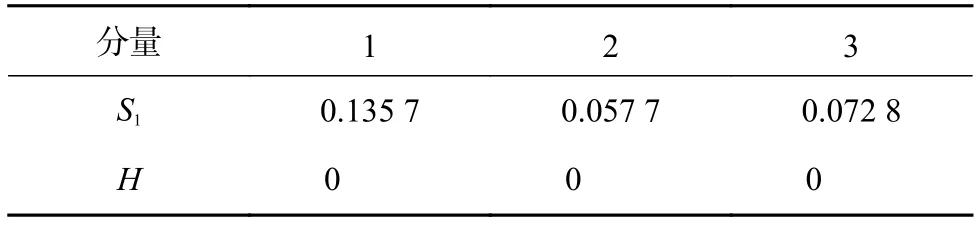
表2 K-S檢驗結果1)
以分量1為例,運用本文提出的貝葉斯更新方法即可得到其精度的概率密度分布。針對第71~77個檢測數據,圖2給出了其概率密度分布圖。
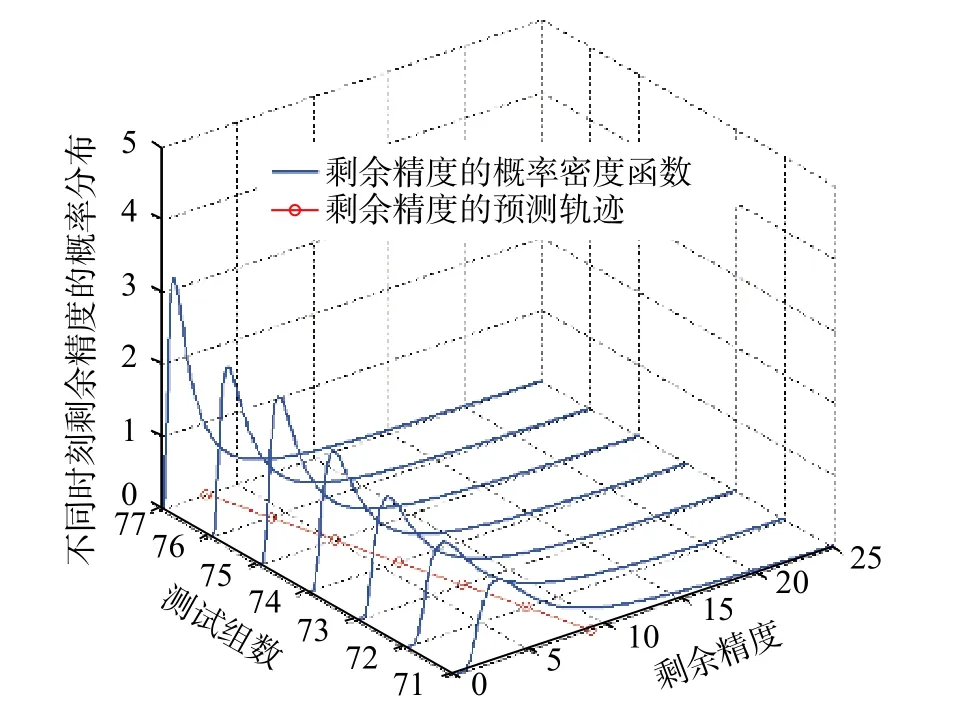
圖2 分量1第71~77個數據的PDF
由圖可知,分量1的第71~77個數據監測點的剩余精度分布的集中程度明顯提高,主要原因在于隨著百分表隨測量活動精度損失不斷累計,剩余精度的不確定性不斷減少,與此同時,預測的準確性不斷提高。為了驗證本方法預測的準確性,引入均方誤差(MSE)指標,定義[13]如下:

其中,xk示在tk時刻的實驗值,x′k表示在tk時刻預測的退化值。得出MSE為4.495 2×10-4,這說明模型能夠有效表征獨立部件的精度退化過程。
同時,引入剩余精度預測的均方誤差:

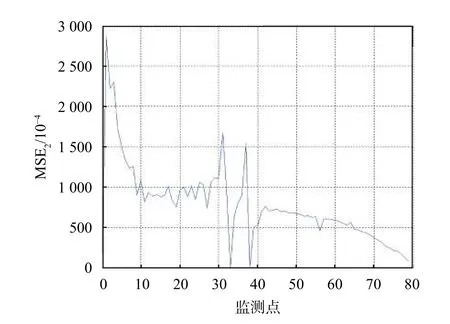
圖3 分量1的剩余精度均方誤差
從圖中可以看出,本文提出的方法能夠準確地預測系統內部各部件的精度,并且隨著參數的更新,預測的準確性不斷提升。
5 結束語
本文根據動態測量系統精度退化過程的特性,提出系統內部各單元的精度退化過程服從Wiener過程。基于極大似然估計方法和貝葉斯方法,提出了一種實時預測的動態誤差預測模型,為校準維護等活動的開展提供了依據。根據實驗結果,得出如下結論:1)本文方法在保證預測精度和較小的不確定性基礎上,給出了預測結果的概率分布,更加符合動態測量的實際特點;2)該方法依賴于間接測量提供數據的準確性,因此下一步工作應著重于提高動態誤差分解與溯源方法的準確性。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
家庭影院技術(2017年9期)2017-09-26 03:41:45
Coco薇(2016年2期)2016-03-22 02:42:52
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
Coco薇(2015年1期)2015-08-13 02:47:34
